
基于松弛技术的重频密频结构模态灵敏度分析
2012-03-07 03:01张淼,于澜,鞠伟
合肥工业大学学报(自然科学版) 2012年12期
张 淼, 于 澜, 鞠 伟
(1.长春工程学院 理 学院,吉林 长 春 130012;2.中国第一汽车股份有限公司 技 术中心,吉林 长 春 130011)
0 引 言
大型空间柔性结构振动的一个主要特点就是固有频率低而且密集,其中一个难点就是如何控制轻阻尼的模态密集型结构,常见的方法是将密集模态处理成为重频模态来研究控制器的设计[1-4]。由于频率密集时,对应的单个模态往往呈现病态,极可能出现不稳定现象,所以很难确定,因此单特征值的灵敏度分析方法已不适用[5-7]。而对于完备的重频系统,特征子空间是良态的,容易确定,并可用于计算其相应的灵敏度。当把重频系统得到的控制规律应用到密频系统时,必须考虑由此产生的误差及重频模态的敏感性问题。
文献[8]分析了模态不稳定性对密频系统控制性能的影响及溢出问题,并给出了密频系统的参数自调整模糊振动控制方法。文献[9]研究了重频系统状态估计器的方法。文献[10]给出了密频子空间可控度和可观度的小参数方法。
目前用全模态方法分析密集模态敏感性问题仍未妥善解决,本文通过引入松弛因子的技术建立重频系统模态灵敏度算法,进而分析了重频、密频模态对灵敏度矩阵的影响程度。
1 完备系统的灵敏度分析
对N自由度的线性振动系统,即

其中,M、C和K∈RN×N分别为系统的质量、阻尼和刚度矩阵,它们并没有强加传统的对称正定条件的限制,但假定M-1存在。
对第i个特征对(λi,ui),λi是第i个复特征值,ui是相应于λi的复特征向量,并满足方程Mui+λiCui+Kui=0(∀i=1,…,2N)。
假设系统(1)可以被一系列m个设计参数g=(g1,g2,…,gm)T所描述,这里gi可以是梁截面、板厚度等参数,g称为设计向量,则M、C和K可以都是关于设计向量g的函数。当系统修改时,设计向量g发生扰动,记

其中,Δgi(i=1,…,m)是第i个设计参数的扰动量。记ui扰动后的形式为,取其线性部分,得

其中,[▽ui]=[ui,1,ui,2,…,ui,m]为N×m阶矩阵,称为特征向量灵敏度矩阵,ui,j=∂ui/∂gj表示ui对第j个参数gj的变化率。
为了确定灵敏度矩阵,需分别计算得到ui,j(j=1,…,m)。
由于系统(1)的状态矩阵为:

则相应的特征问题为:
定义:

利用完全的状态空间系统展开定理,有

其中,φk为矩阵A的特征空间的基底为展开系数。文献[11]给出了单特征值系统的灵敏度分析的展开式系数的计算公式,但由于其公式的分母中含有λi-λk项,所以当系统对应重频或密频状态时,此类计算公式将会失效。
将(5)式两边关于第j个参数gj求导,得

整理得:

将(7)式代入(9)式,有

或写成:

其中

这里λi,j、φi及A,j为已知,当系统(1)完备时,模态矩阵Φ可逆,则(10)式可表示为:解耦(11)式,可分别计算求解得到系数,将其代回(7)式,并取其前N维就得到了模态灵敏度向量ui,j。
2 松弛因子的选取原则
由于(11)式中对角矩阵J奇异,若λk(k=1,…,2N)为单特征值时,秩数rank(J)=2N-1,因此,(11)式为亚定方程组或超定方程组,其解始终无法唯一确定,甚至可能无解。
为了解决这个问题,对于固定的k引入松驰因子ω(ω>0),令

代入(11)式,得
实验组总体健康、生理功能、社会功能、活力、生理职能、情感职能、躯体疼痛和精神健康方面和对照组实验数据间均存在着明显的差异,且P<0.05,具备统计学分析意义。见表1。

若λk为m重特征值,而其他特征值均为单特征值时,秩数rank(J)=2N-m,此时系数对角阵J中会出现m个零对角元,(11)式中就有m个组合系数(d=1,…,m)不能确定。用类似前面的分析方法,引入松弛因子ω,显然当i≠k时的系数是精确的,而i=k对应的系数是要通过简单优化近似得到的,这时最佳松弛因子ω*收敛准则可选择为:

