驾驶员辅助系统报警性能测试台架的研究
2012-01-15 06:02:40王睿达孟建军
电子设计工程 2012年14期
王睿达,孟建军
(兰州交通大学 机电工程学院,甘肃 兰州 730070)
我国车辆保有量持续增长,各种汽车安全技术大量应用,例如 ABRS(安全气囊),C-NCAP(中国新车评价规程)中的碰撞性能测试等技术措施能够减轻发生碰撞事故产生的危害,降低事故引发伤亡的概率。但是,被动降低碰撞危害程度的方式,还不足以使汽车完全避免事故,因此,能够帮助驾驶员感知行车环境、车辆状态信息,预估交通危险的,提出警告辅助驾驶员正确判断和正确决策,或主动干预车辆操控的驾驶员辅助系统应运而生,车道偏离报警系统(LDW)和前撞报警(FCW)是驾驶员辅助系统中重要的组成部分。由于报警的性能会影响驾驶员对当前行驶状况的判断,因此针对报警是否可靠的测试显得非常重要。
中国专利201010261862.1提出了一种针对LDW的测试装置[1],使用图像检测设备计算道路车道线和自车车轮之间的相对距离,以及自车相对于车道线的离线速度,将检测而得的数据与待测系统识别车道线的结果进行对比得到待测系统的识别精度,但是测试设备的精度是否高于待测系统却不能保证。NHTSA评价FCW的性能使用道路测试方法,实时记录行车环境影像资料和时间同步的FCW报警数据,通过测试人员比对自由驾驶过程中待测系统报警时刻所对应的车前、车后、车侧和驾驶室影像,得到每一次报警性质[2],从而得到报警准确率等参数表征系统总体性能的可靠性,尽管其真实地反映了FCW报警的性能,但是自由驾驶中的道路状况的随机性,导致了一旦更换不同待测系统就需要再次进行大量道路试验,工作量极其庞大,而且我国的交通环境复杂,仅各种公路建设中存在的车道线样式就有10种[3],道路试验更是短时间难以完成。并且,上述两种装置和方法都很难设计某种特定的工况,做到有针对性地测试报警系统在各种易误报、易漏报的工况下的报警性能。提升报警系统的性能,降低误报率和漏报率是重要手段[4-5]。因此,集成有统一的人工比对方法,样本具有通用性和可重复性,针对降低误警率和虚警率,能够针对驾驶员辅助系统报警功能的性能进行硬件在环仿真测试的台架显示出其重要价值。
1 系统总体设计
首先,测试样本采集和管理,样本可重复使用,;其次,实现测试样本对于待测系统的数据回放;再次测试台架I/O接口通用,工作参数可调,方便用于接入不同报警系统,评价不同系统应对同一工况能力的差别;最后,设计能够在样本回放的离线分析阶段,对报警信号的性质进行人工判定的结果进行记录,能够在判定完毕后出具分析报告。
测试系统软件开发环境是LabVIEW,更注重测试人员所使用的前面板开发,使测试过程更加直观[6],硬件则为NI公司的PXI和PCI系列板卡。
在如图1所示为测试系统结构示意图,测试系统控制程序设计3个主要的功能单元:数据采集单元,离线分析单元,分析报告单元。其中,数据采集单元用于采集样本、管理测试工况数据库。离线分析单元用于将测试工况数据库的样本回放给待测系统形成仿真的道路行驶环境和自车状态信息;离线分析集成有判定子模块,用于测试人员综合待测系统在仿真环境下的工作情况判定报警的性质。分析报告单元,用于解析测试样本的特征曲线、待测系统报警的特征曲线以及测试人员对比判定的结果。用户控制模块则用于实现测试人员在虚拟仪器操作界面上进行各种调试。

