同步电机位置及速度的无传感器检测
2012-01-25 07:43王磊邓先明王瑞鲜黄坤
电机与控制学报 2012年5期
王磊,邓先明,王瑞鲜,黄坤
(中国矿业大学 信息与电气工程学院,江苏 徐州221008)
0 引言
在高性能的同步电机矢量控制系统中,需要准确地知道转子的速度和位置信息,通常需要采用光电码盘、旋转变压器等机械传感器进行速度和位置的检测[1-3]。然而,这一类机械传感器的使用给同步电机调速控制系统带来了不少缺陷:1)高精确度的机械传感器价格昂贵,系统的成本大大增加;2)机械传感器需要安装在电机的轴上,同心度会影响安装的问题,安装不当将影响测速精确度;3)传感器的安装使电机轴向上的体积增大,同时结构上的改变也带来了维护的困难,同时破坏了电机结构简单坚固的特点,降低了控制系统的机械鲁棒性;4)机械传感器在高温、高湿的恶劣环境下无法工作,而且工作精确度也受到环境条件的影响[4]。
为了弥补机械传感器的缺陷,国内外学者在20世纪70年代就开始研究无需位置传感器和速度传感器的辨识方法[5-6]。目前绝大部分无速度传感器研究都是针对永磁同步电机或者是感应电机,电励磁同步电机的无传感器控制却很少提及[7-9]。
本文针对电励磁同步电机提出了一种新颖的无机械速度传感器的同步电动机转子位置与速度检测方法,即定子侧注入高频信号的位置和速度检测方法。该方法一方面简化同步电动机速度闭环控制系统的硬件结构,另一方面提高控制系统可靠性和准确性。
1 基于定子高频信号注入的同步电机转子位置检测原理
无传感器的测控思想是利用同步电机自身结构构成传感器,根据基本的电压和电流信息,结合电机的电磁关系来计算电机位置和速度,达到取消外加的机械传感器的目的[10]。
在电励磁同步电机中,转子上有一个转子绕组,定子上有3个对称分布的定子绕组(如图1所示),将电励磁同步电机本身的结构作为一个旋转变压器,定子A相绕组作为旋转变压器的输入绕组,转子直流绕组作为旋转变压器的输出绕组,从定子A相绕组输入高频信号,通过检测转子绕组中的高频输出信号就可以计算出转子的位置和速度。该方法具体的工作原理分析如下。

图1 基于定子高频信号的同步电机位置及速度检测电路图Fig.1 Rotor position and speed detection circuit diagram of synchronous motor based on high frequency signal injection into the stator
当定子A相绕组中叠加角频率为ωH有效值为UAH的高频励磁信号时,它会在定子A相绕组相轴(即A轴)方向产生高频脉振磁场 φAH=φmsinωHt,该高频磁场幅值位置在A轴上,幅值会随时间变化,当转子位置在空间移动时,穿过转子绕组的高频磁通量会变化。设转子N极轴线(即d轴)与定子A相绕组相轴(即+A轴)的空间夹角的电角度为θ,则该高频脉振磁场穿过定子绕组和转子绕组的磁通为
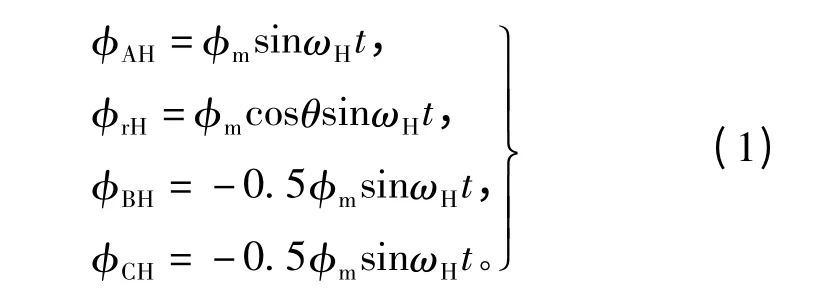
根据变压器原理可知,该高频脉振磁场分别在转子绕组和定子三相绕组感应的电势为
式中:Nr是转子绕组的等效匝数;Ns是定子相绕组等效匝数。则定子与转子的匝比k=Ns/Nr。
利用变压器的分析方法,可以得出高频信号对应的A相和转子侧等效电路为图2所示,由于高频电抗远大于绕组电阻,因此图2将绕组电阻忽略。其中转子侧的物理量利用电机学中的绕组折算方法可以折算到定子侧,xsH是定子绕组漏电抗,xrH是转子绕组漏电抗折算值。

图2 注入高频信号的等效电路Fig.2 Equivalent circuit based on high frequency signal injection
根据图2,可以写出高频电势对应的关系为