其中,ηtol为允许误差界。由于对角阵的解耦性能,这种方法对其他系数(m≠k)的求解不会产生任何影响。
3 敏感模态的变化规律分析
由(12)式可知,当ω较小时,特征子空间即为密频子空间,ω→0的过程,正是由密频至重频的转换过程,(7)式中的组合系统可以反映模态敏感状态。从(13)式可以看出,当ω越小时的值相对而言就会越大,与它对应的模态在灵敏度中的贡献就会越大。
由此分析可知,重频模态具有高度的敏感性,它们相对于其他频率模态而言对灵敏度的贡献最大,这是因为它们在灵敏度的线性组合式中的组合系统的权重最大。
而对于密频系统,随着频率密集程度的增加,密集模态的敏感性程度提高。
4 数值算例
4.1 模态敏感性分析算例
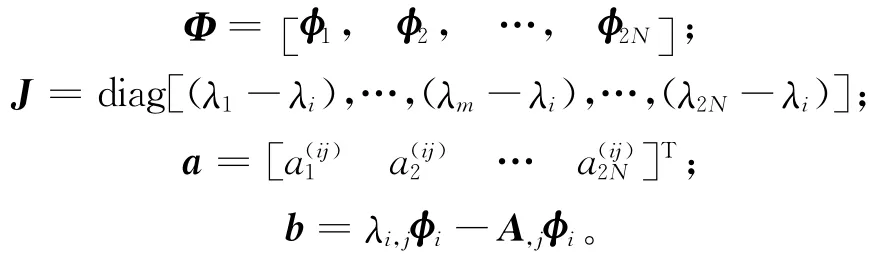
在一个5-自由度的质量弹性阻尼系统中,假设只在垂直方向上产生振动,如图1所示。
图1 5-自由度非比例阻尼系统
系统质量阵的元素为:


阻尼矩阵的元素与刚度矩阵的元素有类似的形式。例如,c11=c1;c12= -c1;c13=c14=c15=0;c22=c1+c2,等。
对应初始系统的状态矩阵A,求得初始系统的特征值,见表1所列。

表1 初始系统的特征值
从表1中可以看出,第7、第9和第8、第10为2对复数的重特征值。为便于说明,本文以重特征值第7和第9个为例,设计变量取k5,变化率为Δk5/k5=0.01,求解其特征向量灵敏度。
根据(11)式,J是秩数为2N-2的对角阵,其主对角元见表2所列。

表2 矩阵J的主对角元
通过求解单个解耦方程,直接计算出J方程组中除第7个和第9个以外的所有展开系数7,9)。而为计算a(ij)7、a(ij)9,根据本文提出的引入松弛变量ω技术,就可得到全部展开式系数a(ij)k。表3所列给出了松弛因子ω=0时的精确解和ω=1,0.1,0.000 1所得到的解。
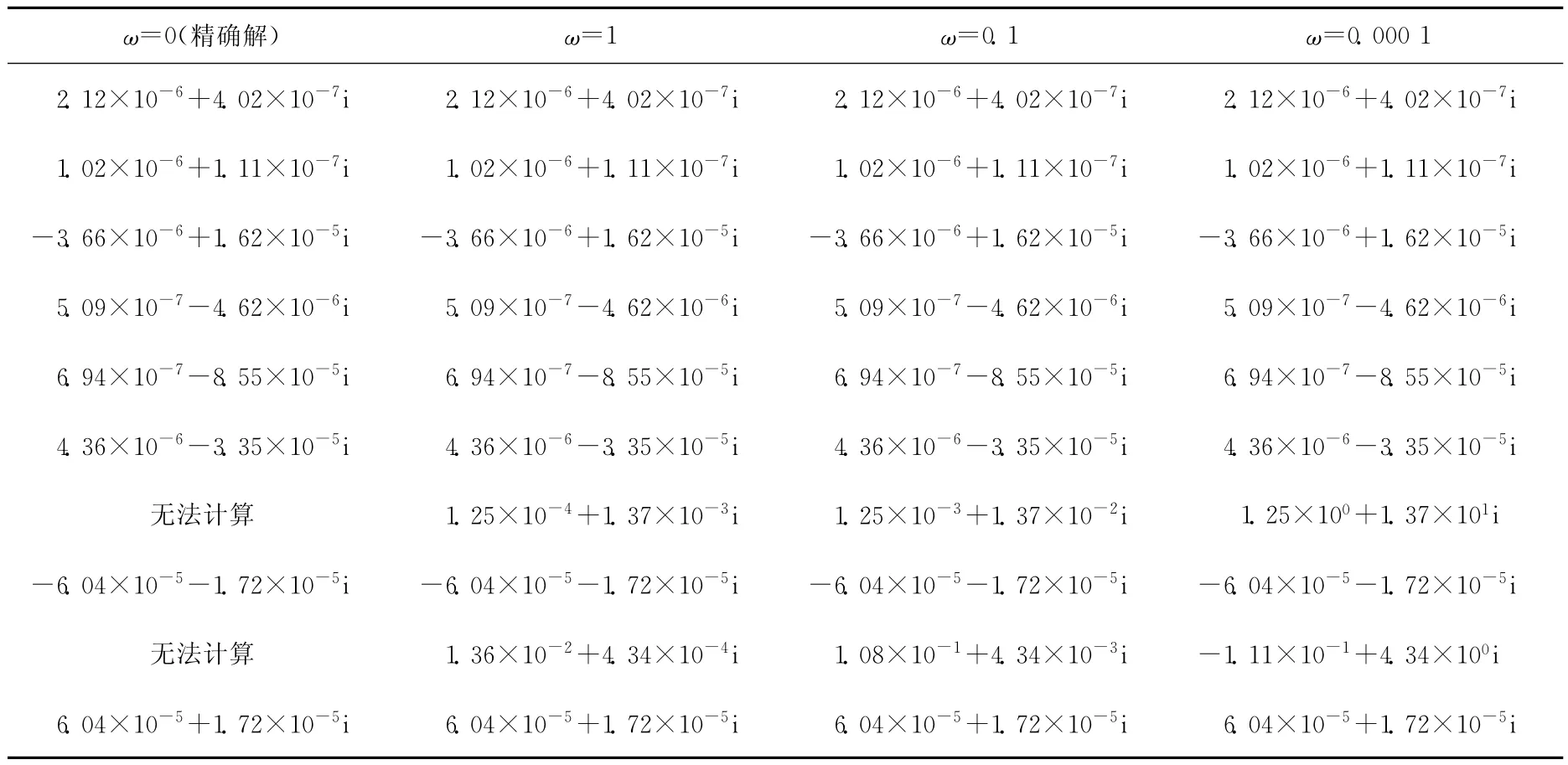
表3 灵敏度系数对比
从表3中可以看出,当m≠7,9时,引入松弛变量后所得到的新解中与精确解中完全一致,而随着ω的变化与的变化也呈现出明显的规律,即ω越小与的数值越大,这说明其对应模态的敏感性越强,在系统摄动量中的贡献就越大。
4.2 模态灵敏度分析算例
考虑文献[9]中给出的弹簧质量系统,如图2所示。

