给水调节阀自动控制效果的优化
2012-02-03 08:45俞利锋
自动化仪表 2012年8期
俞利锋
(浙江胜利热电有限公司,浙江 绍兴 312000)
给水调节阀自动控制效果的优化
俞利锋
(浙江胜利热电有限公司,浙江 绍兴 312000)
为优化锅炉给水调节阀自动控制的效果,对影响给水调节阀控制效果的参数测量的精确性、汽包水位的动态特性、基本的控制原理、参数处理和设备选用的合理性进行了分析研究。对参数的补偿修正、控制策略的优化、参数的合理滤波以及设备的合理选型等影响自动控制效果的因素进行了优化处理。实践表明,通过一系列的优化处理既能优化自动控制的效果,又能延长设备使用寿命。
给水调节阀 自动控制 参数测量 可控性 优化
0 引言
虽然在电力生产中,工业锅炉汽包水位的自动控制早已得到应用,但是在实际使用中,特别是负荷调节频繁的热电产业,由于受到各种因素的干扰和影响,自动控制的效果较差。汽包水位不能稳定控制或控制在合理范围之内,影响了锅炉的蒸汽品质和锅炉的安全运行[1]。如果汽包水位的控制改成手动,则增加了运行人员的劳动强度。汽包水位的不稳定控制,又会使电动调节阀频繁动作,这样容易使执行机构的机械部分损伤,影响设备性能以及使用寿命。为优化锅炉给水调节阀的自动控制效果,需要对以下几方面进行分析研究和合理处理。
1 控制系统优化处理
1.1 参数的补偿修正
参数测量的精确性是提高锅炉给水调节阀自动控制效果的基础。在汽包水位的自动控制中,汽包水位、主汽流量和给水流量这些参数直接参与汽包水位的自动控制。而这些参数特性是随着介质温度、压力的改变而改变。如果不进行补偿修正,参数的测量值与真实值之间就会存在很大的偏差,从而影响汽包水位自动控制的效果。因此,必须进行补偿修正或合理处理。
1.1.1 汽包水位的补偿修正
在汽包水位、主汽流量和给水流量这3个参数中,汽包水位被测介质的量程小,所对应单位的电信号值小,导致其测量的分辨率低。
如果不对汽包水位进行补偿修正,只要汽包水位参数发生微小变化,那么误差就会放大,使其测量处于失准状态。在锅炉汽包水位的测量中,一次部件一般利用双室平衡容器或单室平衡容器。无论利用哪种平衡容器,要提高参数的精确性,必须对汽包水位进行温度和压力的补偿。
以双室平衡容器为例,为简化测量的复杂性,对温度的补偿通常根据《电力建设施工及验收技术规范(热工仪表及控制装置篇)》的要求和设计规范对双室平衡容器的外面进行保温,使里面的汽、水更接近于饱和蒸汽和饱和水[2]。
对于压力的补偿则运用式(1),然后再对(ρW-ρS)与汽包压力P进行拆线函数运算,这样就提高了汽包水位测量的精确性[3]。

式中:h为水位;L为汽包水位测量总高度;h0为汽包水位测量总高度的一半;ΔP为差压;ρW为饱和水密度;ρS为饱和蒸汽密度;g为重力加速度。
1.1.2 主汽流量的补偿修正
对于过热蒸汽而言,只要压力、温度发生变化,其蒸汽密度必定发生变化。为了能够比较准确地测量主汽流量,一般使用流量喷嘴作为差压式流量计的测量设备[4]。通过DCS组态软件对主汽流量进行温压补偿,得到的主汽流量测量值精确性很高,几乎等于真实值。
