基于有源滤波器的串口通信设计与实现
2012-02-28 05:10蔺海艳王银照
网络安全与数据管理 2012年9期
蔺海艳 ,刘 海 ,王银照
(1.山东大学威海分校,山东 威海 264209;2.山东滨州供电公司,山东 滨州 256610)
在工矿企业中,非线性电力负荷的大量增加使电网谐波污染日益加剧。而有源滤波器APF(Active Power Filter)能够有效地滤除电网谐波,提高电能质量,已成为谐波补偿的一种发展趋势。随着电网智能化的提高,仅仅完成谐波的滤除是不够的,还需要将有源滤波器所处理监控的一些动态参数(如电压、电流、谐波等)上传给上位机,以实现电网数据的实时监测、分析和处理。串口通信是上位机与下位机数据交换常使用的方法之一,它具有数据传输可靠、连线少、成本低和抗干扰强等优点[1]。因此,在本监控系统中本文采用RS-232串行通信方式完成上下位机的数据交换。如果需要长距离传输,可以加Modem使用电话网或是直接使用无线通信网络。
1 有源滤波器与上位机通信的硬件设计
有源滤波器设计采用并联型拓扑结构,电网电流经电流互感器按比例转换成低电流,经A/D转换器采样后读入DSP控制模块,DSP运用瞬时无功功率理论计算出补偿电流的指令信号,再利用该信号和实际的补偿电流设计滞环比较器,产生PWM信号控制主电路生成合适的补偿电流回馈给电网,以消除电网谐波。
为了完成数据的实时传输,DSP控制模块通过扩展异步通信芯片TL16C750实现系统的高速串行通信。TL16C750具有集成度高、使用方便及兼容性好等特点,可由软件设定16 B或64 B的FIFO,波特率最高可达1 Mb/s,具有可编程的串行数据发送格式[2]。它的片内寄存器选择信号线 A0~A2和数据线D0~D7直接与 DSP相连;片选信号、读写信号、接收准备好和发送准备好信号等控制信号通过CPLD逻辑电路与DSP相连,以便完成对TL16C750的控制。TL16C750接收上位机传来的命令,并将下位机并行数据转换成串行数据上传给上位机。
由于RS-232端口的电气特性规定逻辑1是-3 V~-15 V,逻辑 0是+3 V~+15 V,与 TTL电平不兼容。因此,本设计采用电平转换芯片MAX3232,完成TTL电平到RS-232电平的转换。然后将MAX3232的T1out和R1in接到PC的串口上。有源滤波器与上位机通信的硬件原理框图如图1所示。
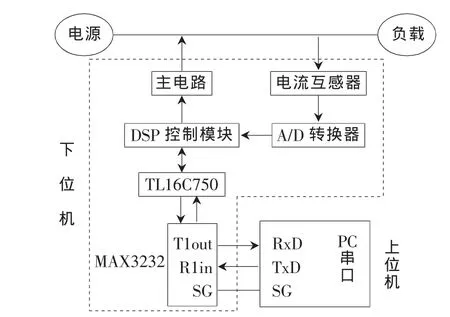
图1 有源滤波器与上位机通信的硬件原理框图
2 通信协议设计
通信协议是指通信双方的一种约定,它规定了数据接收方和数据发送方需共同遵守的某种数据格式、同步方式、传送速度、纠错方式等,是串口通信的基础[3]。本设计采用主从式、半双工通信方式,波特率选择9 600 b/s,1 bit偶校验,8 bit数据位,1 bit停止位,并采用十六进制数据格式来表示指令代码和数据,格式如下:
起始字节 地址码 功能码 参数代号 操作数 结束字节
指令代码和数据都采用定长格式,起始字节为A5,结束字节为5A,没有参数的字节用FF填充。其中,操作数为2 B,其他为 1 B。
