
基于神经网络的围网渔船横摇运动研究
2012-01-22 10:29,
船海工程 2012年5期
,
(武汉理工大学 交通学院,武汉 430063)
1 规则波中的横摇神经网络模型
1.1 训练样本的准备
在人工神经网络的实际应用中,大多数的神经网络模型是采用BP算法和它的变化形式建立的。由于多层前馈型神经网络的训练多使用误差反向传播算法,因此将这种网络直接称为BP神经网络(Back-Propagation Network)[1],其优点在于它具有很强的非线性映射能力。图1所示为只有一个隐层的神经网络的基本模型,这样的网络结构能实现以任意精度对任意函数的逼近。可见神经网络是由输入层、隐层和输出层组成的,各层有数目不等的神经元,联系各层的是传递函数和训练函数。训练网络和结构设计的前提条件做好训练样本集的准备工作。

图1 神经网络的基本模型
本文选取一艘垂线间长为65.0 m的围网渔船,7种载况的耐波性计算参数见表1。使用挪威船级社(DNV)开发的基于三维时域Rankine源方法的Wasim软件[2],得到在规则波中的横摇频率响应曲线,见图2。航速为0、5、13、16 kn;浪向为0、45、90、135、180(°)。
1.2 神经网络的预估模型的建立
训练样本准备好后,通过对神经网络结构各组成部分的试验来确定最佳神经网络的各要素。

表1 各载况下的对应参数
1.2.1 各层神经元节点数的确定
一般的研究中,输入参数选择那些对输出影响大的变量,此外还要求个输入变量之间的独立性强,便于后续的分析工作。由于研究的是同一艘拖网渔船不同载况的运动情况,所以选择神经网络的输入参数为:吃水、重心高度、航速、浪向,以及波浪频率,即输入层节点数确定为5个。输出变量则要选择系统要实现的功能目标,因此选取横摇运动的无因次的频率响应值为输出数据。输出层节点确定为1个。
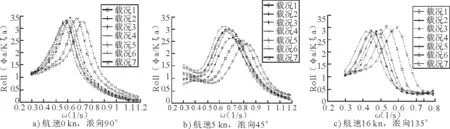
图2 横摇频率响应曲线
隐层神经元节点的功能就是提取并储存输入输出的数据中的内在规律,因此隐层节点数直接决定了网络的拟合能力。最佳节点数的确定一般采用试凑法。首先用较少的隐层神经元数来训练网络,观察误差和网络性能的优劣;然后依次增加神经元节点数,用相同的数据和网络要素来建立网络观察误差的变化;直到寻找到最好效果的网络为止。试验结果发现随着隐层节点数的增加,相关系数越来越大,这也验证了隐节点的作用,是可以提高神经网络的性能的。但是神经元数目达到10个以后,指标变化很慢,而且随着神经元的增多,训练每一步的时间明显增大,因此认为节点数在10~20的范围内最佳。
1.2.2 训练函数和性能函数的确定
确定该神经网络的训练函数,首先建立一个单隐层BP网络,经初步试验,决定采用15个神经元的隐层,隐层传递函数采用双曲正切S型传递函数(tansig),输出层传递函数采用线性传递函数(purelin),最大训练次数取为3 000,误差函数精度控制为0.001,然后分别应用梯度下降法(traingd)、带动量的梯度下降法(traingdm)、自适应的梯度下降法(traingda)、带动量和自适应梯度下降法(traingdx)、共轭梯度法(trainscg)、L-M算法(trainlm)和贝叶斯正则化算法(trainbr)来训练基本网络,用网络输出数据与目标的训练相关系数、代表性能的函数均方差函数mse及误差向量的2范数norm来衡量训练结果[3]。
(1)
(2)
式中:N——训练样本数;
Tk,Yk——实际值和预测值。
从训练结果看, traingdm、traingda、traingdx作为改进的BP网络算法,性能指标和拟合效果要优于标准BP算法traingd,但对比后3种优化算法trainscg、 trainlm、trainbr,网络质量和预测效果还是有所差距的,而优化算法的各性能函数值是比较理想的,在所选所有训练算法中,贝叶斯正则化算法的训练相关系数、均方差mse、误差向量2范数均为最好,因此网络训练函数选定为trainbr。
1.2.3 传递函数的确定
为确定该神经网络隐层和输出层的传递函数,仍采用15个神经元的隐层,最大训练次数采用3 000,采用trainbr为训练函数,用网络输出数据与目标的训练相关系数及误差向量的2范数来衡量训练结果。对BP网络应使用可微的函数作传递函数,分别对常用的对数S型传递函数tansig、双曲正切S型传递函数logsig、线性传递函数purelin进行组合,共9组试验。从结果分析得出,隐层的传递函数采用purelin是最不合适的;当隐层采用tansig或logsig,输出层时采用logsig时,效果也不佳;除此之外的另4种组合,训练质量都比较理想,与目标数据的吻合程度也很好。通过多次试验并综合考虑后,决定采用tansig,purelin分别作为隐层和输出层的传递函数。
1.3 神经网络模型的确定
按上述的训练和设计方法,最终确定最佳的围网渔船横摇频率响应函数的神经网络预测模型,预测结果见图3、4。
图3、4预测的是16 kn航速下,船舶在第7种载况下横浪中的横摇运动频率响应函数曲线。
绝大多数的预测样本的相对误差都在10%以内,而网络输出数据与目标的训练相关系数为0.993 17,代表性能的函数均方差函数mse为0.011 5,误差向量的2范数norm为0.535 4。可见,BP网络效果达到预想的要求,网络的精度已经基本胜任横摇运动近似计算的应用需要。在验证该神经网络的可靠性的基础上,给出横摇无因次的频率响应值与吃水d、重心高度Zg、航速V、浪向β及波浪频率ω的数学关系表达式,见式(3),其中,xi(i=1~5)分别表示以上5个参数。网络模型各层的权值和阈值见表2。