1.1.3 给水流量的补偿修正
对于给水流量而言,由于水介质随温度和压力的改变对水流量的影响并不是很大,无须进行温压补偿,只要设计流量装置时按照接近的原则进行制造即可。
通过上述参数修正处理,能提高参数测量的精确性,从而为自动控制效果的优化提供基础。
1.2 控制策略的优化
要提高给水调节阀的自动控制效果,还要优化自动控制的策略。首先需要了解参数的动态特性、PID的控制原理以及实际运行方式,才能确定汽包水位的控制方案以及调整PID控制和前馈控制的系数。
1.2.1 动态特性分析
由汽包水位的物理特性可知,只要汽包中的储水量和水面下气泡容积发生变化,汽包水位就会受到影响。而锅炉的蒸发量、给水流量和燃烧工况变化是影响水位变化的主要因素。
当给水流量在t1时刻突然增加ΔW后,给水流量虽然大于蒸发量,但由于给水温度比汽包内饱和水的温度低,给水吸收了原有饱和水中的部分热量,使水面下气泡容积减小,所以扰动初期水位不会立即升高。当水面下气泡容积的变化过程逐渐平衡时,水位就反映出由于汽包中储水量的增加而逐渐上升的趋势。最后当水面下气泡容积不再变化时,由于进、出流量不平衡,水位将以一定的速度上升。给水流量扰动下的汽包水位曲线图如图1所示。
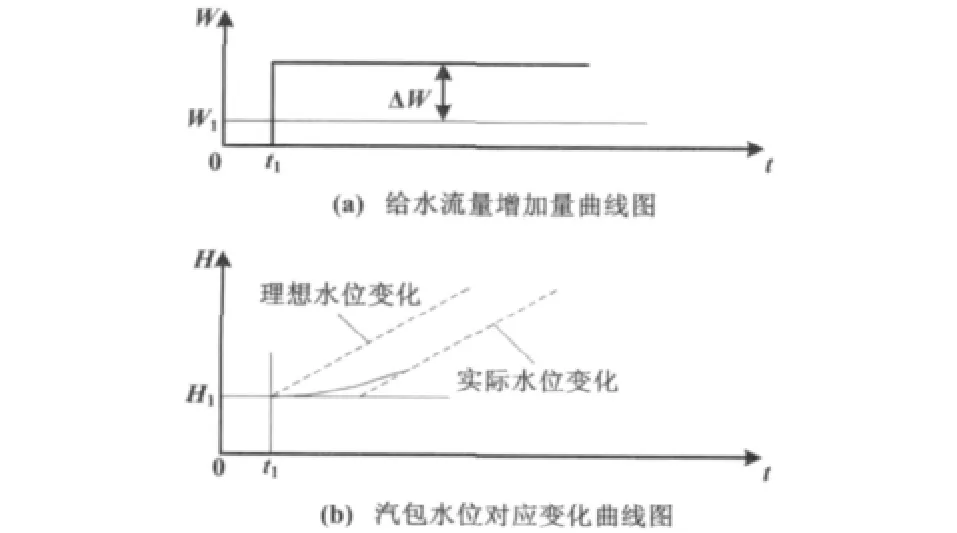
图1 给水流量扰动下汽包水位曲线图Fig.1 Curves of drum water level disturbed by feedwater flow
在燃料不变的情况下,主汽流量瞬间突然增加,必然导致汽包压力下降,汽包内水的沸腾突然加剧,水中气泡迅速增加,将整个水位抬高形成虚假水位。经过一个惯性后,由于蒸发量大于给水流量,汽包水位逐渐呈下降趋势。主汽流量扰动下的汽包水位曲线图如图2所示。
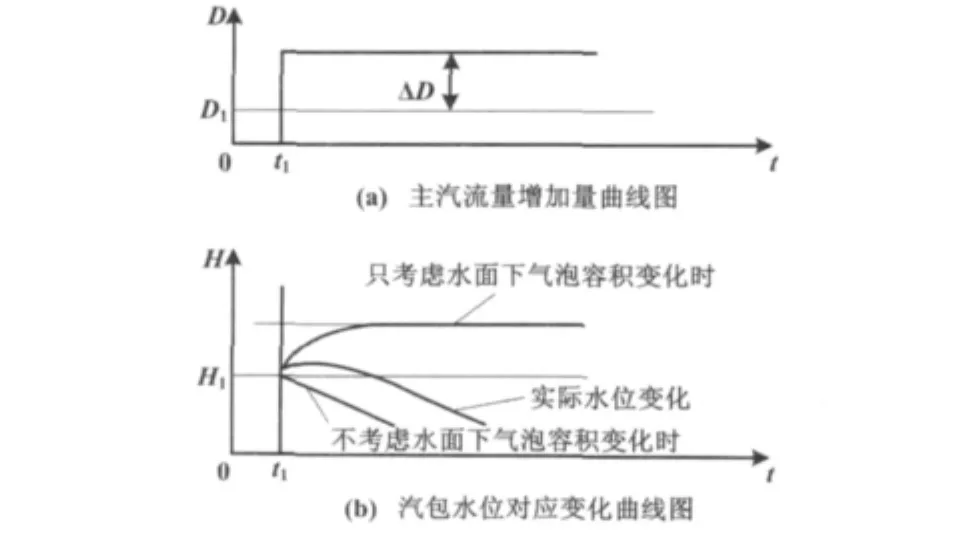
图2 主汽流量扰动下汽包水位曲线图Fig.2 Curves of drum water level disturbed by main steam flow
当蒸发量和给水流量不变时,增加锅炉的燃料同样也会形成虚假水位,但它的影响比突然增加蒸发量要小。因此,要消除来自汽包水位的内部扰动和外部影响,就需要采用一个合适的PID调节控制方案。
1.2.2 PID控制原理
PID控制是比例、积分、微分控制,它是一种基本的控制方式[5]。
比例调节作用是按比例反映系统的偏差,系统一旦出现偏差,比例调节立即产生作用以减少偏差。比例作用大,可以加快调节,减少误差,但是过大的比例,会使系统的稳定性下降,甚至造成系统的不稳定。
积分调节作用是使系统消除稳态误差,提高无差度。有误差,积分调节就进行,直至无误差,积分调节才停止。
积分作用的强弱取决于积分时间常数Ti,Ti越小,积分作用就越强,反之Ti越大,则积分作用弱。加入积分调节可使系统稳定性下降,动态响应变慢。积分作用常与另外两种调节规律结合,组成PI调节器或PID调节器。
