基于激光透射法测量平板玻璃的厚度
2012-02-01 03:34张景超李贺光肖长江王晓磊
物理实验 2012年5期
闫 玺,张景超,李贺光,肖长江,丁 瑞,王晓磊
(燕山大学a.理学院;b.里仁学院,河北秦皇岛066004)
1 引 言
玻璃厚度是评定玻璃生产质量的重要参量,传统的玻璃厚度检测方法主要是利用螺旋千分尺或者具有相同精度的测量仪器,对待测玻璃进行人工接触式测量.传统方法测量的速度较慢,效率低下,而且在一些工业生产中特定的生产环境(如高温、辐射以及有害气体等)下,无法进行有效的接触测量.近些年来,随着光电检测技术的迅速发展,电荷耦合器件CCD(charge couple device)图像传感器已在图像传感和信号处理、产品外部尺寸检测、分类、表面质量评估、智能化测控及机器视觉中的精确定位等诸多领域中被广泛地应用[1-2],已成为非接触检测的主要工具,目前针对平板玻璃厚度的非接触式测量技术,已有不少人做了大量的工作和研究[3-9],主要测量方法有激光多普勒技术[10-11]、透射法[6,12]、激光三角法[13-14]等.本测量主要采用双路透射法,测量原理简单,采用USB图像采集卡实时提取图像,以自适应阈值法定位边界,灰度重心法提取中心像素,对不同的样品进行实验测量分析,力求准确、简单、快速地操作.
2 光学主要测量原理
光束以一定方向斜射入待测平板玻璃时,根据光的折射定律,光线传播方向将发生偏移,光束中透射出玻璃的光与无待测玻璃时的光线方向平行,只是位置平移了一段距离.
如图1所示,设光束以θ为入射角,玻璃的折射率为n,空气折射率可近似为1,待测平板玻璃厚度为d,光束平移量为Δs.

图1 折射原理图
依据图1中的几何关系可以得到:

根据光的折射定律
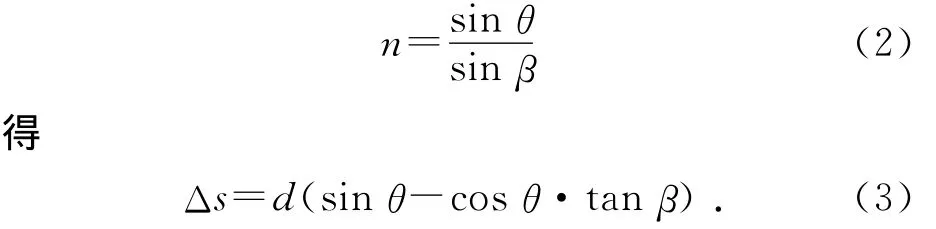
以上各式中θ和n为已知量,可以令H=sinθcosθ·tanβ,式(3)即可写为Δs=dH,从而玻璃的厚度
如果更准确地计算光束平移量,可通过线阵CCD图像传感器接收检测信号,采用对称的双光束,如图2所示,实线部分为光束通过玻璃的实际光路,虚线为没有加载待测玻璃时的光路,经过对称的平面镜反射过来的2束光线,根据前后2次光束位置的变化来求得光束偏移量,同样在对称的反射镜面光束也发生同样的平移.在图2中,每个反射平面镜上,属于入射光线的实线与虚线部分的间距与属于反射光束的实线与虚线的间距相等.从而式(3)变为

玻璃的厚度表达式变为

根据镜头成像倍率公式

由式(4)~(6)可得厚度公式为

式中:M为镜头放大倍率,N为像素数.
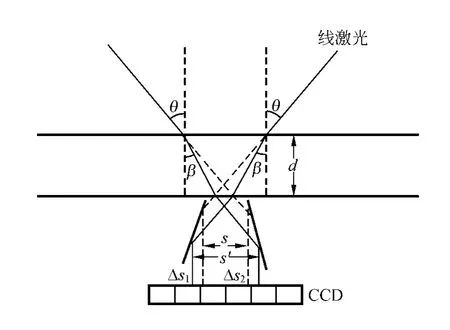
图2 对称双光路图
3 测量系统设计及实验装置
测量系统主要有光学设计部分和图像采集部分,结构装置如图3所示.
光学系统部分由对称安装的激光器、反射镜组和虑光片以及成像镜头组成.光源根据CCD的光谱特性曲线(参照CCD产品简介及说明书),采用半导体激光器,功率为3mW,波长为532nm,光束形状为一字线型,光束出口线宽L≤0.5mm.反射镜组的功能主要是将对称双路激光转变为两平行光束.采用滤波片是因为激光可能输出能量过大,避免CCD输出饱和.镜头采用ZENITAR-F2/50mm型号标准镜头,焦距50mm,光学成像放大率为M=1∶5,最大光圈可达f/2.

