基于多智能体的停车选择行为仿真研究
2012-03-09 08:14:34畅芬叶谢秉磊王志利
武汉理工大学学报(交通科学与工程版) 2012年6期
畅芬叶 谢秉磊 王志利
(山西省城乡规划设计研究院1) 太原 030001) (哈尔滨工业大学深圳研究生院2) 深圳 518000)
0 引 言
在静态交通系统中,驾驶员个体的选择特性势必影响到停车系统的运行,分析驾驶员的停车选择行为并对停车管理手段进行评价是静态交通系统的重要研究方面.
考虑到期望效用理论的局限性及前景理论在描述不确定条件下选择行为的优点,本文建立了基于前景理论的驾驶员停车选择模型:首先对深圳市某中心区域驾驶员进行停车选择问卷调查,对各影响因素的参照点进行回归分析,通过价值函数及决策权重函数,得到各影响因素的前景值,利用模糊偏好下多目标决策的权重赋值方法,得到各影响因素的权重,建立停车选择模型.
在所建立的模型基础上,构造了两类智能体:战略层智能体及战术层智能体.利用多智能体仿真软件Starlogo对停车选择行为进行仿真实验,通过设定不同的情景评价停车管理政策和措施的效果.
1 基于前景理论的停车选择行为模型
1.1 停车影响因素及参照点
为了分析驾驶员停车选择行为的影响因素,于2011年3月28日至29日在深圳市罗湖区万象城周边进行了停车问卷调查,发放问卷260份,收回有效问卷213份.调查得知影响驾驶员停车选择的因素主要有行程时间(指驾驶员从出发点至完成停车所用时间,包括路径时间及停车搜索时间)、步行时间及停车费用.
本文利用调查数据确定各影响因素的参照点,选取的变量及回归结果见表1.
通过对停车费率的回归分析,优度比小于0.2,而调查数据显示,有92%的驾驶员认为理想的停车费率是5元/h.造成这一现象的主要原因是调查区域属于深圳市政府规定的停车收费一类地区,停车费率较高,故将停车费率的参照点设置为5元/h.
另外,通过在研究区域内的调查可知该区域静态交通系统资源利用不合理,停车场饱和度不均衡.
1.2 影响因素的编辑和评价
本文以行程时间为例介绍价值函数及概率权重函数的建立过程.
在前景理论中,决策者依据自己的价值参照点确定每个影响因素的价值函数.驾驶员在停车选择时,根据参照点判断备选方案各影响因素的

表1 驾驶员行程时间及步行时间参照点检验
利用Kahneman的价值函数形式,得到关于行程时间的价值函数为



Kahneman经过试验标定,在获得收益时γ=0.61,在受到损失时γ=0.69.

关于主观概率,依据Kahneman 1992年提出的概率权重函数的形式,概率权重计算公式为[1]
在调查区域内,驾驶员一般熟悉停车场至目的地的步行时间及停车场的停车费用,用这两个影响因素的价值函数表达其前景值.
1.3 综合属性值的确定
本文采用模糊偏好下多目标决策的方法确定目标权重[2].选择该方法的依据是:如果所有备选停车方案在单一影响因素下的属性值差异越大,则说明该因素对驾驶员起到较重要的影响作用.设模糊偏好下多目标的权重向量W=[w1,w2,w3]T.
各方案的综合属性值分别为

在求得各目标的前景值极其权重后,建立基于前景理论及多目标决策的停车选择模型,驾驶员根据各停车场的综合属性值做出最优选择完成停车.

