基于扩展孔径ESPRIT算法的高精度无模糊二维DOA 估计
2012-02-22 08:07:32顾陈何劲李洪涛朱晓华
兵工学报 2012年1期
顾陈,何劲,李洪涛,朱晓华
(南京理工大学 电子工程系,江苏 南京210094)
0 引言
二维DOA 估计是阵列信号处理的一个重要研究领域,在雷达、声纳、通信等领域有广泛的应用。基于子空间类的算法由于具有高分辨性能及计算简单的特性,在过去的30年里受到了广泛的研究。目前应用于DOA 估计研究领域中方法主要有多重信号分类法(MUSIC)[1]和旋转不变子空间法(ESPRIT)[2]等。文献[3]将MUSIC 算法应用于二维DOA 估计中,这是一种产生渐近无偏估计的高分辨率特征结构法,但是该算法需要进行二维搜索,运算量巨大。以ESPRIT 为代表的测向算法不用进行谱峰搜索可以有效的降低运算量,因而被广泛的应用于二维及多维DOA 估计中。文献[4]研究了基于三角形阵列的二维ESPRIT 算法和配对算法,文献[5]提出一种无需搜索的低复杂度二维ESPRIT 相干分布源解耦估计算法,文献[6]研究了基于分数阶傅里叶域滤波的LFM 信号二维ESPRIT 算法,文献[7]提出了一种基于总体最小二乘的相位平均ESPRIT 方法,文献[8]提出了一种适用于任意阵列基于2D-ESPRIT 的DOA 频率联合估计算法,文献[9]提出了基于ESPRIT 算法的等距二元矢量水听器直线阵的二维DOA 估计方法,减少了矢量水听器的冗余阵元。ESPRIT 算法虽然有运算量小的优点,但其估计精度较低。增加传感器之间的距离扩展阵列孔径可有效地提高DOA 估计精度,但ESPRIT 算法与其他算法一样,也同样需要传感器间的距离小于半波长避免得到模糊的估计值,当传感器间的距离大于半波长时可以增加波达方向估计的精度,但是会得到一系列循环模糊的角度估计值。
为解决上述DOA 估计的模糊问题,文献[10-11]分别提出了采用声学矢量传感器阵列和电磁矢量传感器阵列的二维DOA 估计算法,其基本思想是利用声学矢量传感器和电磁矢量传感器固有的DOA 信息对扩展孔径带来的模糊DOA 估计进行解模糊,以提高DOA 估计的精度。本文利用传统的标量传感器,提出一种基于双平行扩展阵列孔径的ESPRIT 算法(EA-ESPRIT).该算法可视为文献[12]中提出的传播算子算法的基于ESPRIT 算法的改进。同时,本文在给出EA-ESPRIT 算法的基础上,分析了特征值相同情况下信号角度的配对方法。最后,论文通过计算机仿真结果验证了提出算法的有效性。
1 信号模型
假设由4L +1 个天线阵元组成的x-y 平面上的双平行均匀线阵,如图1所示。4L +1 个天线阵元分为2 个子阵,子阵X 平行于x 轴,X1为其中第1~L 个传感器,X2为其中第0~L-1 个传感器,X3为其中第L+1~2L 个传感器;子阵Y 平行于y 轴,Y1为其中第1~L 个传感器,Y2为第0~L-1 个传感器,Y3为第L +1~2L 个传感器。子阵X 传感器间沿x 轴的距离和子阵Y 传感器间沿y 轴之间的距离分别为Δx和Δy,其取值远大于半波长,子阵X 的传感器间沿y 轴的距离和子阵Y 传感器间沿x 轴的距离分别为dy和dx,其取值小于等于半波长。
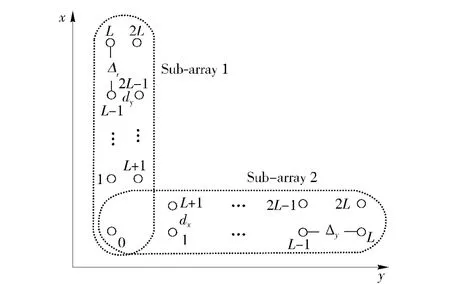
图1 阵列几何结构Fig.1 Array geometry illustration
假设有K(K <L)个远场窄带非相干点信号入射到该阵列,入射信号的DOA 分别是{θ1,φ1},…,{θK,φK}.以阵列X 的1 号传感器作为基准,信源在基准点的复包络分别为s1(t),…,sK(t),则阵列X1在t 时刻的接收信号矢量可表示为
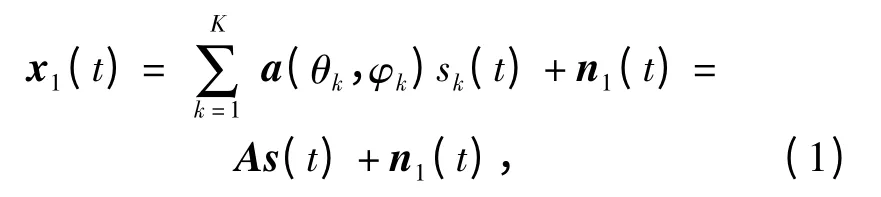
其中:s(t)=[s1(t),…,sK(t)]T为信号矢量;A =[a(θ1,φ1),…,a(θK,φK)]为子阵X1的导向矢量;a(θk,φk)=[a1(θk,φk),…,aL(θk,φk)]T,al(θk,φk)=ej2π/λ(xluk+ylvk)为第k 个独立信源和第l 个传感器之间的空间相位因子,其中uk=u(θk,φk)=sinθkcosφk,vk=v(θk,φk)=sinθksinφk为x 轴和y 轴的方向余弦,(xl,yl)为第l 个传感器的方位;n1(t)=[n1(t),…,nL(t)]T为子阵X1的接收噪声,本文假设每个阵元的噪声都为相互独立的白色高斯随机过程。
此时,阵列X2和阵列X3的在t 时刻的接收信号矢量可表示为