地址码为1 B,在多机通信中,每个下位机有唯一的地址码,以响应与该地址相应的数据信息。由于本机还处于试验调试阶段,本文采用最简单的单机通信,即只有一台下位机,该下位机地址码为01H。
功能码包括查询命令、读命令和写命令,每个功能码是1 B,由上位机发送给下位机,告诉下位机执行何种动作。本通信中查询命令、读命令和写命令功能码分别为25H、26H和27H,分别告诉下位机执行查询从机、读数据和写数据操作。
首先,上位机向下位机发送查询从机命令,命令格式为:A5+地址码+查询命令(25H)+FF FF FF 5A。下位机接收到命令后,上传特定数据给上位机,以完成上下位机的握手。
通信指令包括一条读指令和一条写指令。
读指令格式为:A5+地址码+读命令 (26H)+FF FF FF 5A。
返回数据为电压、电流、谐波电流、小数点位置。
写指令格式为:A5+地址码+写命令 (27H)+参数代号+被写入参数值+5A。
当上位机将读指令发送给下位机时,下位机将采集的电压、电流、谐波电流和小数点位置上传给上位机。小数点位置用1 B表示,其他参数由2 B组成,低字节在前,高字节在后。
写指令中的参数代号是指有源滤波器中需要修改的参数,如01H表示波特率,02H表示小数点位置。被写入参数值用2 B表示,低字节在前,高字节在后。比如,写指令为A5 01 27 01 80 25 5A,则表示要将下位机的波特率改为9 600 b/s。第一个01H表示从机地址,27H表示写命令,第二个01H表示需要修改波特率,要修改成的数据是2580H,十进制为9 600。
3 串行通信软件设计
串口通信软件设计包括下位机的DSP串口编程和上位机的程序设计两部分。下位机的串口编程主要由串口初始化和通信协议组成,它接收上位机传来的指令,并根据指令作出相应处理。上位机软件设计主要包括串口配置和后续数据处理,它向下位机发送命令,并将接收到的数据进行处理、运算和保存。
3.1 下位机串口软件设计
下位机的串口编程首先要完成串口的初始化,也就是设置操作所需要的参数,如设定串行通信中字符的格式、波特率和工作方式等。在本系统中,异步通信芯片采用TL16C750,它内部有 11个寄存器,占用7个 I/O口地址。DSP工作在微处理器模式,选择TL16C750端口地址为 4000H~4006H (A15=0,A14=1),并通过控制地址线A0、A1、A2和线路控制寄存器的除数寄存器选通位D7来选通不同寄存器,以便进行读写操作。
在异步串行通信中,一方的发送数据波特率一定要和对方的接收数据波特率相同[4],本系统设置波特率为9 600 b/s,又因 TL16C750的晶振是 14.745 6 MHz,根据“发送波特率=输入时钟频率÷除数寄存器内容÷16”可得波特率除数寄存器(低位地址是4000H,高位地址是4001H,选择该地址时,线路控制寄存器的 D7=1)内容为96,转化成十六进制是0060H。
线路控制寄存器地址为4003H,它既是可写的也是可读的,该寄存器中的内容规定了通信中一帧的格式。本系统选择通信格式为8 bit数据位,1 bit停止位,1 bit偶校验,因此线路控制寄存器的值为1B。