图3 BP网络模型预测横摇频率响应曲线

图4 横摇频率响应曲线的误差曲线
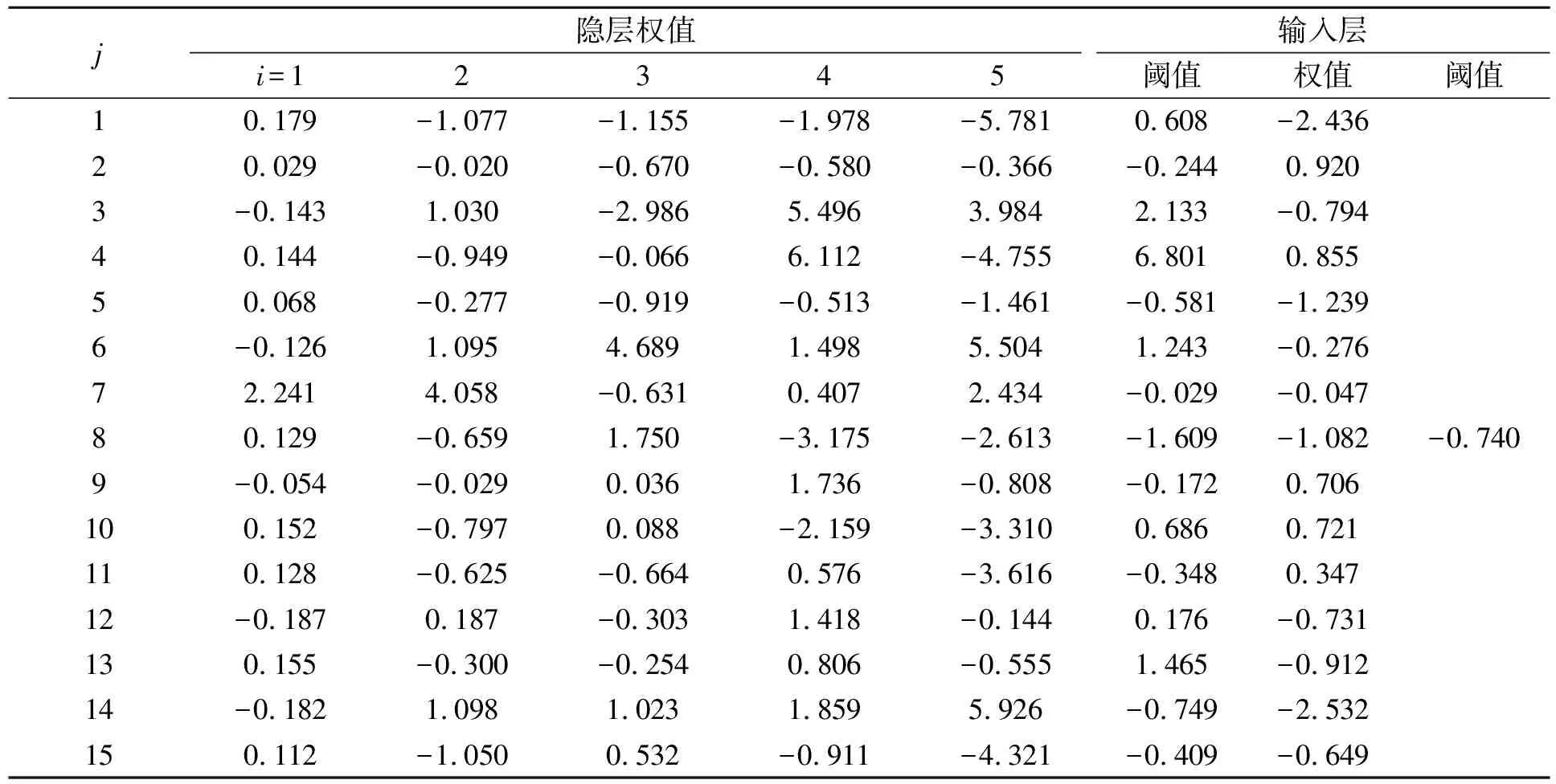
表2 横摇频响网络模型各层的权值和阈值
(3)
2 不规则波中横摇神经网络的应用
预报围网渔船在不规则波中的横摇运动响应采用谱分析法。横摇的频率响应函数是船舶运动的固有特性,运用上文中的神经网络模型进行预测。根据金枪鱼的主要产地的海况以及金枪鱼的工作环境,取定4、5、6级海况,并选用第十二届ITTC会议推荐的双参数谱作为海浪谱,结合频响和海浪谱得到波浪中的船体响应的谱密度,即运动谱,而不规则海浪下的横摇运动响应有义值,由运动响应谱密度曲线下的面积计算得到[4]。
不规则波中的运动响应另一种方法,使用7种实际航运载况的不规则海况下的计算数据为训练样本,同样建立一个不规则波中的神经网络预测横摇角有义值的模型,其值与吃水d、重心高度Zg、航速V、浪向β及波浪频率ω的关系表达式为
φa=f(d,Zg,V,β,ω)=
(4)
预测结果见图5、6,分别表示4、5、6级海况下的横摇运动有义值随各参数的变化情况。

