
基于变增益滑模控制器的PMSM矢量控制系统
2012-01-16 03:39:42王一超
上海电机学院学报 2012年2期
刘 军, 王一超
(上海电机学院 电气学院,上海 200240)
基于变增益滑模控制器的PMSM矢量控制系统
刘 军, 王一超
(上海电机学院 电气学院,上海 200240)
滑模控制(SMC)存在的抖振对系统的性能具有较大影响。在滑模控制器永磁同步电动机(PMSM)矢量控制系统基础上,引入变增益控制,提出一种变增益滑模控制器控制方法,较好地改善了系统的动态性能。仿真试验结果表明,该方法有效地抑制了抖振,具有更好的抗负载扰动能力,提高了系统快速性。
永磁同步电动机;滑模控制;变增益;负载扰动
永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)具有结构简单、质量轻、体积小、损耗小、效率高等优点,在国防、工农业生产和日常生活等方面获得了越来越广泛的应用[1-2]。相对于传统常规控制,滑模控制(Sliding Mode Control,SMC)具有对系统数学模型的精确性要求不高,对系统不确定参数、变化参数及外界环境扰动等具有较好的自适应性等优点,在PMSM控制系统中的应用也日益广泛[3]。
SMC算法简单、容易实现,当扰动出现时,系统能快速响应,瞬态性能较好。SMC克服了系统时变、非线性、强耦合等因素的不良影响,提高了系统的控制性能,为电动机控制提供了一种良好途径。但在实际应用中,SMC理想的开关特性是不可能存在的。由于存在惯性、空间滞后及时间延迟等现象,实际应用的SMC通常是在滑模线两侧来回穿越,做高频来回运动,这就意味着SMC存在抖振现象。因此,抖振问题也就成了SMC中最重要的问题[4-6]。
本文在介绍一种积分型滑模控制器的同时,分析了抖振的原因,提出一种变增益SMC方法,并利用Matlab/Simulink对两种控制方法进行仿真。经过对比后发现,变增益SMC方法能有效地减小抖振,具有更好的抗负载扰动能力,并且提高了系统快速性。
1 PMSM的数学模型
PMSM的定子和普通电励磁三相同步电动机的定子相似。在建模及分析过程中通常假设如下[7-9]:转子永磁磁场在气隙空间分布为正弦波,定子电枢绕组中的感应电动势也为正弦波;忽略定子铁芯饱和,磁路为线性,电感参数不变;不计铁心涡流与磁滞损耗。
基于上述假设,可得到在d-q坐标下PMSM的数学模型。
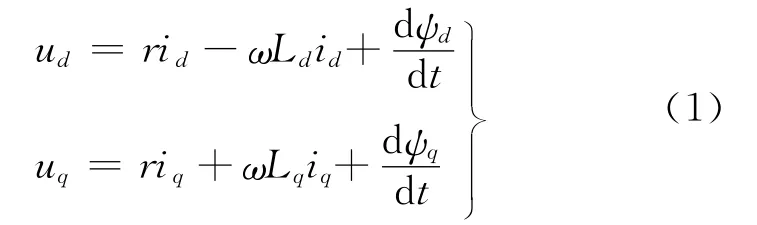
电压方程为
磁链方程为

对于贴面式的PMSM有Ld=Lq=L,其中L为电感,故有转矩方程

机械运动方程为

式中,ud,uq,id,iq,Ld,Lq,ψd,ψq分别为d,q 轴的电压、电流、电感及磁链;r为定子电阻;ψf为永磁体与定子交链的磁链;Te为电磁转矩;np为电动机的极对数;TL为负载转矩;J为转动惯量;B为阻尼系数;ω为转子电角速度。
2 转速滑模控制器设计
由式(3)和式(4)可得到:

将式(5)化为

式中,i*q为转速滑模控制器的输出。
令扰动

则式(6)为

定义速度误差为

式中,ω*为给定的参考速度值,一般为常数。这样,对式(8)两边求导,并将式(7)代入,可得:

