太阳能路灯智能控制系统设计
2012-03-05 07:55李丽丽施伟
电源技术 2012年5期
李丽丽,施伟
(辽宁工程技术大学电子与信息工程学院,辽宁阜新123000)
随着社会的迅速发展,可再生能源消耗逐步加剧,能源燃烧造成的空气污染也是越来越严重,为了维持人类的可持续发展,利用可再生清洁能源已经成为现今人类的重要任务[1]。太阳能作为一种可再生的无污染能源自然成为了新时代能源的“新宠”,太阳能是一种“取之不尽,用之不竭”的安全、环保的新能源,也是人类可以自由利用的能源。太阳能路灯集成了太阳能光伏发电与LED固态照明两种技术的优点,将新一代能源和新一代光源良好的结合[2-3]。与传统照明工具相比,太阳能路灯不需要设置输电线路和铺设电缆,也不需专人管理和控制,太阳能路灯仅需一次性投入,且维护成本低,短期即可收回投资成本,受益长久。太阳能路灯不存在安全隐患,绿色环保。
1 设计方案
通过对现今已有的LED路灯与传统路灯数据的对比,结合太阳能路灯的自身特性,本设计需要实现的功能总结如下:
(1)电池板功率的计算与选用;
(2)自动跟踪太阳角度;
(3)蓄电池容量,充放电的控制与充放电状态显示;
(4)连续阴雨三天时,路灯仍能照明;
(5)光线暗时,灯能自动点亮,为节约电能晚上24点时熄灭,早上五点路灯自动点亮,早上光线强时自动熄灭。
太阳能路灯控制器常用的有:单独光控制型、时钟控制型和经纬控制器型等,由于各自的工作原理不同,各有其优缺点。本文结合以上几种控制方式的优点,综合考虑节电、经济和实用等问题,将定时控制和光敏电阻控制方式相结合,来实现太阳能路灯的设计。
2 系统设计
2.1 系统总体结构
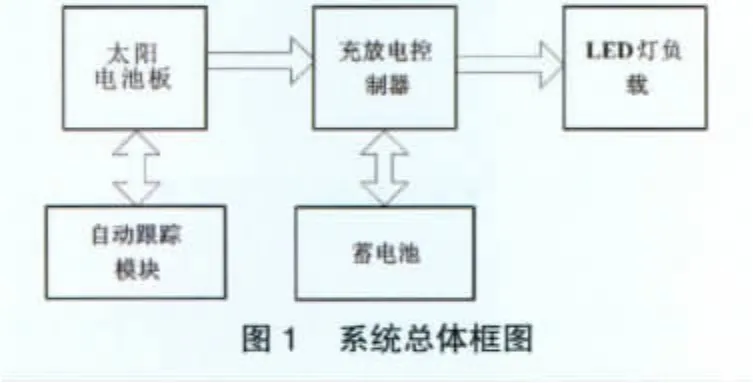
在白天,太阳能路灯通过太阳电池组件采集太阳光能量,将其转化为电能并储存起来,即给蓄电池充电;晚上光线较暗时,蓄电池由路灯控制处理器控制,点亮路灯实现照明。根据各部分电路的不同功能,整体电路可分为以下几部分:太阳电池板组件、过充过放电控制电路、自动跟踪装置、单片机、蓄电池、时空光控电路、照明负载与时间显示电路等,系统总体框图如图1所示。太阳电池板通过稳压电路给单片机供电,同时为蓄电池充电,当蓄电池电压较低时,其容量损耗将很快,使用的寿命也会变短,为了延长蓄电池的使用寿命,就要防止蓄电池出现过充或过放,因此在整个设计过程中需要过充过放的控制电路。
2.2 系统基本组成和设备选择
系统由太阳电池组件(包括支架)、控制器、LED灯头、蓄电池和灯杆等几部分组成,太阳电池板工作效率较高,是太阳能路灯的核心部分,更是太阳能路灯系统价值最高的部件。太阳电池板将太阳的辐射能转换为电能,并送至蓄电池中将其存储下来,对系统的抗风设计非常有利。太阳能LED灯是利用太阳电池组件实现发电,蓄电池储电,通过控制蓄电池的充放电工作。太阳能控制器主要功能是保护蓄电池,其必须具备过充保护、过放保护、光控、时控和防反接等基本功能。太阳能蓄电池组是太阳电池方阵的储能设备,主要作用是将方阵在日照多时发出的多余电能储存起来,在夜晚或阴雨天时供负载使用。
2.2.1 太阳电池组件
为使太阳电池组件一年中接受的太阳辐射能量尽可能的多,就要为太阳电池组件选择一个最佳的倾角,倾角可以通过Hay模型来计算,通过计算可以获得不同倾角平面的月平均太阳辐射量的变化情况。太阳电池板的倾角是指太阳电池板平面与水平面的夹角。通过查询辽宁省阜新市的维度为41.77度,最佳倾角41.77+1=42.77度,年平均日照时间是4.6小时。在不同角度倾斜面上,太阳的辐照量差别较大,要为电池板选择合适的倾角才能使其获得最大的太阳辐照量。根据资料分析,设计系统默认初始倾斜角为50度。
太阳电池板主要有单晶硅和多晶硅两种,多晶硅面积较大,但发电效率没有单晶硅高,设计采用单晶硅太阳电池组件。
2.2.2 蓄电池和太阳能板
蓄电池用于给路灯供电,本设计的路灯工作电压为24 V,工作电流约1.2 A。由于路灯一天需要工作8个小时左右,考虑连续阴天3天情况下的系统供电,后备电源必须具有24 h的供电能力,且按80%的放电率进行计算,则蓄电池容量可通过公式(1)计算。