系统工作在中断方式下,允许接收错、发送寄存器空和接收数据就绪中断,因此中断允许寄存器(地址为4001H,选择该地址时线路控制寄存器的 D7=0)的值为07H。
将TL16C750的接收准备好信号(RXRDY)和发送准备好信号(TXRDY)与 DSP系统的外部中断 1(INT1)和中断3(INT3)相连。当 DSP接到串口中断时,先屏蔽掉系统的其他中断请求,然后将RXREADY赋值为1,以便用来判断DSP是否完成了此中断响应。如果键盘没有终止串口通信,则将存入缓冲存储器组的数据上传给上位机。串口通信的中断子程序流程图如图2所示。

3.2 上位机串口通信软件设计
上位机程序使用 Visual C++作为软件开发环境。Visual C++在串口通信方面功能很强,不仅操作简单、代码执行速度快,而且界面设计比较好[5]。使用Visual C++进行串口开发有多种方法,如Windows API通信函数、MSComm ActiveX串行通信控件、Visual C++运行库函数,第三方编写通信类都可以实现串口编程。本设计采用MSComm ActiveX串行通信控件来编写通信程序。
MSComm ActiveX串行通信控件是Microsoft公司提供的简化Windows下串行通信编程的ActiveX控件[6]。它提供了事件驱动方式和查询方式两种处理通信的方式。查询方式是通过检查CommEvent属性值来查询事件和错误,然后进行相应的处理;而事件驱动方式是在串口发生事件或错误时,产生OnComm事件进行相应的处理,它响应及时,可靠性高,因此本文选用事件驱动方式。
首先在VC中建立一个基于对话框的应用程序,在该MFC项目中插入MicrosoftCommunicationControl控件。在使用该控件前,先要对其进行初始化设置,主要包括选择COM口以及设置输入方式、波特率、数据位、检验位、停止位、发送缓冲区大小和接收缓冲区大小等。当然不要忘记打开串口,因为在32 bit Windows中,串口和其他通信设备都被作为文件进行处理,在使用前必须先将其打开。部分初始化程序如下:
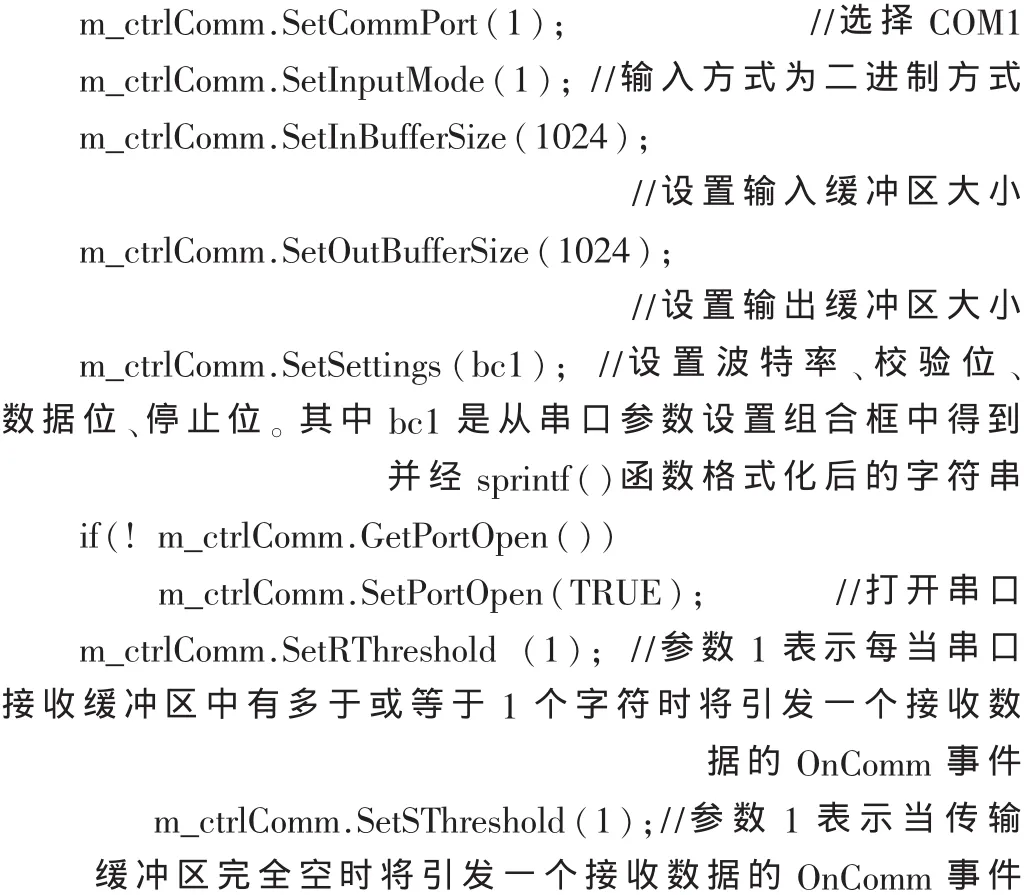
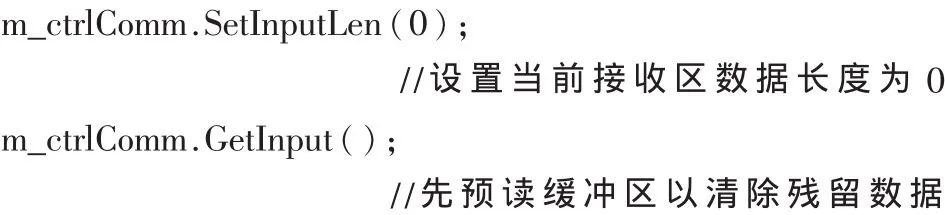
初始化完成后,按照通信协议在查询设备和开始采集按钮所对应的函数 Oncheck()和 Onstart()中编写发送命令的字符串。为了定时发送读指令,在Onstart()函数中添加计时器函数 SetTimer(),当采集结束时,一定要清除该计时器。函数如下:

当接收缓冲器中有数据时,将会触发OnComm事件,因此要在MSComm控件相应的消息响应函数OnOnCommMscomm1()中编写数据处理程序。由于串口通信接收和发送数据类型只能是VARIANT,因此要将数据进行格式转换。将接收到的数据转化成CString类,处理后将其保存到与之相连接的SQL Server 2000数据库的表中,以便在主界面中进行显示和相应数据的处理。
4 串口调试