根据上述分析,本文设计了滑模控制器。
(1)确定切换函数
以误差e为输入,u为控制量,选取一种积分型滑模面为

(2)求解积分型滑模控制器
SMC的设计目标就是要求系统状态,即误差在有限时间内到达并保持在滑模面上。为实现这一目标,本文选择函数切换控制的变结构控制方案,设

式中,ueq为等效部分的滑模控制,即系统在s·=0和a(t)=0时,所需要的控制量。不难推导出等效控制

usw为切换部分的滑模控制,通过高频切换控制使系统误差趋向滑模线,并保证状态即误差沿着滑模线滑向稳定点,实现对不确定性和外加干扰的鲁棒控制。取

式中,f为正实数;sign()为符号函数。
由此,可得控制器为

显然,上述设计符合滑模运动的存在性、可达性及稳定性,本文不予证明。
根据式(14),在Matlab中建立了积分滑模控制器的模型,如图1所示。
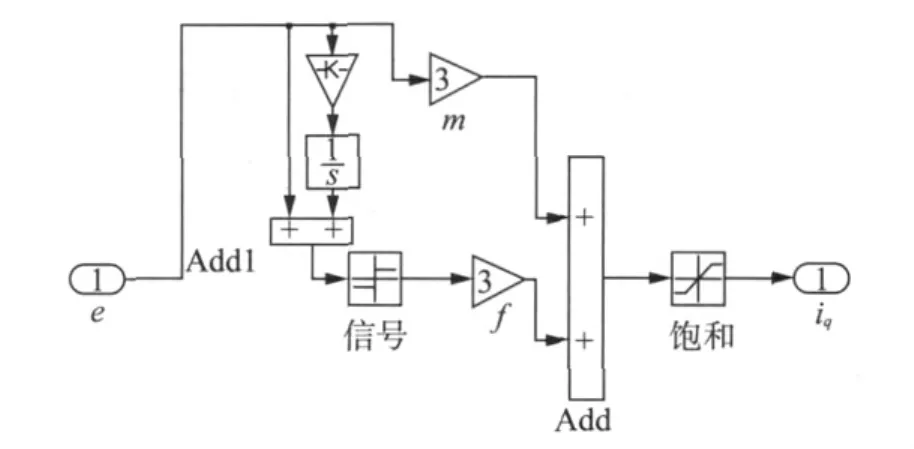
图1 积分滑模控制器模型Fig.1 Simulation model of integral SMC
于是,可得到Matlab环境下整个PMSM矢量控制系统的模型,如图2所示。

图2 基于滑模控制器PMSM矢量控制系统模型Fig.2 Simulation model of a vector control system of PMSM based on SMC
3 变增益滑模控制器设计
抖振是运动点在滑模面附近来回震荡造成的。运动点在经过滑模面的速度越大,抖振就越大,即SMC的切换增益越大。由于惯性作用,很容易造成运动点多次穿越滑模面,从而加剧抖振[10-12]。因此,考虑以下的控制方法:当运动点离滑模面较远时,切换增益会增大,这样就会产生很大的控制力,使响应速度加快,缩短系统响应时间;而当运动点趋近滑模面时,切换增益会较小,使运动点经过滑模面时的速度减小,惯性就变小,从而抖振就会变小。
研究发现,当系统运动点远离滑模面时,s逐渐变大;而当系统点趋近滑模面时,s逐渐变小[13-15]。若设计切换增益的变化规律与s的变化方向一致,则可以设计出改进的积分型滑模控制器。