其中:n2(t)、n3(t)为子阵X2、X3的加性高斯白噪声,Φu和Φv为K×K 的对角阵,其表达式分别为

同样,我们可推导出阵列Y1、Y2与Y3在t 时刻的接收信号矢量为
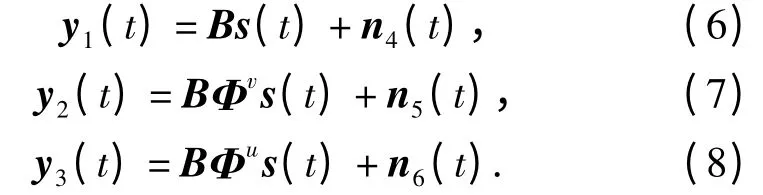
其中:n4(t)、n5(t)和n6(t)分别为阵列Y1、Y2和Y3的加性高斯白噪声;B 的结构与A 类似,Φv、Φu为K×K 的对角阵

由式(4)、式(5)和式(9)、式(10)可知,信号的方向余弦信息就包含于对角阵Φu、Φv和Φv、Φu中,因此可以由对角阵的估计值得到信号的二维DOA 估计值。
2 基于ESPRIT 的二维DOA 扩展孔径算法
2.1 模糊x 轴方向余弦与非模糊y 轴方向余弦估计
首先将子阵X 的3 个阵列合并,即

求上式的协方差矩阵,并对其进行特征值分解可得

其中:Es,x为子阵X 协方差矩阵的大特征值对应特征矢量张成的信号子空间;En,x为小特征值对应特征矢量张成的噪声子空间。由于信号子空间Es,x与导向矢量矩阵A 张成相同的空间,因此存在唯一的一个非奇异阵T,使得
因此由上式可得

在实际中,从有限的快拍中得到Es,x的估计值,此时式(14)不再成立,需要对其进行近似。本文采用最小二乘法(LS:Least Squares)进行近似,得到的Ψ 估计值为