图5 横摇有义值随吃水和重心高度的变化

图6 横摇有义值随速度和浪向的变化
1)图5表现的是载况(吃水和重心高度)对横摇运动的影响,可见在零速横浪时,随着吃水的增加,横摇有义值略有增大,吃水(排水量)对横摇影响不大,同时说明吃水的增大使横摇阻尼有一定的减小,才导致横摇角的增大。
2)重心高度增大时,横摇有义值明显减小,主要原因是横摇周期随重心的变大而减小。其它航行状态时,重心高度也有同样的影响,这个结论可应用于实际航运,可由重心高度的不断变化来监测横摇角的改变,以调整载况。
3)图6反映的是在某一载况下,航速和浪向对横摇运动的影响,可见在低速(10 kn以内)时,横摇峰值点出现在随浪45°~90°的区域内;而航速再增大时,横浪中的横摇角有义值是较大的,所以航行和作业时应尽量避免这样的航速和浪向的组合。
3 结论
1)以一艘围网渔船的多种载况的耐波性计算为数据库,训练出具有良好的准确性与适用性的船舶横摇运动的神经网络模型,可用于其在任意载况规则波中横摇运动频率响应函数及不规则波中各海况下的横摇角有义值的预报。
2)利用建立好的神经网络模型,针对这一艘围网渔船,分析其载况、航行状态变化时,对横摇运动的影响规律,对实船风浪中围网渔船的航行有一定的实践意义。
[1] 张 舒.船舶阻力BP神经网络预估模块及主尺度选优模块研究[D].武汉:华中科技大学,2008.
[2] 项久洋.船型要素对三体船耐波性和波浪载荷影响的数值计算[D].武汉:武汉理工大学,2008.
[3] 陈爱国,叶家玮.基于神经网络的船舶阻力计算数值实验研究[J].中国造船,2010,51(2): 21-27.
[4] 毛筱菲,郁俭华.排水型高速船的耐波性试验与理论研究[J].武汉理工大学学报,2005,29(4):591-594.
猜你喜欢
农业工程学报(2022年13期)2022-10-09
浙江大学学报(理学版)(2022年4期)2022-07-25
灌溉排水学报(2022年6期)2022-07-13
复旦学报(自然科学版)(2022年1期)2022-06-16
水泥工程(2020年4期)2020-12-18
计算机应用与软件(2020年9期)2020-09-09
人民珠江(2019年4期)2019-04-20
消费导刊(2018年8期)2018-05-25
演艺科技(2017年3期)2017-05-03
科技视界(2015年25期)2015-09-01