式中,k1,k2为正常数。当|s|变化时,f1会随之变化。故可得到新的滑模控制器为

根据式(16),在Matlab中建立积分滑模控制器的模型,如图3所示。
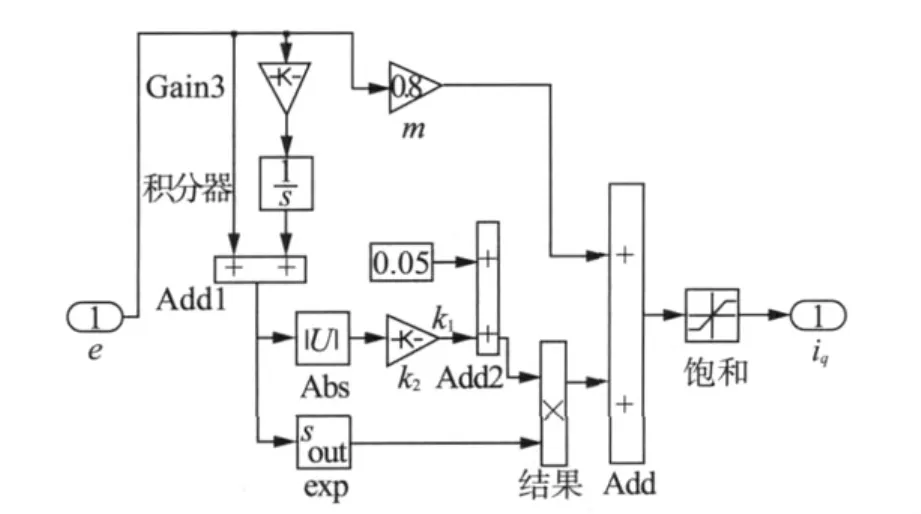
图3 变增益积分滑模型控制器模型Fig.3 Simulation model of integral SMC based on variable gain
4 仿真结果分析
本文实验所用电动机参数如下:P=2kW,定子绕组电阻R=2.875Ω,d和q相绕组自感为8.5mH,转子磁场磁通ψf=0.175Wb,转动惯量J=0.8g·m2,极对数p=2,直流电压Udc=300V。设定仿真时总的仿真时间为0.2s,给定转速为600r/min。
系统仿真时,取k1=0.05,k2=0.5,电动机空载时启动。在t=0.1s时,给定负载T=4N·m。图4为积分型滑模控制器和变增益积分型滑模控制器启动转速曲线。由图可见,在变增益滑模控制下,系统快速性得到了明显提高。图5为当t=0.1s,给定负载T=4N·m,截取0.1s时两种滑模控制器的转速曲线。由图可见,在变增益控制下,系统抖振变小,抗负载干扰性增强。
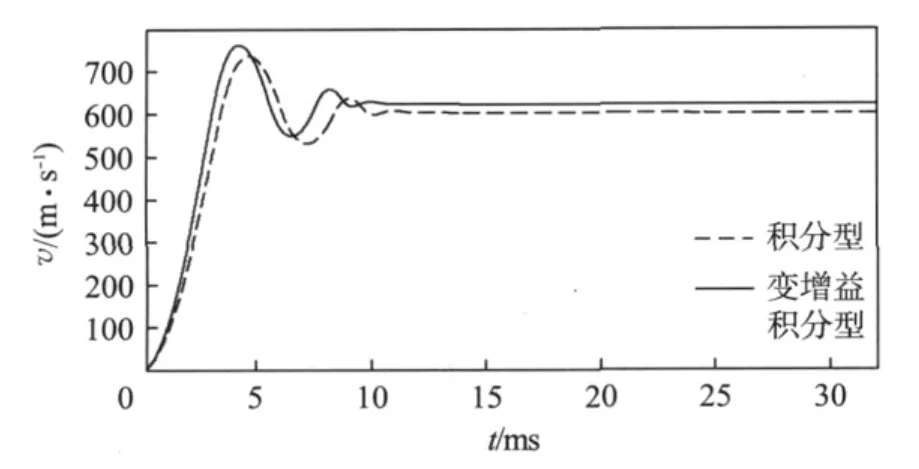
图4 两种滑模控制器启动转速曲线Fig.4 Speed waveform of two SMCs
5 结 语