由于dy≤0.5λ,因此由Ψv得到的y 轴的方向余弦估计为不模糊的

由式(14)可知Ψu和Ψv具有相同的特征向量矩阵,但实际计算中两个特征值分解是独立进行的,因此特征向量的排列顺序是不同的,所以 需要对特征值的顺序进行调整才能解出参数。设Tu和Tv分别为Ψu和Ψv特征值分解所得的特征向量矩阵,计算特征向量矩阵的乘积T-1vTu,假设ik为乘积Tv-1Tu第k 行中绝对值最大的元素。这样,Tv的第k 列特征向量与Tu的第ik列特征向量为同一信号的,因此通过该方法来调整Ψu和Ψv的特征值顺序得到第k 个信号配对的方向余弦估计
2.2 非模糊的x 轴余弦估计与模糊的y 轴余弦估计
求非模糊的x 轴方向余弦与模糊的y 轴方向余弦估计过程与上一节的方法类似,这里略去求解过程,只给出具体的估计值如下:
由于dx≤0.5λ,因此由Ψu得到的x 轴的方向余弦估计为不模糊的

随后,构造由Ψv和Ψu特征值分解所得的特征向量矩阵的乘积(Fu)-1Fv,由于同一信号对应Fu和Fv的特征向量是完全相关的,因此由乘积的每一行中绝对值最大的一个元素的矩阵坐标 来调整Ψv和Ψu中对应的元素顺序,可得到配对的方向余弦估计值。
2.3 方向余弦解模糊算法

其中,vl,k和表示为

类似的,x 轴的方向余弦为

其中,
最后,由以上得到解模糊后的模糊方向余弦估计值,得到 第k 个信号的二维DOA 估计值为

2.4 特征值相同情况下EA-ESPRIT 的配对算法
本节将研究特征值相等情况下EA-ESPRIT 算法的配对方法。当矩阵Ψ 存在相等或近似相等的ESPRIT 特征值时,存在不唯一的矩阵T 或F.这就说明不能再根据特征矢量进行方向余弦的配对。当阵列传感器间距大于半波长时,特征值相等问题将会变得显著。以Ψu具有相同特征值为例,即使信号源的方向余弦相差很大,u1≠u2,但如果u1=u2±此时,e-j2πΔxu1/λ= e-j2πΔxu2/λ,同样会造成特征值相等问题。对此,本节采用一种新的基于子空间正交原理的配对方法,该算法利用子空间之间的正交关系构造代价函数,而无需利用Ψu的特征矢量,因此在Ψu具有相同特征值的情况下也能正确的得到配对的估计值。
对于子阵X 的阵列X1与X3,令z(t)为