式中:Qx为蓄电池容量;Tx为蓄电池放电时间;Is为设备工作电流;
计算可知应选用24 V/36 Ah免维护蓄电池。
有日照时,需要太阳能板为蓄电池充电,每天有效充电时间为8 h,两天充满,可计算出太阳能板输出的功率,如式(2):

式中:Qx为蓄电池容量;D为充满电需要的天数;Qs为日耗蓄电池容量;Vg为设备工作电压;Tc为充电满电所用时间。
通过计算可知太阳能板应选择24 V/70W。
2.2.3 照明负载
本设计采用高亮LED管作为系统的照明负载,其正常工作电压3.3 V,共选用28个1W高亮管,每7个高亮管串联为一组,共四组并联在电路中,这样可以减少当电路中的某一个高亮管出现故障对其他高亮管的影响,由于高亮管的直射效果较好,因此灯具的体积要尽量小一些,这样可以增大高亮管的照射范围,应尽量选择照射角度大的高亮管。
2.3 系统设备性能指标
通过2.2节的介绍,本系统的设备性能指标如表1。

3 详细设计
3.1 硬件系统详细设计
3.1.1 MCU
本系统采用AT89S52单片机作为整个系统的控制核心。AT89S52是一种低功耗、高性能8位微控制器,具有8K在系统中可编程Flash存储器。使用Atmel公司的高密度、非易失性存储器技术制造,且与工业80C51产品的指令和引脚完全兼容。片上Flash允许程序存储器在系统可编程,亦适用于常规编程器。在单芯片上,具有灵巧的8位CPU与在系统可编程Flash,这使得AT89S52在众多的嵌入式控制系统中得到广泛应用。
3.1.2 电源电路
电源电路如图2所示。系统太阳能供电,24 V蓄电池电压经过7805稳压后产生5 V电压,作为控制器的主电源。电容C2、C3作为高频旁路电容,将高频信号旁路到地[4]。同样的电容C1、C4为滤波电容。

图2 电源电路
3.1.3 显示电路
本设计电路采用单片机串口显示,由74LS164作为数码管驱动电路,二极管D1、D2和D3承担降压、保护数码管的作用,数码管选用四位,前两位显示小时,后两位显示分钟内容,显示电路如图3。STC12C2051单片机的串行口RXD,TXD作为一个全双工串行通信口,在工作方式0下可作同步移位寄存器使用,其数据由RXD(P3.0)端串行输出或输入;同步移位时钟由TXD(P3.1)端串行输出,在同步时钟的作用下,实现由串行到并行的数据通信。由于74LS164在低电平输出时允许电流达到8mA,因此不必添加驱动电路,亮度也较为理想。

图3 显示电路
3.1.4 过充、过放控制电路
过充控制,即在蓄电池处于过充状态时能够断开充电电路,过放控制电路就是当蓄电池处于过放状态时可以断开放电电路[5-6]。过充、过放控制目的都是为了保护蓄电池,过充控制电路中将继电器J1的开关串联在充电电路中,在白天太阳光充足处于正常充电状态时,由太阳能板吸收热并经继电器开关常闭点向蓄电池充电,当蓄电池电压高于26 V时,认为蓄电池处于过充状态,U1A“-”端电压高于“+”端电压时U1A输出“-”,低电平,使Q1截止,同时Q2导通,继电器线圈J1通电,则继电器常闭点断开,常开点闭合,充电电路断开,过充指示灯亮,即停止向蓄电池充电,达到过充保护的功能。
过放控制电路中,将继电器J2的开关串联在放电电路中,在正常放电状态时,放电电路正常工作。当晚上由蓄电池向负载供电时,蓄电池的电压低于22 V时,认为蓄电池处于过放状态,此时U1B“+”端电压低于其“-”端电压时,U1B输出“-”低电平,使Q3截止,同时Q4导通,继电器线圈J2通电,继电器开关由常闭点转到常开点,放电电路断开,过放指示灯亮,停止向负载供电,实现过放保护的功能。
3.1.5 太阳自动跟踪电路
自动跟踪模块的控制部分采用光敏电阻光强比较的控制方式[7-8]。在跟踪电路的设计中,对光敏电阻的结构设置进行了改进优化,使数据采集部分能够及时地反应出太阳光线较小或较大的变化。通过在太阳光接收器上安置一个圆筒作为阻挡物,并在圆筒内外四个方向分别放置光敏电阻,构成的传感器安置在与电池板同一平面,通过光敏电阻输出来调整太阳能板的角度。单路光敏电阻的采集电路如图4所示。

