
土方作业设备管理虚拟施工模型及仿真分析
2012-02-28 03:55成飞飞李岩松王要武凌贤长
土木与环境工程学报 2012年3期
成飞飞,李岩松,王要武,凌贤长
(哈尔滨工业大学a.管理学院;b.土木工程学院,黑龙江 哈尔滨150090)
土方作业是指与土方施工活动相关的所有作业,受施工活动工作流、信息流和随机性因素等影响,是复杂的动态离散事件[1]。
土方作业设备管理主要以提高生产率、设备利用效率和施工安全性为最终目标,根据既定施工项目选择最优设备方案,进而提高施工生产率和承包商效益,以期达到在既定工期时间内施工设备利用率、生产效率的最优化和施工成本的最小化。通过给定可用设备数量、设备特征参数、施工管理原则、主要影响因素和相关费用等信息,可以用土方作业虚拟施工仿真模型预测土方作业的施工情况、设备生产率、预计完成时间和成本,为土方施工的组织和管理提供可靠依据。
为实现上述目标,在土方施工作业方面已开发了一些仿真模型和方法,预测与作业参数相关的结果和绩效。Kim等[2]开发了基于多Agent仿真系统,通过确定现场环境的动态变化,描述施工设备的特点,模拟土方作业施工现场的设备流量。Hola等[3]用人工神经网络预测土方作业的设备使用率,根据土方作业的执行时间和成本选择最优的设备组合。Hare等[4]用混合整数线性规划模型预测土方作业的施工成本。Liao等[5]通过有效使用约束或非约束资源,利用启发式算法对施工作业的规划、成本预算、施工进度、项目检测与控制等方面进行优化。Marzouk等[6],Wu 等[7],Navon 等[8]将 遗 传 算 法、控制算法或其他仿真技术相结合。Van等[9]提出了一个土方作业的资源分配模型,该模型用智能agents和信念网络来优化模型的性能。Zhang[10]用粒子群算法进行仿真,搜索潜在的设备配置。Prata等人使用Petri网方法,通过仿真来确定装载机和卡车小组的规模,研究还使用随机有色Petri网模型表达推土工作的运行动态性[1]。
大多数土方作业施工仿真方法使用各种智能算法直接对资源、时间、成本等目标进行优化,并不关注土方作业实际工作流的变化,往往不考虑土方作业过程中设备的随机空闲、多功能设备作业的智能调度、个体作业设备的动态性和随机不确定性,这使得仿真结果与现实作业的切合度较低。Prata等人考虑了土方作业过程的动态性,选择装载土方和卡车运输局部作业作为仿真和优化对象,对装载-卡车作业小组进行动态仿真,但所提出的Petri网仿真模型不能对整个作业过程进行仿真优化,也不能对施工过程中出现的典型随机、动态事件进行仿真响应。
为了实现对土方作业施工过程的设备规划调度虚拟精益仿真,在分析研究实际土方作业工作流和施工设备与施工活动之间动态约束关系的基础上,构建了一个通用、易扩展的土方作业Petri网仿真模型 CPNSMEO(Colored Petri net simulation model of earthmoving operations)。与现有土方施工仿真模型相比,该模型描述了土方施工过程工作流与信息流的动态变化,描述了作业设备与施工环境之间的动态约束关系,实现了对施工活动随机性和主要施工影响因素的精益仿真。在CPNTools仿真平台上模拟,对土方作业施工过程的设备规划调度进行动态可视化虚拟仿真。该模型还考虑了土方作业中常见的施工影响因素和设备机械的人工智能调度偏好。最后,通过一个实际土方施工案例,对模型进行说明和验证。
1 土方作业的描述