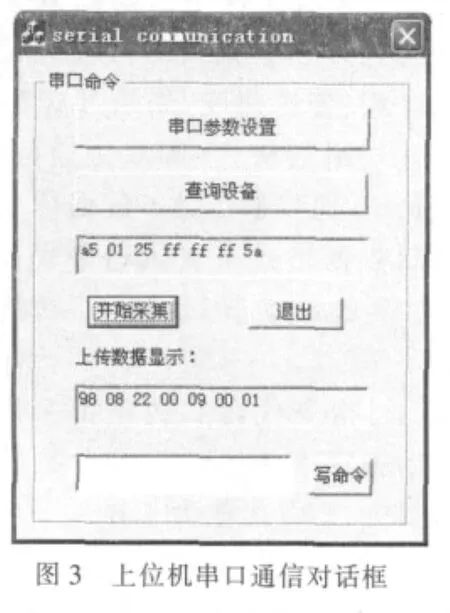
串口属性设计完成后,运行主界面,单击串口设置按钮,进入串口通信界面,运行界面如图3所示。
首先单击串口参数设置按钮,设置串口通信的波特率、检验位、数据位和停止位。波特率选择9600b/s,1 bit偶校验,8 bit数据位,1 bit停止位。设置完成后单击设备查询,上位机将会向下位机发送设备查询命令,下位机收到查询命令后,将返回相同的数据,如图3中的a5 01 25 ff ff ff 5a,就是下位机返回给上位机的数据。上位机接收到该数据,说明上下位机完成握手,数据能在两者之间进行实时传送。
单击开始采集按钮,上位机定时向下位机发送读指令,下位机接收到读命令后,将相关数据上传给上位机。为了更加清楚地查看数据的传输过程,本文在串口对话框中加一个编辑框,用来显示下位机传给上位机的数据,如图3中的98 08 22 00 09 00 01就是下位机上传的数据。其中,0898是电压值,0022是电流值,0009是谐波电流值,01表示保留一位小数,因此转换成十进制电压是 220 V,电流是 3.4 A,谐波电流是 0.9 A。
当需要修改下位机相关参数时,将写命令填写到图3最下边的编辑框中,然后单击写命令按钮,即会向下位机发送修改命令。
为了实现上位机对有源滤波器的监控,本文设计了有源滤波器与上位机的RS-232串口通信,并详细介绍了串口通信的硬件电路、通信协议和软件编程。下位机使用C和汇编语言混合编程,上位机使用Visual C++完成界面设计,并编写MSComm通信控件。通过串口调试可知,该设计能够完成上位机对有源滤波器的实时监控。
[1]曹卫彬.C/C++串口通信典型应用实例编程实践[M].北京:电子工业出版社,2009.
[2]TL16C750 data sheet[DB/OL].[2011-12-16].http://www.icpdf.com/partnoview.asp?id=733855_128973.
[3]王晓丽.基于串口通信的摩托车前照灯检测[J].小型内燃机与摩托车,2009,38(2):66-68.
[4]刘乐善,欧阳星明,刘学清.微型计算机接口技术及应用[M].武汉:华中科技大学出版社,2000.
[5]龚建伟,熊光明.Visual C++/Turbo C串口通信编程实践[M].北京:电子工业出版社,2008.
[6]王春晓,刘海.基于 VB和 MSComm的 APF监控系统设计[J].工业控制计算机,2010,23(12):20-21.
猜你喜欢
现代电子技术(2022年20期)2022-10-15
智能制造(2020年5期)2020-07-03
科技与创新(2018年1期)2018-12-23
通信电源技术(2018年3期)2018-06-26
计算机系统应用(2018年1期)2018-02-07
电子测试(2016年15期)2016-08-31
现代工业经济和信息化(2016年2期)2016-05-17
北京纪事(2016年5期)2016-05-07
火控雷达技术(2016年3期)2016-02-06
广西文学(2015年9期)2015-10-24