式中:kx是定子绕组的分压系数。
如果忽略转子绕组漏抗时,由式(2)、式(3)可得出转子和定子绕组的高频电压有效值大小为

可见,定子三相高频电压的频率和相位与转子高频电压相同,但是有效值按照式(4)变化。利用式(4)可以计算出转子位置角度,这里称为隐极公式。
将计算出的转子位置角度θ,进行对时间t的导数计算,就可以计算出转子的机械速度nr为

式中p是电机的极对数。因为上述求得的转子位置角度θ是电角度,然而电角度是机械角度的p倍,因此求机械速度时,需要对电角度除以p再求导数。
在凸极电机中,由于气隙不均匀,相对于定子A相绕组对应的励磁回路而言,当转子变化时,其中的漏磁通和主磁通对应的磁路磁导是变化的,它们对应的电抗会变化。当 θ=00时,主磁通对应的磁路磁导是最大的,励磁电抗xmH等于最大值;漏磁通对应的磁路磁导是最小的,漏抗xsH等于最小值,因为定子高频漏磁通路径主要是空气。当θ=90°时,主磁通对应的磁路磁导是最小的,励磁电抗xmH为最小值;漏磁通对应的磁路磁导是最大的,漏抗xsH达到最大值,因为定子高频漏磁可以经过转子凸极极尖铁心构成磁回路,磁阻变小。在一对磁极下,由于存在两个凸极,因此,定子高频励磁电抗xmH和漏电抗xsH会变化两个周期,其变化规律为

式中:xm0是励磁电抗平均值;xmm是励磁电抗周期分量幅值;xs0是定子漏电抗平均值;xsm是定子漏电抗周期分量幅值。
将式(6)代入式(3)、式(4)可以得到凸极同步电机转子高频信号与转角的更精确关系为

将式(7)称为凸极公式。
另外,当电机旋转时,高频磁场也会在转子绕组中产生速度电势,速度电势的存在会产生转子位置和速度的检测误差。因此,为了减少速度电势的影响,注入高频信号的频率要高些。
2 高频信号注入同步电机的有限元分析
利用Ansoft工具对一台20极的凸极同步电机样机进行了有限元分析和计算。
2.1 转子高频感应电势大小与转角关系分析
定子仅A相加高频信号,转子静止,转子绕组轴线与定子A相轴线对齐时为0°,改变转子位置,转子位置从0°变化至90°电角度分别进行有限元分析,得到转子不同位置时转子高频感应电势erH波形如图3。由图可知,转子感应电势的有效值与转角呈余弦分布。

图3 转子不同位置时的转子感应电势波形图Fig.3 Waveform of induction voltage on rotor’s different positions
2.2 转子速度与转子高频电势包络线频率关系分析
转子加额定直流励磁,定子加三相对称交流电压,同时定子 A相加高频信号,UH=300 V,fH=1 000 Hz,转子以不同转速旋转:24 r/min、36 r/min、48 r/min、60 r/min,进行有限元分析,仿真曲线如图4。由转子高频感应电势输出波形图可知,高频输出信号的幅值随转子电角度按照余弦规律变化,即高频信号的包络线是余弦变化。利用包络线的频率就可以计算出电机的转速。

图4 注入高频信号时的转子感应电势Fig.4 Induced voltage of rotor based on high-frequency signal injection
表1是利用图4中的转子感应电势的频率估算得到的转速估计值和电机运行的实际值。可见用该方法检测的电机速度准确,误差较小。

表1 转子转速估计值与实际值Table 1 Rotor speed of the calculated values and the actual values
3 样机实验分析
为了验证本文提出的基于定子高频信号的同步电机转子位置及速度检测方法的正确性和测量效果,对一台功率为1 kW,极数为4极的凸极电励磁同步电机进行了实验。
在同步电机的定子侧注入高频信号,检测转子绕组的高频输出电压,以此来分析同步电机转子的位置和速度。测试中,用直流电机拖动同步电机旋转,在同步电机的定转子A相绕组注入的交流量为400 Hz的中频电源,利用高精确度的光电码盘来直接检测转子位置角度,利用数字示波器监测高频电压。图5和图6分别为同步电机在转速为100 r/min和1 000 r/min时用示波器观测到的高频输出波形。

图5 同步电机转子高频电压和定子U相高频电流波形(100 r/min)Fig.5 Rotor high-frequency voltage and U phase current wave of synchronous motor(100 r/min)