图3 系统实验装置示意图
光学图像采集部分主要由线阵CCD传感接收器、传感器驱动电源、图像采集卡、计算机处理系统和显示器组成.CCD传感器采用日本TOSHIBA-TCD1501D型号,该型号器件是一款具有高灵敏度、低噪声、低暗电流等特性线阵电荷耦合器件,有效光敏像元数目为5 000像素,单位像元间距p=7μm.
图像采集卡采用KXUSB-SDK系列,采用USB总线数据接口,接口芯片与主机USB接口相连,图像以黑白图像GRAY8数字图像格式显示.系统通过CCD将光信号转换为电信号,电信号经过传输后,通过A/D转换获得数字信号,图像数据被采集卡读取后,进入计算机保存和显示,以数字图像类型BMP,JPEG及TIFF等格式文件保存.采集到线激光条纹以灰度图像显示,如图4所示;图像的数据以矩阵的形式存储,如图5所示.

图4 线激光灰度图像

图5 数字图像数据格式
4 图像中心像素提取算法
提取条纹图像中心像素是实验测量的关键,由于实验装置中采用的是线激光光源,激光产生的条纹是一字线型(如图4所示),在线激光光束截面上,对应光强能量一般呈现的是强度对称的高斯分布,图像灰度由条纹中心向两侧递减,直到与背景灰度值融合,如图6所示,左边白色部分为目标线光带图像,右边黑色为背景部分,中间为边界过渡区域.理论上灰度中心两边邻域像素对称分布,由于系统采集过程中产生各种随机噪声,对图像采集或多或少带来不稳定的影响.往往会造成图像灰度可能分布部分不对称或者条纹中心偏移等.

图6 光带边界邻域灰度图
在数字图像理论中,根据图像灰度特征的分割理论对图像边界处理有多种方法[15],由于实验采集的线激光灰度图像结构分布简单,主要由背景与2束平行的目标光条纹构成,为了提高灰度中心的准确度,采用自适应边界阈值定位[16],通过灰度重心法[17],提取目标像素中心.
首先根据图像灰度曲线可以快速粗略地找到灰度图像数据某一行i光强中心的粗略位置Ci,如图7所示,然后在Ci左右各n个像素之间范围,要求该范围宽度大于光线带宽.该范围内的灰度平均值为f(i)M,计算在Ci-n至Ci+n之间灰度小于f(i)M的灰度平均值f(i)th,

式中n′为灰度值f(i,j)小于f(i)M的像素数,以此f(i)M为边界阈值,l和r为对应边界位置,灰度重心法求得光带中心位置为
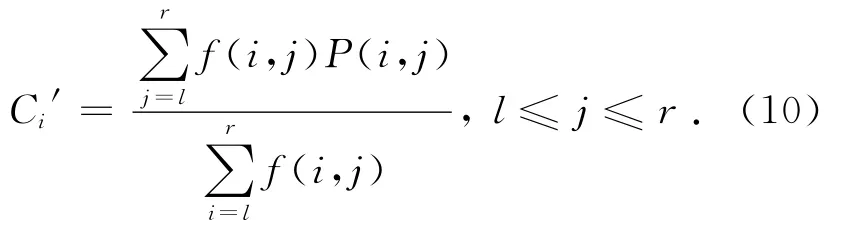
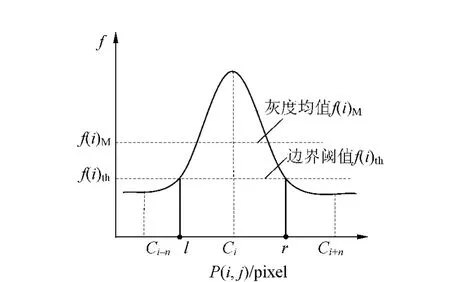
图7 中心像素提取示意图
5 实验及分析
固定好各实验装置,双路激光入射角为45°,调整好对称的两反射镜角度,系统参考标定时采集到的条纹灰度图像如8所示,图像尺寸为5 000像素×1 024像素,沿某一行的扫描对应光强分布图即灰度曲线如图9所示,对采集的图像进行Matlab处理,图10为图像灰度统计直方图,其中左右区域分别为背景与目标像素统计,中间为边界过渡区.通过图9和10可以粗略找到条纹中心与边界区域,图11为幂次变换后图像灰度曲线,参考图11分析,依据式(8)~(10)对图像数据统计计算得各条纹中心位置,最后完成参考标定,可得未加载玻璃情况下条纹宽度.
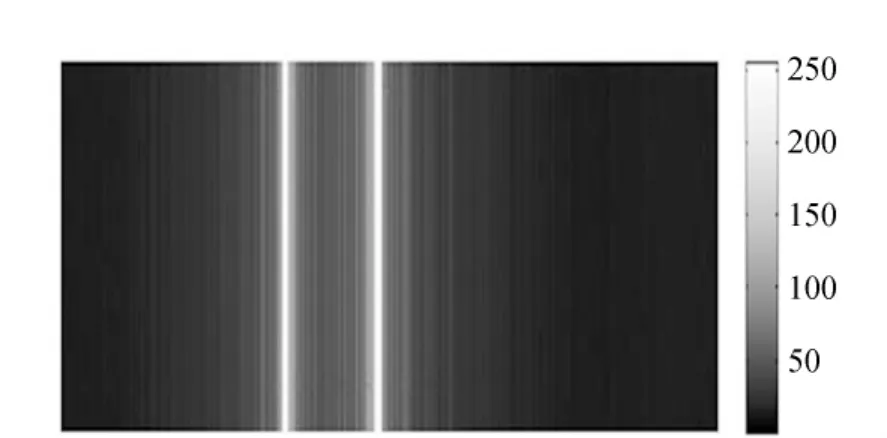
图8 条纹灰度图像