微分作用反映系统偏差信号的变化率,具有预见性,能预见偏差变化的趋势。因此,微分调节能产生超前的控制作用,即偏差还没有形成之前已被消除,可以改善系统的动态性能。在微分时间选择合适的情况下,可以减少超调和调节时间。微分作用对噪声干扰有放大作用,因此过强的加微分调节,不利于系统抗干扰。
微分反映的是变化率,当输入没有变化时,微分作用输出为零。微分作用不能单独使用,需要与另外两种调节规律相结合,组成PD或PID控制器。
1.2.3 控制方案的确定
热电联产行业的负荷调节没有火电行业的负荷调节那么稳定。在正常运行时,锅炉的主汽流量随着用户用热的变化而不断变化,如果仅用单冲量或双冲量进行控制,不利于汽包水位的自动控制。因此,为优化汽包水位的自动控制,除了PID串级控制,还要加上主汽流量的前馈控制。
在实际控制中,主汽流量受负荷、燃烧工况等诸多因素的影响,给水流量受给水压力、调节阀等因素的影响,导致汽包水位控制复杂。为解决这些实际难题,把汽包水位作为主控信号,主汽流量作为前馈信号,给水流量作为反馈信号,构成汽包水位自动控制系统。引入主汽流量前馈信号,可以消除“虚假水位”现象对自动控制的不良影响;引入给水流量反馈信号,可以消除给水侧扰动对自动控制的不良影响[6]。
汽包水位三冲量控制策略示意图如图3所示。
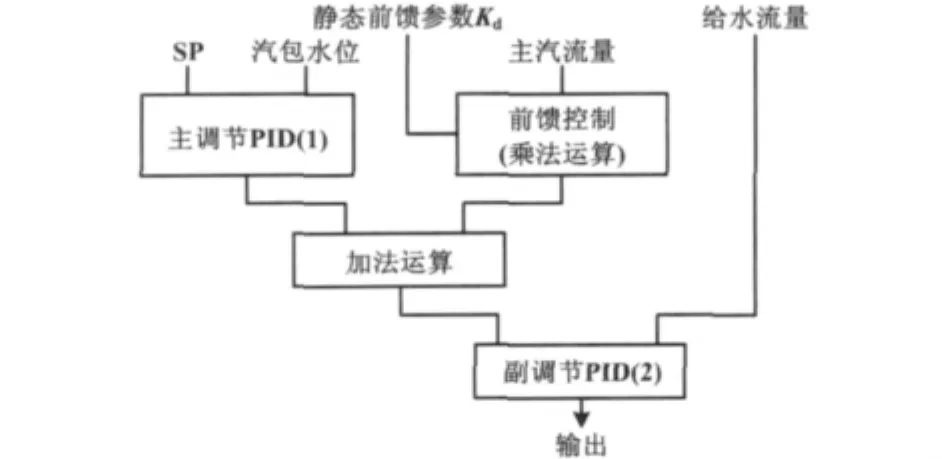
图3 汽包水位三冲量控制策略示意图Fig.3 Schematic of the three elements control strategy for drum water level
图3中,主调节控制汽包水位,把汽包水位的输出值与主汽流量的前馈控制值进行加法运算,所得的值作为副调节的给定值;副调节控制给水流量。
理论上,只要副调节与前馈控制设置合理,就有可能消除所有的干扰,那么汽包水位本身的变化就可以依靠主调节进行缓慢调节。
1.2.4 参数的整定
自动控制效果的好坏还取决于参数整定的合理性。由于理论计算的整定参数法计算繁琐,工作量大,可靠性不高,加上工业过程特性的复杂性,因此,在实际的工业应用中,往往利用工程经验凑试法来整定PID的参数。
工程经验凑试法是根据经验值,先将控制器参数放在一个数值上,在闭合的控制系统中,直接通过改变给定值施加干扰,观察过渡过程曲线;然后运用P、I和D对过渡过程的影响为指导,按照规定顺序,逐个整定比例系数、积分时间和微分时间,直到观察曲线达到满意为止[7]。
使用串级控制的调试顺序是先整定主调节器,再整定副调节器。
为了达到更好的调节效果,可修正前馈控制系数,使系数从小到大进行整定,直至自动控制效果达到满意为止。
1.3 控制参数的处理
在汽包水位的自动控制中,控制系统的参与量会受到诸多因素的干扰,对其进行合理的处理也是不可缺少的环节。
首先需要处理汽包水位,该参数的反应速度快。受到干扰时,汽包水位参数反映到坐标图上是一个个脉冲波形,影响了给水自动控制的效果。如果干扰稍重,就有可能使电动给水调节阀频繁动作。