求z(t)的协方差矩阵,并对其进行特征分解为

又令C 为

式中,k1,k2∈[1,K].构造代价函数为

当k1=k2,即x 轴与y 轴方向余弦为同一信号时,导向矢量与噪声子空间正交,代价函数F 值最小,此时可得到配对的与
类似的,当Ψv有相同的特征值时,可以对子阵Y 用上述方法,得到配对的与因此,该配对算法可以使EA-ESPRIT 算法在特征值相同情况下时也能得到正确的方向余弦估计值,下面用计算机仿真进行算法有效性验证。
3 计算机仿真
假设有两个等功率窄带非相关信号入射到图1所示天线阵中,天线阵的参数L =6,因此共有25 个传感器。本文通过计算机仿真实验来验证算法的性能。
实验1 通过实验分析传感器之间距离变化对EA-ESPRIT 算法性能的影响。本文提出的EA-ESPRIT 算法阵列模型如图1所示,传感器之间的距离为:dx=dy=0.5λ,Δx=Δy=- Δ,两个信号的方向余弦分别为u1=0.4,v1=0.7 和u2=0.15,v2=0.5,信噪比为20 dB.实验为500 次Monte Carlo 实验,快拍数N =700.图2为信号的方向余弦参考估计与解模糊后的方向余弦估计的均方根误差(RMSE)随传感器之间的距离Δ 变化的对比图。由图2可知,Δ 由1 倍波长变化为25 倍时,参考估计的RMSE 随传感器间距的增大保持不变,这一点是与理论相符的,表明了参考估计是低精度无模糊的。而解模糊估计的RMSE 随传感器间距的增大逐渐降低,且本文提出的解模糊算法的RMSE 值比参考算法小,可有效的提高估计精度。
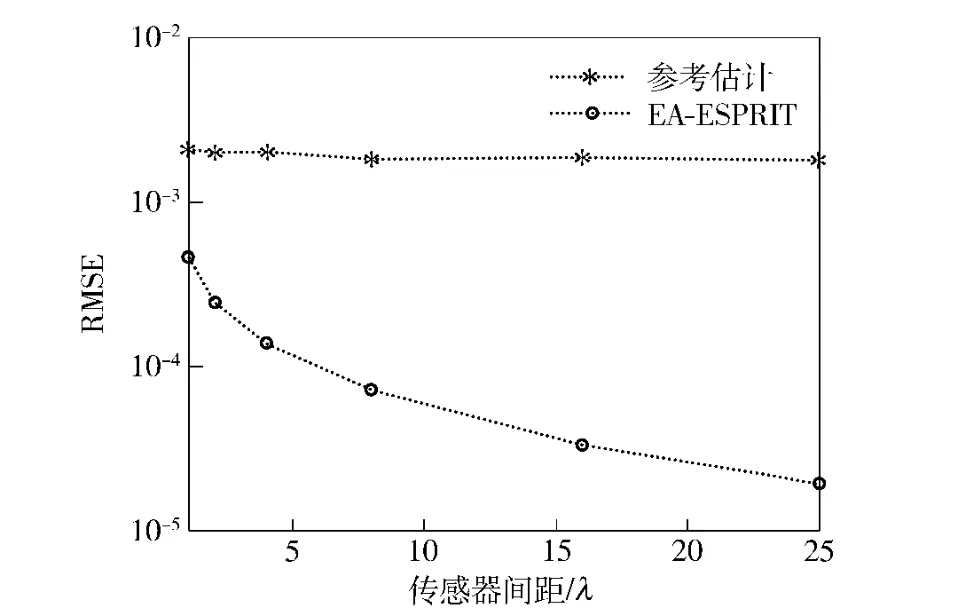
图2 EA-ESPRIT 解模糊算法与参考算法方向余弦估计的均方根误差随传感器距离变化对比图Fig.2 RMSE of DOA estimation of EA-ESPRIT algorithm and reference algorithm againstinter-sensor spacing
实验2 通过实验分析信噪比变化对EA-ESPRIT 算法性能的影响。传感器之间的距离为:dx=dy=0.5λ,Δx=Δy=8λ,两个信号的方向余弦分别为u1=0.4,v1=0.7 和u2=0.15,v2=0.5.实验为500 次Monte Carlo 实验,快拍数为1 000.图3为信号的方向余弦参考估计与解模糊后的方向余弦估计的均方根误差(RMSE)随信噪比变化的对比图。由图3可知,参考估计与解模糊估计的RMSE 随信噪比的增加而逐渐降低,且本文提出的EA-ESPRIT 算法的RMSE 值比参考算法小,在各个信噪比条件下性能均优于参考估计算法。需要指出,当信噪比不低于10 dB 时,提出的算法可以明显改进DOA 估计的精度。因此,提出的算法在信噪比不是很低,快拍数不是很少的应用背景下是一种有效的二维DOA 估计算法。
实验3 通过实验,比较特征值相等情况下EAESPRIT 算法的传统配对算法[10-12]与本文提出的基于子空间正交配对算法性能对比。天线阵由25 个传感器呈双平行阵组成,传感器之间的距离为:dx=dy=0.5λ,Δx=Δy=5λ,两个信号的方向余弦分别为u1=0.4,v1=0.6 和u2=0.5,v2=0.6,信噪比SNR=10 dB.实验为50 次Monte Carlo 实验,快拍数为200.图4为传统配对算法与本文提出的配对算法性能对比图。由图可知,当特征值相等时,传统配对算法已不能得到有效的估计,而基于子空间正交的配对算法能有效的估计信号的DOA.
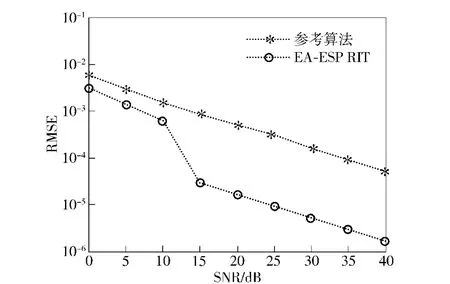