图9 灰度曲线图

图10 灰度统计直方图

图11 幂次变换后灰度曲线
完成系统参考标定后,实验采用样品玻璃折射率为1.512,分别对厚度不同的样品进行实验,实验数据如表1和表2所示.其中,ΔN为光束与标称比较变化的像素数,d为玻璃厚度,Δd为误差量.以样品厚度为5.336mm(千分尺测定)为例,由表1中的数据可以求得厚度测试的平均值为5.340 7mm,与标准值比较测量中最大偏差为0.029mm.表2为不同厚度样本比较,从表中可以看出随着厚度的增加,测量的示值偏差逐渐减小.结果表明测量平均值在玻璃厚度标准允许的误差范围内,能够满足测量要求.

表1 测量数据

表2 不同厚度的测量数据
6 结束语
采用激光透射法,以对称双路激光透射测量方式,利用机器视觉技术,实现了玻璃厚度的非接触测量.本实验装置主要是针对玻璃生产在线方式为构造基础,可在玻璃退火处设计检测.生产中玻璃退火温度较高,热气流上升,而CCD置于下方可以避免退火时上升热流对传感器的干扰,采用双路对称光路可以减少单束激光透射造成的平移误差.使用该方法检测玻璃厚度,测量装置简单,操作方便,能够满足国家规定的厚度检测标准(GB11614-1999)的要求,厚度测量范围可以在2~20mm内.本课题将进一步研究和改进,可应用于图像的亚像素提取、图像滤波去噪处理及高温环境下检测的可靠性能检测研究.
[1] 陈东雷,王清元,张天顺.CCD传感器及其应用研究[J].传感器世界,2007(7):22-26.
[2] 杨冰,丁蔻,李丽华,等.塞曼效应数据分析与处理方法改进[J].物理实验,2010,30(5):36-38.
[3] Liu Chien-hang,Li Zong-han.Application of the thickness measurement of glass substrites[J].Applied Optics,2008(21):3968-3970.
[4] Novikov M A,Tertyshnik A D,Ivanov V V.Optical interference system for controlling float-glass ribbon thickness at hot Stages of production[J].Glass and Ceramics,2004,61(2):37-41.
[5] Mamedov F I,Dadashov M G,Gabibov S S.Device for continuous glass thickness determination[J].Glass and Ceramics,1990,47(5):184-186.
[6] 赵育良,王伟.基于CCD的航空相机平板玻璃厚度的测量系统[J].传感器技术,2003,22(1):58-60.
[7] 刘瑾,杨海马,张菁.基于CCD在线厚度测量方法研究[J].仪器仪表学报,2006,27(6):1217-1218.
[8] 杜晓强,王伟,王召巴.玻璃厚度在线检测系统的研究[J].红外,2008,29(12):36-39.
[9] 张铫,王宝亚,梁洪峰,等.一种新型光学测量系统那在高温环境中的应用研究[J].传感器与系统,2008,27(5):73-75.
[10] 宋晨,吕岑,郭琪,等.一种激光多普勒玻璃厚度的测量方法[J].光子学报,2008,37(8):1635-1638.
[11] 李彦超,章亮,杨彦玲,等.多光束激光外差高精度测量玻璃厚度方法[J].物理学报,2009,58(8):5475-5477.
[12] 胡玉禧,张红强,周绍祥.一直测量折射率的新方法[J].光电工程,1997,24(4):26-29.
[13] 王晓嘉,高隽,王磊.激光三角法综述[J].仪器仪表学报,2004,25(4):601-604.
[14] 黄战华,蔡怀宇,李贺桥,等.三角法激光测量系统的误差分析及消除方法[J].光电工程,2002,29(3):58-59.
[15] 刘文耀.数字图像采集与处理[M].北京:电子工业出版社,2007:272-280.
[16] 吴家勇,王平江,陈吉红,等.基于梯度重心法的线结构光中心亚像素提取算法[J].中国图象图形学报,2009,14(7):1354-1360.
[17] 吴庆阳,苏显渝,李景镇,等.一种新的线结构光光带中心提取算法[J].四川大学学报,2007,39(4):151-155.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
阅读(科学探秘)(2022年5期)2022-06-07
奥秘(2021年3期)2021-04-12
天津医科大学学报(2021年1期)2021-01-26
小福尔摩斯(2019年2期)2019-09-10
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07