表2 模型计算误差表
1.4 模型检验
根据调查得到的停车需求,利用模型计算该区域的驾驶员停车选择结果,通过对比检验模型的有效性,模型计算误差见表2.由表2可见平均误差为4.4%,说明前景理论适合用于描述驾驶员的停车选择行为,所建立的驾驶员停车选择模型是有效的.
2 基于多智能体的停车选择行为仿真
2.1 多智能体系统简介
一般认为,Agent指一个硬件或软件系统或称之为自包含程序,即“soft software”[3],多智能体系统中包含一个以上的Agent,它们为完成某一特定任务而相互协商合作.多智能体系统研究的主要内容有Agent之间的通信、合作协调以及交互作用等,其中通信是其它研究内容的基础.
动态交通系统及静态交通系统都具有复杂性、开放性以及随机性等特点,智能体技术的优点决定了其在交通系统研究中的适用性.目前,智能体技术在交通领域主要应用于交通控制与管理、交通行为仿真及空中交通管理等[4].
2.2 停车选择中的智能体模型
本文基于J.Wahle等[5]最早提出的双层智能体模型,建立停车选择的智能体模型,见图1,每一层智能体都有各自的角色和功能,而且有相互独立的目标和策略.
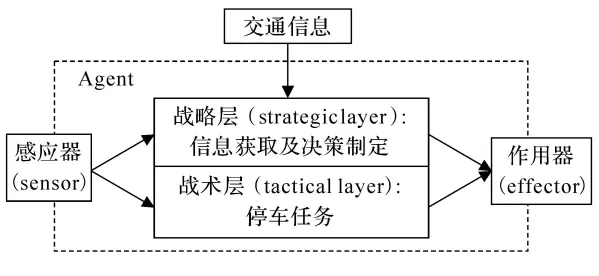
图1 双层智能体模型
战术层(tactical layer)描述了车辆的感知及反应,它的作用是描述车辆的运动,包括车辆的路径选择、变换车道及跟驰,同时,车辆能够被追踪而形成战略层需要的信息.战术层的行为主要包括停车路径选择及跟驰行为.停车路径选择主要是指车辆在战略层制定了停车决策后,根据其决策选择完成停车行走的路径,涉及到车道的选择行为.一般来讲,在目标停车场选定后,驾驶员会选择能最快到达停车场的路径完成停车,在此过程中的车道变换就是为了满足这一目的.同时,当车辆的停车选择改变时,车辆进行新一次的路径选择而完成停车选择.本实验采用正比于速度的间距倒数跟驰模型对停车智能体进行跟驰行为描述:车辆的加减速根据两车间的相对速度及跟驰距离决定,而且有最大速度及最小速度的限定.
战略层智能体负责决策的制定,即求出每个备选停车场的综合属性值,判断最优停车场,指导战术层智能体完成停车.同时,战略层智能体追踪战术层中智能体的信息,获得完备的信息,在决策制定过程中及时地更新信息,从而做出新的决策来影响战术层智能体的活动.
在停车活动中,战略层的决策制定过程同时还要考虑到以下方面的规则:(1)Agent会根据能够容忍的最大步行时间来筛选停车场;(2)目标停车场已满或饱和度较高时,Agent将该停车场从备选方案中剔除并重新决策.
2.3 驾驶员停车选择行为仿真
2.3.1 Starlogo及其与智能体之间的联系Starlogo的功能主要是研究分散系统的运行机制,即自组织系统的自身组织及协调机制.Starlogo的主要功能就是实现分散系统的自组织,完成这种自组织的角色在Starlogo中有三类,分别是Patches,Turtles及Observer.Starlogo的建模环境允许任何个体有自身特定的行动规则及知识库,正是这一特点体现了智能体的自主性.
2.3.2 停车选择行为仿真流程 为了进行后续的仿真分析,有必要建立一个通用的仿真流程,在每种仿真情景中,采用相同的流程,主要包括:
1)路网及停车系统设定.
2)初始化.本实验的初始化涉及到车辆初始化及停车场初始化.车辆初始化包括车辆参数初始化、车辆位置初始化及车辆性质的初始化;停车场的初始化主要是指停车场参数的影响,例如停车费率及停车场饱和度等.
3)车辆的停车选择及行走规则.车辆完成停车选择涉及到停车路径的选择以及在路径上的行走规则,实际上就是战略层及战术层对车辆运行的规定.
4)信息生成及发布.驾驶员能否获得实时信息是影响其停车选择结果及整个停车系统状态的重要因素.实验中,通过累积停车场内车辆数来获得停车场饱和度的信息.
5)仿真情景设定及仿真结果分析.本文主要设置了2个仿真情景:(1)调节停车费率,分析费率调节措施对于调节停车需求的有效性;(2)在研究区域内设置咪表收费的路内停车泊位,分析该停车管理措施的效果.
仿真界面见图2.
仿真窗口中,左侧主要包括了仿真按钮组、停车场饱和度监视窗、车辆数量监视窗、停车场饱和度柱状图,窗口右侧为仿真演示区域.