图3 EA-ESPRIT 解模糊算法与参考算法方向余弦估计的均方根误差随信噪比变化对比图Fig.3 RMSE of DOA estimation of EA-ESPRIT algorithm and reference algorithm against SNRs
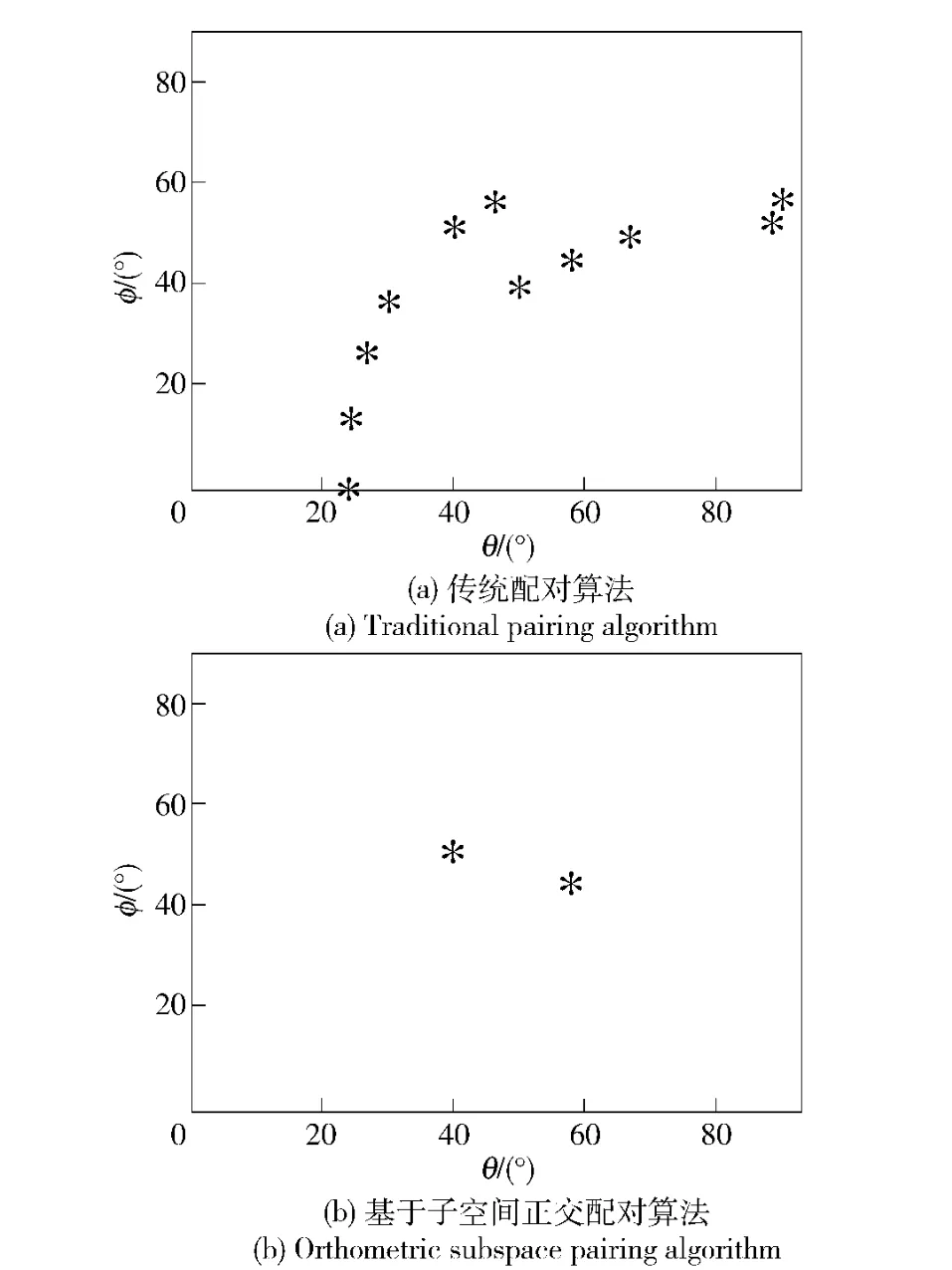
图4 特征值相等时配对算法性能对比图Fig.4 DOA estimation of the different pairing algorithms for the equivalent eigenvalues case
4 结论
本文提出了一种适用于扩展孔径的ESPRIT 算法。该算法利用传感器之间距离远大于半波长的天线阵列构成双平行阵来扩展孔径,然后采用ESPRIT算法估计波达方向,最后以非模糊但低精度的方向余弦来解高精度但模糊的方向余弦。在给出EAESPRIT 算法的基础上,本文还分析了特征值相同情况下基于子空间正交的信号角度配对新方法。本文分别将EA-ESPRIT 算法与传统ESPRIT 算法、基于子空间的配对新算法与传统配对算法进行对比,结果表明本文提出的算法性能均优于传统算法。
References)
[1] Cheng Q,Hua Y.Further study of the pencil-MUSIC algorithm[J].IEEE Trans.Aerosp.Electron.Syst.,1996,32(1):284-299.
[2] Roy R,Kailath T.ESPRIT-estimation of signal parameters via rotational invariance techniques[J].IEEE Trans.Acoust.Speech Signal Process.,1989,37(6):984-995.
[3] Chan A,Litva J.MUSIC and maximum likelihood techniques on two-dimensional DOA estimation with uniform circular array[J].Proceedings of the IEEE,Institute of Electrical and Electronics Engineers,Sonar and Navigation,1995,142(3):105-114.
[4] Kuroda T,Kikuma N,Inagaki N.DOA estimation and pairing method in 2D-ESPRIT using triangular antenna array[J].Electronics and Communications in Japan,2003,86 (6):59-68.
[5] Guo X,Wan Q,Yang W.Low-complexity 2D coherently distributed sources decoupled DOA estimation method[J].Science in China(Series F:Information Sciences),2009,39(8):859-865.
[6] 杨小明,陶然.基于分数阶Fourier 变换和ESPRIT 算法的LFM 信号2D 波达方向估计[J].兵工学报,2007,28(12):1438-1442.YANG Xiao-ming,TAO Ran.2D DOA estimation of LFM signals based on fractional Fourier transform and ESPRIT algorithm[J].Acta Armamentarii,2007,28(12):1438-1442.(in Chinese)