土方作业的核心活动包括:土方挖掘、施工现场的土方转移、土方装载、土方运输和土方卸载等五项工作。通常使用的设备为挖掘机、铲土机、装载机和卡车。根据施工作业特点,可将施工设备分为挖掘与转移单元、装载单元和运输单元。
挖掘与转移单元是指挖掘机将土方切削、挖掘后,由铲土机将松散的土方转移到土方装卸位置。如果施工场地足够大且卡车可直接进入,松散土方的转移工序可以省略,直接装载挖掘机挖掘出的土方。装载单元是指挖掘处的土方由装载设备装到运载卡车上,装载作业通常由装载机完成。运输单元是指卡车将挖掘的土方按要求运载到指定地点,卸载后返回继续进行运载作业。
挖掘机是可以用于切削和装载作业的高效率机械,由于运营成本高,一般不直接用于装载作业。但当待装载土方量大,或装载的限定时间很短时,使用挖掘机进行装载作业是合理选择。铲土机在土方作业中用于短距离土方转移和现场平整。装载机一般能够完成装载、短距离运输和卸载等土方作业,具有负荷小、成本低和高敏捷性等特点,主要与卡车配合进行土方装载。卡车是最常用的土方运载工具,适合土方中远距离的运输。
在实际土方施工作业过程中,承包商为在限定期限和限定成本范围内完成施工任务,多趋向使用已有的、成本较低的设备,而不是使用理论上最佳的施工设备配置。
2 土方作业虚拟施工仿真模型
2.1 土方作业工作流模型
根据一般土方作业活动工作流和作业设备与作业活动之间的约束关系,本研究构建了土方施工作业工作流模型。模型中主要施工活动和约束关系如下。
1)挖掘机在挖掘作业点进行土方挖掘,施工面的大小限制了同时进行发掘作业的机械数量。挖出的土方临时存放在施工面附近。挖掘机具有挖掘和装载两项功能,现场管理者根据现场实际作业情况对其进行调动,以提高生产率。
2)挖掘作业点附近临时存放的挖出土方由推土机转移到土方装载点附近的土方临时存放地。
3)在装载作业点,施工现场管理者会根据等待装载的卡车数量和待装载土方量考虑是否将挖掘机调动到装载作业点协助装载机同时进行装载作业。装载作业面的大小会影响同时进行装载作业卡车的最大数量,实际工作中不会出现两台以上装载设备同时为一台卡车进行装载作业的情况。
4)完成装载作业的卡车,由现场管理者调度离开施工现场,前往土方卸载场。土方卸载后卡车将返回施工现场的卡车临时停放场,等待作业调度。卡车的工作效率受路况和交通情况影响,道路交通情况的影响一般是分时段周期性的。
图1为土方施工作业的工作流模型。

图1 土方施工作业工作流模型
2.2 土方作业虚拟施工CPN模型
Carl Adam Petri(1962)在博士论文中首次提出了Petri网理论。为了模拟离散系统并行、异步的行为,该方法基于图论,提供了数学公式和图形化的表达。一个Petri网通常包括库所、变迁和弧。每个弧连接了从变迁到库所,或者连接从库所到变迁。托肯驻留在库所上。更多Petri网相关信息请参见文献[11-12]。
CPNSMEO是在有色时间Petri网理论和土方作业工作流模型的基础上构建的,模型的结构和运行的正确性可以通过Petri网的活性和安全性进行验证。模型的数学表达如下:
土方作业Petri网仿真模型可以表达为一个9元组,CPNSMEO= (R,P,T,F,M0,C,G,I,S),其中:
1)R是托肯颜色的多重集;
2)P是n维库所的有限集;
3)T是m维变迁的有限集;
4)F是弧的有限集,记做P∩T =P∩F =T∩F= ∅;
5)M0是初始状态标识;
6)C是颜色函数,其定义是从P到R;
7)G是守卫函数,t∈T;[Type(G(t)=Boolean∧Type(Var(G(t)))■R],其定义是变迁 T 的表达式;