图2 仿真界面
2.3.3 基于智能体仿真的停车管理措施分析
1)费率调节手段.从本文的停车行为研究中可知现状研究区域内停车资源并未达到较均衡的状态,利用费率调节措施可以发挥经济杠杆调节作用,使区域内停车需求更合理的分布,从而使静态交通系统中的资源得以合理分配.
通过分析可知:停车场一的费率较高,但利用率较低;停车场二及停车场四的饱和度较高,特别是停车场二,由于处于万象城周边,企业为了吸引顾客,停车费率设置得较低.根据调查区域停车场的利用水平及收费标准,本实验拟定了六种费率调节方案,各方案的收费标准见表3.
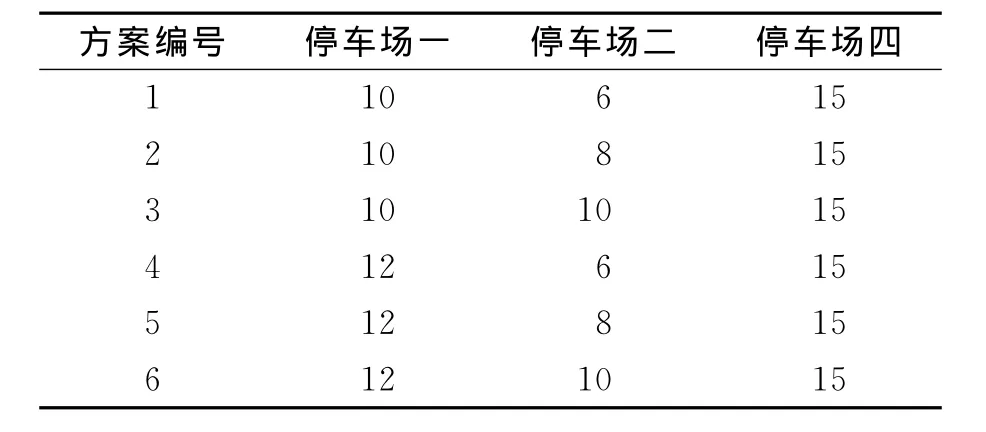
表3 各方案的停车收费标准 元
各方案的仿真结果见表4.
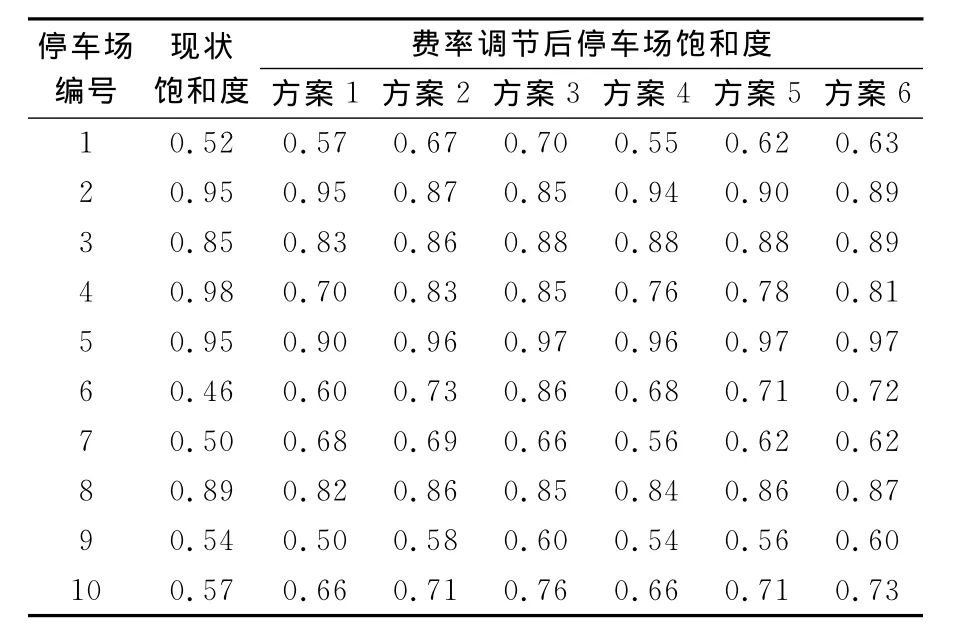
表4 停车费率调节方案仿真结果
仿真结果显示,停车费率调节措施能够优化停车系统的利用水平,是改善该地区静态交通系统设施利用水平的有效措施:调查区内停车场现状饱和度的标准偏差为0.219,各方案的仿真结果均优于停车场现状利用水平.其中,方案3中停车场饱和度的标准差最小,为0.114,从停车系统资源利用更均衡的角度看,方案3是所有方案中的最佳方案.
2)设置路内停车场.在城市道路上设置咪表收费的路内停车场可以加强静态交通的管理,在实现市民方便停车的同时还可以增加政府收入并改善市容.
根据调查区域的实际路网及相关规范,在研究区域设置一定数量路内泊位.考虑到当地经济发展水平,参照深圳市政府关于路内停车咪表收费制度的初步方案,仿真试验中咪表收费采用10元/h的标准,路段的咪表设置情况见表5.
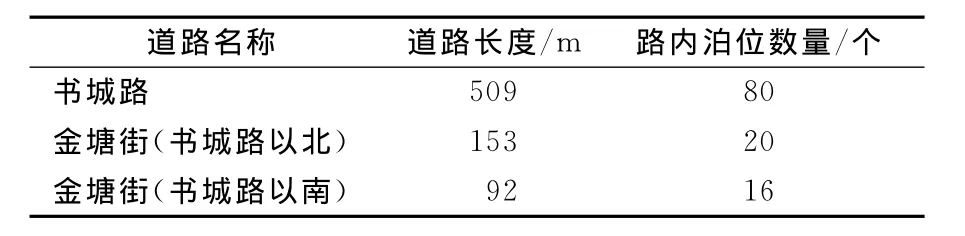
表5 调查区域路内停车场设置情况
仿真的界面见图3,在仿真环境中增加了路内停车场,增加了停车数量时变图及路内停车饱和度监视窗这2个功能块.
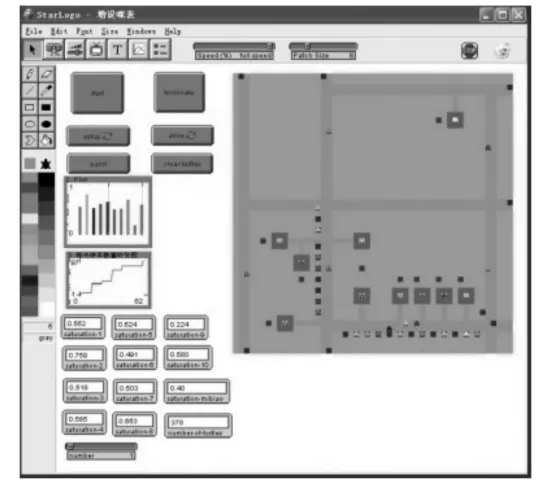
图3 设置路内停车场后的仿真界面
仿真结果见图4和表6.
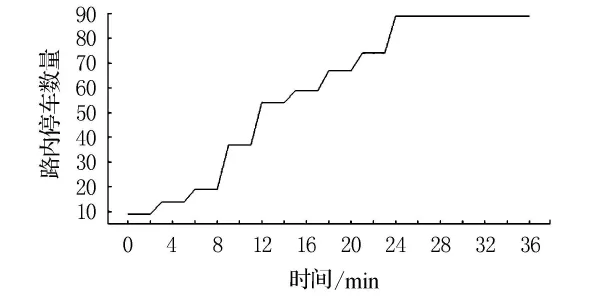
图4 路内停车数量时变图