图5 当t=0.1s时,两种滑模控制器时转速曲线Fig.5 Speed waveform of two SMCs at t=0.1s
本文给出了一种积分型滑模控制器,针对抖振问题,提出了一种变增益滑模控制方法。利用Matlab/Simulink对两种控制方法进行仿真后发现,变增益滑模控制方法有效地减小了抖振,具有更好的抗负载扰动能力,系统快速性得到提高。
[1]暨绵浩.永磁同步电动机及其调速系统综述和展望[J].微特电机,2007(3):49-52.
[2]刘 军,俞金寿.永磁同步电机控制策略[J].上海电机学院学报,2007,10(3):180-185.
[3]Liu Jun,Wu ChunHua,Yu Jinshou.Research on the starting method of sensorless PMSM based on electrical steady-state model[C]//IEEE International Symposium on Industrial Electronics.Seoul,Korea:IEEE,2009:519-522.
[4]吴茂刚.矢量控制永磁同步电动机交流伺服系统的研究[D].杭州:浙江大学,2006.
[5]陈 荣.永磁同步电机伺服系统研究[D].南京:南京航空航天大学,2004.
[6]Utkin V I.Variable structure systems with sliding modes[J].IEEE Transaction on Automatic Control,1977,22(2):212-222.
[7]李 鹏,马建军,李文强,等.一类不确定非线性系统的改进积分型滑模控制[J].控制与决策,2009,24(10):1463-1466,1472.
[8]李永坚,许志伟,彭 晓.SRM积分滑模变结构与神经网络补偿控制[J].电机与控制学报,2011,15(1):33-37,43.
[9]Wu S T,Shao Y J.Adaptive vibration control using a virtual-vibration-absorber controller[J].Journal of Sound and Vibration,2007,305(4-5):891-903.
[10]汪海波,周 波,方斯琛.永磁同步电机调速系统的滑模控制[J].电工技术学报,2009,24(9):71-76.
[11]Chung S C Y,Lin C L.A transformed Lure problem for sliding mode control and chattering reduction[J].IEEE Transactions on Automatic Control,1999,44(3):563-568.
[12]Dodds S J.Sliding mode vector control of PMSM drives with minimum energy position following[C]//13th Power Electronics and Motion Control Conference.Poznan:IEEE,2008:2559-2566.
[13]Wang Zhengguang,Jin Jianxun,Guo Youguang,et al.Modeling and simulation of PMSM control sys-tem based on SVPWM[C]//27th Chinese Control Conference.Kunming,China: [s.n.],2008:724-728.
[14]李文林.多输入离散不确定时滞系统变结构控制设计[J].系统工程与电子技术,2007,29(10):1714-1718.
[15]Lin F J,Chou W D.An induction motor servo drive using sliding-mode controller with genetic algorithm[J].Electric Power Systems Research,2003,64(2):93-108.
PMSM Vector Control Based on Variable Gain Sliding Mode Controller
LIU Jun, WANG Yichao
(School of Electric,Shanghai Dianji University,Shanghai 200240,China)
The existence of chattering in sliding mode control(SMC)has great impact to the permanent magnet synchronous motors(PMSM)control system performance.In this paper,an improved scheme of integral SMC is proposed based on a variable gain,which can improve the dynamic performance of PMSM control systems.Simulation results show that the scheme can reduce chattering and has better ability of anti-interference.It can also improve the response speed of the system.
permanent magnet synchronous motor(PMSM);sliding mode control(SMC);variable gain;load disturbance
TM 351
A
2095-0020(2012)02-0076-05
2012-03-17
上海市教育委员会科研创新项目资助(11cxy64);上海市教育委员会重点学科资助(J51901)
刘 军(1965-),男,教授,博士,专业方向为电机控制,E-mail:liujun@sdju.edu.cn
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
科学技术创新(2020年3期)2020-03-24 10:30:58
中国惯性技术学报(2019年6期)2019-03-04 09:50:06
测控技术(2018年4期)2018-11-25 09:47:26
测控技术(2018年3期)2018-11-25 09:45:40
韶关学院学报(2018年6期)2018-07-21 02:20:22
北京航空航天大学学报(2016年7期)2016-11-16 01:50:55
锻造与冲压(2016年22期)2016-06-21 15:06:35
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54

- 上海电机学院学报的其它文章
- 双氧水浓度对硅纳米线生长的影响
- 大型锥形筒体的锻造