8)I是初始化函数,p∈P:[Type(I(p))]=C(p(a))MS],其定义是从P 到闭环的表达式,p(a)是N(a)的库所,MS是多重集;
9)S(S∈ [0,1])是变迁T与其它变迁发生冲突时被触发的可能性,无冲突时S=1。
CPNSMEO与一般有色Petri网模型不同,CPNSMEO中托肯的颜色是由执行环境决定的,受其他托肯颜色的影响。
3 实例应用
3.1 应用实例及数据收集
应用实例来源于哈尔滨紫金城高层住宅建筑项目。仿真数据来源于与项目经理、现场工程师的访谈和现场观测。该建筑项目总建筑面积为320 000m2,项目涉及:在施工现场挖掘180 000m3自然土方,将土方从施工现场移到15km处的土方放置场。土方平均自然密度是1.53t/m3,疏松密度是1.2t/m3。设备组包括:挖掘机、推土机、装载机和自卸卡车。
受施工场地限制,挖掘施工面最多可设置8个挖掘点,每个挖掘点最多可以设置两台挖掘机同时作业,装载区最多可以设置5个装载点,每个装载点可以最多允许两台装载设备同时装载一辆卡车。在挖掘施工区设有最大容量为2 000m3的临时土方存放点,在装卸区设有最大容量为3 600m3的临时土方存放点。另外,由于施工地点位于市区内,卡车土方运输情况受城市交通情况限制。通常6:00-22:00期间卡车行驶受交通影响较大,22:00-6:00期间卡车受城市交通状况影响较小。
土方作业施工过程中存在着大量的随机不确定性,最主要的不确定性是挖掘机、铲土机、装载机和卡车每次作业的工作时间以及作业土方的装载量。本研究采用模糊三角概率函数模拟施工活动中的不确定性[13]。通过对在不同时间段随机抽取施工设备进行施工活动观测,确保每项土方作业活动总的观测数量均超过100次。对每项土方作业活动现场观测数据随机抽取100个统计样本,使用拉丁超立方法对观测数据进行处理。通过对土方挖掘作业活动随机抽取的50个观测数据对假定概率分布函数进行验证,没有1个检验拒绝假定,这说明收集的数据适合模糊三角概率函数。设备基本参数和观测统计数据参见表1和表2。
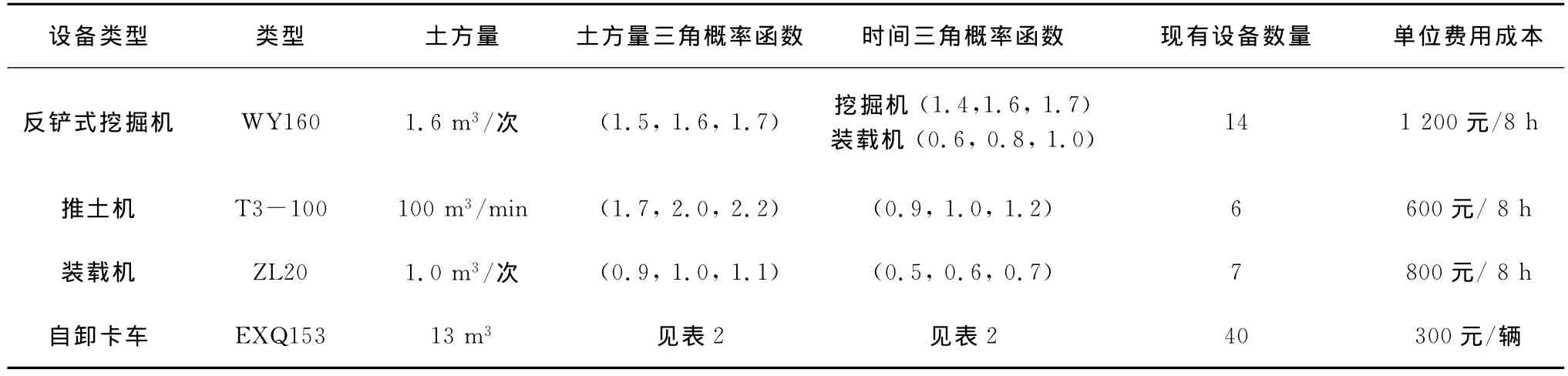
表1 可用设备型号(基本参数)及数量

表2 可用设备型号(基本参数)及数量卡车运行时间的三角概率函数(分钟)
3.2 土方作业虚拟施工仿真实现
在CPNTools仿真平台上实现CPNSMEO模型的应用和仿真。CPNTools可用于有色Petri网的建模、仿真和分析,具有良好的使用界面,便于用户操作,可以实现可视化仿真。
CPNSMEO在CPNTools上的可视化仿真实现如图2所示。
表3说明了模型的主要库所和变迁,其它未在列表中注明的变迁和库所为模型调控和构建的辅助结构。仿真数据均采用表1和表2中现场观测统计后的数据。
库所Pin中的待挖掘土方经过T1(挖掘机)挖掘变迁,将挖出的土方暂存在P1库所中,经过T2(推土机)将施工场地内临时存放的土方移动到P2库所等待装载。P2库所中的土方经过T3-6土方装载仿真模块装载到P8的等待装载卡车中,经过T5运输仿真模块,最终将土方运到弃土场,空卡车返回,形成工作循环。

图2 土方作业有色时间Petri网
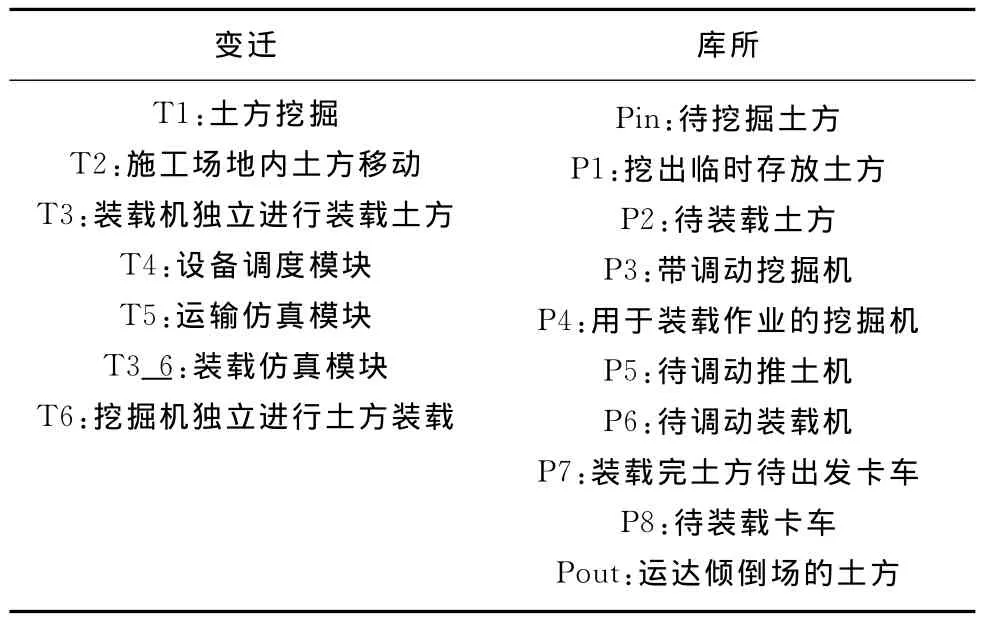
表3 建筑土方作业仿真模型主要变迁说明
在实际土方作业中,现场管理者会根据现场作业情况对施工机械设备和资源进行优化和调控。CPNSMEO模型的T4设备调度模块主要调度控制机理如下:
1)模型每间隔1分钟会对P1、P2中的土方存量和现实时间进行监测,并将监测结果反馈到T4调度模块;
2)如果P1库所中的土方量达到2 000m3暂存(临时存储)上线,挖掘机不再继续工作;P2库所中土方暂存量达到3 600m3时,推土机不再工作;
3)在22:00—6:00时段时,卡车运力增强。当P2中土方暂存量超过3 000m3时,模型将自动调度部分挖掘机到装卸点协助装载机进行装载。在6:00-22:00时段,卡车运力下降。当P1中的土方量小于300m3时,模型将自动将用于装载的挖掘机调回至挖掘点进行挖掘。
CPNSMEO通过T4设备调度模块和相关守卫调度函数,实现了对施工现场智能化的调度仿真。
模型描述了卡车装载过程土方载有量、卡车运输的道路交通因素、挖掘机调动过程的耗时、挖掘机挖掘和装载的不同生产效率。模型还可对施工场地装卸位置最大进入卡车数量、卡车等待点最大卡车等待数、卡车装载最大设备数等施工活动影响因素进行精确表达。
受篇幅限制,模型仿真实现的变量及函数定义略。
3.3 虚拟施工仿真结果分析
表4是施工单位实际设备条件下用传统设备调度管理方法制定的28个设备配置方案。模型仿真时间精度设定为0.1min,土方量仿真精度设为0.1m3。将所有28个仿真方案应用到土方作业仿真模型中进行仿真分析,仿真结果见表4和图4。
图3为应用实例的仿真结果输出,横坐标为作业时间,单位为d;纵坐标为作业成本,单位为元。

图3 应用实例的仿真结果输出
通过分析图4应用实例仿真结果,可以找到在所有28项仿真方案中项目时间最短、成本最小、时间和成本同时优化的3个仿真方案,分别是:方案28、方案21和方案26。由于表4的28个仿真方案省略了所有挖掘机为奇数的方案,因此需要对与方案28、21、26相邻的挖掘机数量为奇数的设备配置方案进行仿真分析。验证仿真结果,获得不同优化目标的设备配置优化方案,如表5所示。

表5 不同优化目标的设备配置
以仿真方案28的设备配备数量为基础,保持其中3种施工设备资源配置不变,对第4种施工设备资源数量进行单独调整,按照新的配置方案进行仿真分析,获得图4。
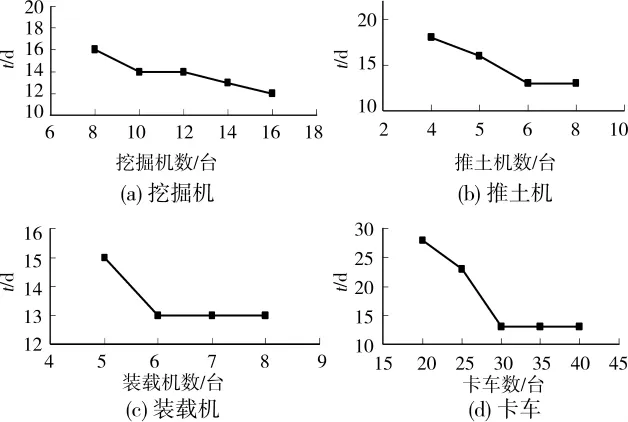
图4 土方作业不同数量的设备对生产率的影响
在实际施工中,卡车的费用取决于实际土方运输的车次总量,一般为固定值。由图5(d)可知:本施工方案卡车的配置临界值为30台,在实际施工现场配置了40台卡车以确保不影响其他施工环节的生产率。
从图5(a)、(b)、(c)可看出,在现有施工条件下,挖掘机数量对应用实例中土方作业生产率的影响是持续增强的。推土机和装载机数量增加会提高土方作业生产率,但当推土机数量超过6台、挖掘机数量超过7台时,施工设备数量的增加将不再会提高土方作业的生产率。综上,对于本土方作业实例,挖出土方的施工场内移动和土方装载是影响整个土方作业过程的关键过程。推土机和装载机数量变化对土方作业生产率影响的要大于卡车与挖掘机的数量变化对土方作业生产率的影响。
3.4 虚拟施工模型验证
如不对仿真模型进行验证和校验,就不能确定模型是否能正确执行,仿真结果是否有效。哈尔滨紫金城高层住宅建筑项目土方施工作业设备的实际施工配置方案为:挖掘机13台、推土机6台、装载机7台,实际工作时间为累计15d(期间因大雨暂停施工两次)。应用相同设备配置方案进行50次仿真,工期的仿真结果为13.82d,模型的工期仿真偏差为7.86%,成本偏差为4.32%,较施工单位应用确定性模型计算预测的13d工期要精确5.47%。经与现场工程师和管理人员访谈,对模型仿真活动执行过程和仿真参数设定进行了校验,分析认为以下3个方面是导致仿真模型偏差的主要因素。