表6 两种情景下的仿真结果对比
仿真结果显示调查区域内停车场的平均饱和度由0.776下降到0.713,路内停车数量为89辆,停车供需矛盾得到进一步缓解.同时,仿真结果显示,选择路内停车的车辆在在高峰小时的前半段时间增加较快,随着各停车场附近道路内停车场的占用,驾驶员不再选择路内停车的方式.
3 结束语
建立了基于前景理论的驾驶员停车选择模型,在此基础上建立停车选择的智能体模型,利用Starlogo对停车选择行为进行仿真实验,通过设定不同的情景来达到实验目的,研究可为制定停车管理政策和措施提供理论依据及检验手段.然而由于停车问题的重要性及复杂性,很多研究内容有待于更深入的拓展和完善,特别是停车影响因素的选取以及ATIS技术对停车选择行为的影响.
[1]赵 凛.基于“前景理论”的先验信息下出行者路径选择模型研究[J].交通运输系统工程与信息,2006,6(2):42-46.
[2]周文坤.模糊偏好下多目标决策的一种客观赋权方法[J].上海大学学报:自然科学版,2004,10(4):410-412,419.
[3]李 英.多Agent系统及其在预测与智能交通系统中的应用[M].上海:华东理工大学出版社,2004.
[4]刘金琨.多智能体技术应用综述[J].控制与决策,2001,16(2):133-140,180.
[5]WAHLE J.The impact of real-time information in a two-route scenario using agent-based simulation[J].Transportation,2001,10(1):399-417.
猜你喜欢
小资CHIC!ELEGANCE(2021年25期)2021-07-29 08:44:26
环球时报(2019-12-11)2019-12-11 04:14:28
环球时报(2018-12-24)2018-12-24 04:16:52
电子制作(2018年9期)2018-08-04 03:31:18
电子制作(2016年15期)2017-01-15 13:39:21
少年博览·初中版(2016年11期)2016-11-30 05:02:05
少儿科学周刊·儿童版(2015年7期)2015-11-24 03:51:50
中国石油石化(2015年17期)2015-06-01 12:21:42
理科考试研究·高中(2014年11期)2014-11-26 04:23:34
优雅(2014年4期)2014-04-18 10:18:25