为消除给水调节阀不必要的动作,可以通过两种方法解决:一是在进入PID调节器之前加一个软滤波器设置,通过设置合理的时间常数,对汽包水位进行滤波处理;二是改变变送器的阻尼时间常数,使输出的电流信号波形平滑。对于主汽流量和给水流量,如果曲线比较平滑,则可加或不加。如果由于控制或其他原因引起脉冲波形,一般采用第一种方法,因为它们涉及流量的累积计算。
除了上述对参与量作响应调整外,还需要对给水调节阀的电动执行机构灵敏度进行调整,即所谓的电动执行机构死区调整。过高的灵敏度会导致调节阀频繁动作,影响电动执行机构机械部分以及调节阀的使用寿命;反之过低的灵敏度,又会影响汽包水位控制的稳定性。因此,合理设置电动执行机构的灵敏度,才能达到满意的控制效果。
根据经验,一般把电动执行机构的灵敏度设置在2%左右,但最终还是需要根据设备的实际调试结果而定。这样既不会对汽包水位控制构成影响,又能减少电动调节阀动作的次数,从而达到满意的自动控制效果。
1.4 设备的合理选型
如果没有合理的设备选型,实际控制的效果也不会满意。这是因为软件设施与硬件设施不匹配,导致输入信号与输出信号不能按照要求执行,影响了自动控制的效果。
在汽包水位的自动控制中,涉及的设备有提供PID控制的设备、测量仪表、电动执行机构和调节阀(或用替代电动调节阀控制汽包水位的变频器)。这些设备均须进行合理的选型。
2 优化处理后的效果
综合上述分析,优化处理后的效果如下。
①克服了汽包水位的“虚假水位”现象,消除了给水压力等因素的干扰。
②在给水流量、主汽流量和燃烧工况等发生变化的情况下,较好地完成了汽包水位控制任务,使汽包水位控制在设定值的±15 mm范围之内。
③当主汽流量发生变化时,给水流量与主汽流量朝着同一方向变化,避免了由于“虚假水位”的影响造成锅炉给水调节阀的反向控制。
④给水侧压力变化或多炉运行造成给水流量变化时,不用等到汽包水位发生变化,给水调节阀就自动控制,调节满足正常需要的给水流量。这明显减小了由于主汽流量、给水流量等因素的扰动导致汽包水位的明显波动,且缩短了调节时间,使系统快速进入稳态,提高了汽包水位的控制效果。
⑤另外,把分析研究得到的结果应用于生产实践,在无特殊情况下,给水阀自动调节平均周期约为30 s,延长了给水调节阀的调节时间,减少了给水调节阀的调节次数。
3 结束语
通过以上分析研究和实践表明,要进行汽包水位自动调节的优化控制,就不能忽视参与控制的各个环节。优化锅炉给水自动调节的效果,就能提高锅炉的蒸汽品质,保证锅炉安全运行,延长设备使用寿命,降低企业的生产成本。
[1]辽宁省电力工业局.锅炉运行[M].北京:中国电力出版社,2006.
[2]能源部基本建设司.电力建设施工及验收技术规范(热工仪表及控制装置篇)[S].北京:水利电力出版社,1990.
[3]俞利锋.压力补偿在汽包水位中的精确应用[J].自动化与仪器仪表,2007(4):50.
[4]梁福波.流量测量与选型[J].自动化与仪器仪表,2007(4):54.
[5]胡寿松.自动控制原理[M].北京:科学出版社,2001.
[6]王伟.工业锅炉汽包水位自动控制系统设计[J].自动化与仪器仪表,1999(5):14-17.