1)观测统计数据有80%来源于白天的观测点。虽然施工人员采用8h/班工作制,但施工人员白天的工作效率相对夜里略高,这导致应用于模型的实测仿真参数略高于现实值。
2)实证项目的土方作业由于大雨被迫中断两次,大雨使实际复工时设备的生产率要短时偏低于统计观测数据,这也导致模型仿真时间短于实际工期。
3)实际作业过程中会发生对机械设备一些简单的日常维护,如加油、部件常规检查等活动。这些活动并没有在仿真模型中体现,但也导致实际工期的延长。
4 结论
在分析研究实际土方作业工作流和施工设备与施工活动动态约束关系的基础上,构建了一个通用、易扩展的土方作业动态虚拟施工Petri网仿真模型。模型可以实现在多个复杂施工限定条件下对土方作业施工过程的动态、可视化仿真。
与其他土方作业仿真模型相比较,该模型的优点总结如下:
1)更加清楚地描述了土方施工过程工作流与信息流的变化,描述了各种作业设备与施工环境(施工限制条件)之间的动态约束关系。
2)更精益地实现了对施工活动随机性和主要施工影响因素的动态可视化仿真,构建的模型更加贴近实际土方施工作业,仿真结果与实际土方施工的切合度更高。
3)模型可以模拟不同生产率设备在同一施工过程的智能调度,使得模型对多种施工设备混合施工的动态过程有更好的描述能力和仿真能力。
4)模型具有更强的扩展性,可通过对变迁、托肯、守卫函数的修改,将模型应用到不同类型的土方施工作业对象。
[1]Prata B A,Júnior N B,Barroso G C.A stochastic colored petri net model to allocate equipments for earth moving operations[J].ITcon,2008,13:476-490.
[2]Kyoungmin K,Kyong J K.Multi-agent-based simulation system for construction operations with congested flows[J].Automation in Construction,2010,19(7):867-874.
[3]Bozena H,Krzysztof S W.Estimation of earthworks execution time cost by means of artificial neural networks[J].Automation in Construction,2010,19(5):570-579.
[4]Warren L H,Valentin R K,Yves L.Models and algorithms to improve earthwork operations in road design using mixed integer linear programming [J].European Journal of Operational Research,2011,215(2):470-480.
[5]Warren L T,Egbelu P J,Sarker B R,et al.Metaheuristics for project and construction management:A state-of-the-art review[J].Automation in Construction,2011,20(5):491-505.