图2 弹簧质量系统
其中,k1=0.95;k2=k3=…=k10=0.03;k11=1.05;m1=m2=…=m10=1.0,每个频率的自然阻尼系数都为0.05。
用有限元方法提取系统的性质矩阵后,经计算得到初始系统的前10个特征值和以k11为设计参数,用本文方法所得到的前10阶模态灵敏度近似值,结果见表4所列,表4中,‖ui,k11‖为模态灵敏度值。
从表4中可以看出,系统的第9及第10特征值十分接近而构成一个密集频率子空间,并由本文所得到的灵敏度值可知,第9阶与第10阶模态关于参数k11的振动稳定性较差,这与文献[9]中的结论一致。

表4 系统特征值及模态灵敏度值
5 结束语
由于重频或密频的影响,在模态灵敏度算法中需要求解一种可能为亚定或超定方程组,但由于其系统阵已化为对角阵,所以很容易分析其性态。本文通过引入松弛因子的技术,提出一种精确而简便的求解亚定或超定方程组的方法,并给出其收敛准则及误差估计方法。该方法不仅适用于单频系统,还适用于重频系统的灵敏度分析,为密频系统的振动控制等研究工作提供了良好的理论模型。
通过重频系统的灵敏度分析,得到了重频模态具有高度敏感性的结论,它们相对于其他频率模态而言对灵敏度的贡献最大。而对于密频系统,随着频率密集程度的增加,其模态的敏感性程度也随之提高。数值算例验证了该方法的有效性。
[1] Abe M.Vibration control of structures with closely spaced natural frequencies by a single actuator[J].Journal of Vibration and Acoustices,1998,120(1):117-124.
[2] 刘一武,张洪华,吴宏鑫.可控性差的空间密集模态的结构的振幅最优控制[J].自动化学报,2002,28(2):1-6.
[3] Sun H L,Zhang P Q,Chen H B,et al.Active control of a structure with continuously closely spaced natural frequencies [J].Journal of Sound and Vibration,2006,294:15-22.
[4] 程 琳,谢 峰.一种基于振动的汽车主减总成在线故障诊断系统[J].合肥工业大学学报:自然科学版,2011,34(8):1138-1141.
[5] 刘利军,樊江玲,张志谊,等.密频系统模态参数辩识及其振动控制的研究进展[J].振动与冲击,2007,26(4):109-115.
[6] Moon Y J,Kim B W,Ko M G,et al.Modified modal methods for calculating eigenpair sensitivity of asymmetric damped system[J].International Journal for Numerical Methods in Engineering,2004,60:1847-1860.
[7] 解惠青,戴 华.非亏损动力学系统特征对导数的计算[J].振动工程学报,2004,17(3):369-373.
[8] 刘潇翔,胡 军.包含密集模态的空间结构的模糊主动振动控制[J].空间控制技术与应用,2010,36(4):18-24.
[9] 徐博候,鲍荣浩,张阿平.密频系统振动控制的状态估计[J].力学学报,2000,32(5):606-612.
[10] 陈德成,杨靖波,白 浩,等.密频子空间的可控度与可观度[J].应用力学学报,2001,18(2):15-19.
[11] Adhikari S.Rates of change of eigenvalues and eigenvectors in damped dynamics system[J].AIAA Journal,1999,39(11):1452-1457.
猜你喜欢
数学物理学报(2021年5期)2021-11-19
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
数学年刊A辑(中文版)(2018年4期)2019-01-08
制造技术与机床(2018年12期)2018-12-23
数学物理学报(2018年3期)2018-07-17
成都信息工程大学学报(2017年1期)2017-07-21
探测与控制学报(2015年4期)2015-12-15
东北电力大学学报(2015年1期)2015-11-13
电力工程技术(2013年3期)2013-03-11
文山学院学报(2012年6期)2012-03-25