[7]戴雅馨.浅析PID参数整定法[J].纯碱工业,2009(6):15-17.
Optimization of the Automatic Control Effect of Feedwater Regulating Valve
In order to optimize the automatic control effect of the boiler feedwater regulating valve,some factors affecting the control effect of feedwater regulating valve are analyzed and researched,such as the accuracy of parameters measurement,dynamic characteristic of drum water level,basic control principle,and the rationality of parameters processing and equipment selection.The factors affecting the automatic control are optimized,such as parameters compensation and correction,control strategy optimization,parameters reasonable filtering and equipment rational selection.Practice shows that automatic control effect is improved and equipment life is extended by conducting a series of optimization processes.
Feedwater regulating valve Automatic control Parameters measurement Controllability Optimization
TP273+.1
A
修改稿收到日期:2011-12-06。
作者俞利锋(1976-),男,2006年毕业于重庆大学计算机科学与技术专业,工程师;主要从事生产管理与自动化技术研究。
猜你喜欢
应用能源技术(2022年8期)2022-09-20
江苏广播电视报·新教育(2022年1期)2022-05-15
机械管理开发(2022年1期)2022-03-24
青海电力(2022年1期)2022-03-18
科学与财富(2021年13期)2021-07-04
发电设备(2020年5期)2020-10-09
山东电力技术(2020年8期)2020-09-02
航空发动机(2020年1期)2020-06-13
商品与质量(2018年42期)2018-04-22
山东工业技术(2016年15期)2016-12-01