[7] Strobach P.Total least squares phased averaging and 3-D ESPRIT for joint azimuth-elevation-carrier estimation[J].IEEE Trans Signal Process,2001,49(1):54-62.
[8] 孙晓颖,陈建,林琳.基于时空处理的频率与二维DOA 联合估计算法[J].通信学报,2009,30(8):39-44.SUN Xiao-ying,CHEN Jian,LIN Lin.Joint signal carrier frequency and 2D DOA estimation method based on space-time processing[J].Journal on Communications,2009,30(8):39-44.(in Chinese)
[9] 邓大新,邓大比,黄滨,等.采用等距二元矢量水听器直线阵的二维波达方向估计[J].兵工学报,2006,27(6):1023-1026.DENG Da-xin,DENG Da-bi,HUANG Bib,et al.Direction of arrival estimation using a uniform line array of two-component vector hydrophones[J].Acta Armamentarii,2006,27(6):1023-1026.(in Chinese)
[10] Wong K T,Zoltowski M D.Extended-aperture underwater acoustic multi-source azimuth/elevation direction-finding using uniformly but sparsely spaced vector hydrophones[J].IEEE J Oceanic Eng,1997,22(10):659-672.
[11] Zoltowski M D,Wong K T.ESPRIT-based 2-D direction finding with a sparse uniform array of electromagnetic vector sensors[J].IEEE Trans Signal Process,2000,48(8):2195-2204.
[12] He J,Liu Z.Extended aperture 2-D direction finding with a twoparallel-shape-array using propagator method[J].IEEE Antennas Wirel Propag Lett,2009,8:323-327.
猜你喜欢
数学物理学报(2021年5期)2021-11-19 07:01:12
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19 08:38:40
中学生数理化·高一版(2019年12期)2019-12-31 06:52:24
当代石油石化(2018年1期)2018-08-10 06:50:54
中国钢铁业(2018年6期)2018-07-26 06:55:00
中学数学杂志(高中版)(2016年6期)2017-03-01 18:53:58
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:40
职业技术(2015年8期)2016-01-05 12:16:46
东北电力大学学报(2015年1期)2015-11-13 05:20:25
声学技术(2014年1期)2014-06-21 06:56:26