[6]Marzouk M M,Omar O A,Abdel H M S,et al.An optimization algorithm for simulation-based planning of low-income housing projects[J].Journal of Advanced Research,2010,1(4):291-300.
[7]WU I C,Borrmann A,Ert U,et al.Bridge construction schedule generation with pattern-based construction methods and constraint-based simulation[J].Advanced Engineering Informatics,2010,24(4):379-388.
[8]Navon R,Goldschmidt E,Shpatnisky Y.A concept proving prototype of automated earthmoving control[J].Automation in Construction,2004,13(2):225-239.
[9]Van T Anthony A,Abourizk S M.Simulation modeling decision support through belief networks [J].Simulation Modelling Practice and Theory.2006,14(5):614-640.
[10] HONG Z.Multi-objective simulation-optimization for earthmoving operations[J].Automation in Construction,2008,18(1):79-86.
[11]Jensen K.Coloured petri nets:basic concepts,analysis methods and practical use-Volume 2:basic concepts[M].Springler-Verlag.1997.
[12]Vander A W M P.The application of Petri nets to workflow management [J].Journal of Circuits,Systems and Computers,1998,8(1):21-66.
[13]Zimmermann H J.模糊集合论及其应用[M]:4版.北京:世界图书出版公司,2011.
猜你喜欢
建材发展导向(2022年4期)2022-03-16
装备制造技术(2020年4期)2020-12-25
建材发展导向(2019年5期)2019-09-09
建材发展导向(2019年5期)2019-09-09
汽车观察(2018年12期)2018-12-26
小学生必读(低年级版)(2018年9期)2018-12-13
产品可靠性报告(2017年6期)2017-09-05
儿童故事画报(2017年4期)2017-05-26
有色金属设计(2015年2期)2015-02-28
全球定位系统(2015年4期)2015-02-28