图6 同步电机转子高频电压和定子U相高频电流波形(1 000 r/min)Fig.6 Rotor high-frequency voltage and U phase current wave of synchronous motor(1 000 r/min)
由高频输出波形图可知,高频输出信号的幅值随转子电角度按照式(7)的规律变化。只要提取了图中高频信号的包络线,利用凸极式(7)就可以辨识出电机的转子位置。图7是转子位置角的实际值、及根据隐极式(4)所得出的转子位置角度。图8为转子位置角的实际值和由凸极式(7)所得出的的计算值。从图7中可以看出,利用隐极式(4)得到转子位置角的近似计算值与实际值存在较大的误差,而从图8中可以看出,利用凸极式(7)得到转子位置角的精确计算值与实际值基本一致。可见式(4)适合隐极电机的转子位置估计,不适合凸极电机的位置估计。

图7 基于隐极公式的转子位置角度Fig.7 Rotor position based on non-salient pole

图8 基于凸极公式的转子位置角度Fig.8 Rotor position based on salient pole
根据转子高频信号包络线的频率就可以计算出电机的转速。图9是转子速度的实际值与估算值,可见用该方法检测的电机速度准确,误差较小。

图9 转子速度的实际值与估算值Fig.9 Rotor speed of the actual value and the calculated values
4 结语
同步电机矢量控制系统中的机械传感器存在安装困难、维护不方便和容易损坏等问题,无传感器控制技术是解决问题的重要途径。本文针对电励磁同步电机的特殊结构和电磁特点,提出基于定子侧高频信号注入的转子位置及速度的无传感器检测。该方法利用电励磁同步电机的自身结构来检测转子位置信号,并通过自身绕组输出该信号,即在定子绕组中加高频励磁,转子绕组中感应与转子角度相关的高频信号,通过该高频信号就可以计算出转子位置角度和速度。
本文根据隐极和凸极电机的不同结构,分别推导出了相应的转子位置计算公私。通过仿真和样机试验验证了本文提出的无机械传感器检测方法的正确性和准确性。
[1]IDKHAJINE Lahoucine1,MONMASSON Eric1,NAOUAR,Mohamed,etal.Fully integrated FPGA-based controller for synchronous motor drive[J].IEEE Transactions on Industrial Electronics,2009,56(10):4006-4017.
[2]SARMA S,AGRAWAL V K,UDUPA S,et al.Instantaneous angular position and speed measurement using a dsp based resolver-todigital converter[J].Measurement,2008,41(7):788 - 796.
[3]SARMA S,AGRAWAL V K,UDUPA S,et al.Software-based resolver-to-digital conversion using a dsp[J].IEEE Transactions on Industrial Electronics,2008,55(1):371 -379.
[4]李绍文,吴双.一种新的基于旋转变压器的测速方法[J].电气传动,2011,41(8):61-64.LI Shaowen,WU Shuang.New speed determination method based on resolver[J].Electric Drive,2011,41(8):61 - 64.
[5]MATTHEW J C,ROBERT D L.Rotor position and velocity estimation for a salient-pole permanent magnet synchronous machine at standstill and high speeds[J].IEEE Transactions on Industry Applications,1998,34(4):784 -789.
[6]万山明,吴芳,黄声华.基于高频电压信号注入的永磁同步电机转子初始位置估计[J].中国电机工程学报.2008,33(28):82-86.WAN Shanming,WU Fang,HUANG Shenghua.Initial rotor position estimation of permanent magner synchronous motor based on high frequency voltage signal injection method[J].Proceedings of the CSEE,2008,28(33):82 -86.
[7]BRIZ Fernando,DEGNER Michael W.Rotor position estimation:a review of high-frequency methods[J].IEEE Industrial Electronics Magazine,2011,5(2):24-36.
[8]SAYEEF Saad,FOO Gilbert,RAHMAN M F.Rotor position and speed estimation of a variable structure direct-torque-controlled ipm synchronous motor drive at very low speeds including standstill[J].IEEE Transactions on Industrial Electronics,2010,57(11):3715-3723.
[9]WROBEL Rafal,BUDDEN Alan S,SALT Dan,et al.Rotor design for sensorless position estimation in permanent-magnet machines[J].IEEE Transactions on Industrial Electronics,2011,58(9):3815-3824.
[10]邓先明,马志勋,李新宇,等.转子注入高频的同步电机无传感器控制[J].电机与控制学报,2010,14(10):61 -67.DENG Xianming,MA Zhixun,LI Xinyu,et al.Sensorless control of synchronous motor based on high-frequency signal injection into the rotor[J].Electric Machines and Control,2010,14(10):61-67.
猜你喜欢
大电机技术(2022年3期)2022-08-06
河北电力技术(2021年2期)2021-07-29
防爆电机(2020年6期)2020-12-14
防爆电机(2020年4期)2020-12-14
河北理科教学研究(2020年1期)2020-07-24
电子制作(2018年1期)2018-04-04
光学精密工程(2016年3期)2016-11-07
电测与仪表(2016年23期)2016-04-12
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01