图4 单路光敏电阻采集电路
3.2 软件系统详细设计
系统的软件采用Keil C编制,主要由主程序、时间设定子程序、1302的读写子程序、24C02的读写子程序、时间比较子程序、按键子程序、显示刷新子程序等组成。程序开始进行初始化,调用24C02内部存储的开关路灯时间点,程序每间隔一段时间调用一次1302中的时间。通过程序将设定的时间与系统当前时间进行比较,设定比较的间隔为1秒一次,当时间相同时,通过程序输出控制信号,来对驱动电路进行驱动。程序整体设计流程见图5。

图5 程序整体流程图
4 系统测试
系统设计完成后,对自动跟踪和充放电控制两个主要的功能模块进行了系统测试,具体测试过程如下。
4.1 自动跟踪模块测试
根据辽宁省阜新市(东经122度,北纬42.1度),2011年7月9日上午9点至下午1点,以半小时为单位,系统对太阳高度和方位跟踪进行测试。具体测试方案如下:
(1)设置初始位置和初始时间;
(2)步进电机每次最小转动1度;
(3)记录每次步进电机转动的角度;
(4)对比系统偏转角度和太阳实际角度。
测量及对比结果如表2和图6所示。通过以上测试,验证了本系统能够精确跟踪各种情况下的太阳光方向和高度变化,调节太阳能板对太阳方位角和高度角进行跟踪,调节精度与实际角度误差范围在2度以内。

4.2 过充过放模块测试
于2011年7月5日至7月8日,在辽宁工程技术大学阜新校区新华楼楼顶采用太阳电池板串联2节蓄电池同时外接一个100W灯泡进行过充过放模块的联合测试:
(1)太阳电池板电压和蓄电池电压保持线性关系,且略高于蓄电池电压。
(2)白天蓄电池充电电压始终保持在24.3~25.8 V之间,达到25.8 V系统自动停止充电且过充保护灯闪烁,证明蓄电池过充控制正常。
(3)黑夜100W灯泡点亮,蓄电池放电电压维持在25.4~22.3 V之间,当蓄电池电量低于22.3 V时灯泡自动熄灭,证明过放控制正常。
5 结论
本文通过对太阳能路灯智能控制系统的设计和测试取得成果如下:
(1)设计太阳能跟踪模块,实现太阳能板对太阳光线的跟踪误差小于2度。达到实时、精确最大限度地吸收太阳能的效果。
(2)使用了光控和时控相结合的方法,避免了光控方法易受干扰、时控方法需要频繁设置时间的麻烦,为达到节约用电目的,在深夜行人较少时路灯根据设置的时间熄灭,早上行人多时根据设置的时间亮灯。
(3)采用了合理的蓄电池充放电策略,实现算法简单,有效地提高了蓄电池寿命,具有一定参考和推广应用价值。
[1] 张建坡,张红艳,王涛,等.光伏系统中最大功率跟踪算法仿真研究[J].计算机仿真,2010,27(1):266-270.
[2] 陈维,沈辉,丁孔贤,等.太阳能LED路灯照明系统优化设计[J].中山大学学报,2005(11):95-98.
[3] 周昶,马磊,吴春泽,等.使用超级电容的太阳能路灯系统的仿真研究[J].照明工程学报,2010(6):76-81.
[4] 伊世明,徐贵生,高瑞林.一种智能型太阳能路灯的设计[J].太阳能,2009(2):54-56.
[5] 郭俊钊.太阳能LED路灯充放电控制器的设计[J].应用技术与研究,2009(8):33-34.
[6] 王翥,孙嘉宁.基于双CPU的路灯集中控制器设计[J].仪表技术与传感器,2011(1):71-73.
[7] 刘春.基于太阳能的嵌入式路灯控制系统的研究与应用[D].南京:南京航空航天大学,2010.
[8] 吕运朋,李宏超,张为民,等.基于STC单片机的智能LED路灯控制器设计[J].电源技术,2010,134(5):496-498,508.
猜你喜欢
——以高PbI2掺杂水平的钙钛矿光阻膜、Bi2S3光阻膜、ZnO光阻膜为例
电子元器件与信息技术(2020年11期)2020-12-14
启蒙(3-7岁)(2018年12期)2018-12-13
小学阅读指南·低年级版(2017年11期)2017-12-06
山西青年(2017年8期)2017-01-31
电源技术(2016年9期)2016-02-27
云南师范大学学报(自然科学版)(2015年5期)2015-12-26
电源技术(2015年5期)2015-08-22
电源技术(2015年7期)2015-08-22
物理实验(2014年8期)2014-09-12
装备制造技术(2012年12期)2012-08-31