图1 测试系统结构Fig.1 Test system structure
2 测试系统搭建
图2中所示的数据采集单元工作状态。用户控制程序配置数字化仪PXI-5122端口连接图像传感器视频输出端口;PXI-8513/2局域网络CAN卡连接实验车的车载OBD接口,视频数据和CAN报文数据保存时序同步。在嵌入式控制器PXI-8108集成的硬盘存储单位上建立测试工况数据库,按照采集时刻为文件名标注同一时间采集的视频数据和CAN报文数据成为一个样本。PCI-1409作为视频数据监控的硬件系统,其的视频输入端与PXI-5122板卡的输入端并联。
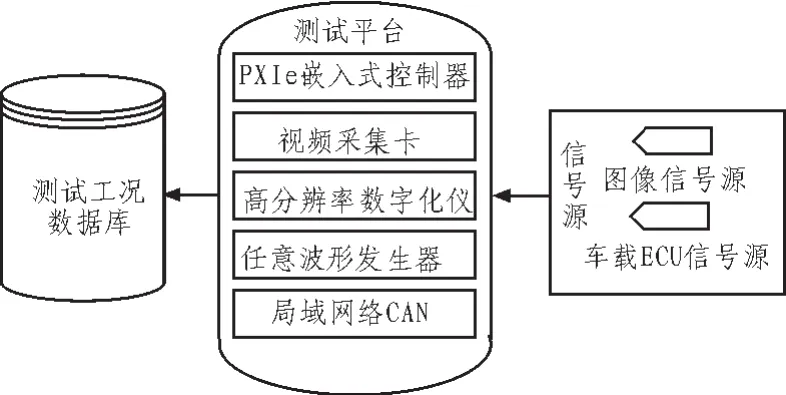
图2 数据采集单元工作状态Fig.2 Operating mode of data acquisition unit
图3 为离线分析待测系统接入时的配置,PXI-5421作为仿真道路环境中取代图像传感器为仿真视频信号源;PXI-8513/2作为仿真自车状态中取代车载ECU为仿真CAN报文数据信号源,CAN/XS0为输出端口。图3中3.1和3.2连线包含两种数据通信通道:1)测试平台的视频数据仿真数据源与待测系统的通信;2)CAN报文数据的仿真数据源与待测系统的通信。3.3连线连接了待测系统报警输出信号与测试平台,由PXI-8513/2的CAN/XS0作为报警数据采集端口。

图3 离线分析单元工作状态Fig.3 Operating mode of offline analysis unit
图4 为测试人员判定操作界面示意图。PCI-1409板卡的CH0连接到待测系统视频处理图像输出端从而能够采集待测系统处理后的行车环境图像,并将处理后的图像置于图4中视频观察区。图4中4.11和4.12为虚拟转向灯,解析自车状态的左、右转向灯信号,4.13为虚拟刹车灯,解析了自车状态的刹车信号;虚拟车速表,解析了样本中自车状态的实时车速;4.21和4.22为虚拟车道偏离报警提示灯,4.23为虚拟前撞报警灯;判定区中包含6个虚拟按键,其中虚拟按键4.31、4.32、4.33表示了车道偏离报警判断的性质,分别为正确、误报、漏报;同样,虚拟按键4.41、4.42、4.43表示了前撞报警判断的性质,分别为正确、误报、漏报;程序设置了暂停和播放两个虚拟按键作为控制样本回放给待测系统的控制方式。测试系统记录测试人员对判定区内6个虚拟按键操作的时刻,在测试工况数据库中根据样本取出的时刻编辑文件名,并以txt文档格式保存。在此操作界面上,测试人员可以根据如下信息进行判定的操作:视频观察区的车辆前方道路影像,虚拟仪表和虚拟指示灯所表达的自车行驶状态和待测系统报警的状态。

图4 判定操作界面示意Fig.4 Schematic plot of determineing operator interfaces
图5 为分析报告生成界面,图5右边数据图线区解析以当前回放样本的时间为基准的自车状态的各种数据的曲线,包括车速-时间曲线、报警时刻-时间曲线、转向灯-时间曲线、刹车信号-时间曲线、待测系统报警-时间曲线;左边判定文档区测试人员对于待测系统对当前回访的样本的测试结果,格式为“****年**月**日**时**分**秒,**报警正确(或误警或虚警)”。
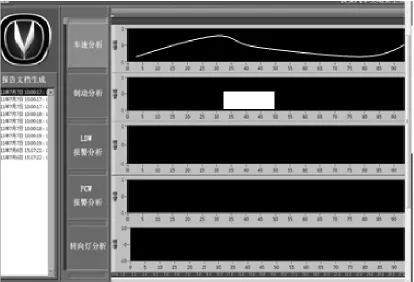
图5 分析报告生成界面Fig.5 Interface of generate analysis report
3 试验验证
为了验证测试系统能否满足研究需要,选择某型基于图像的具有LDW功能和FCW功能的驾驶员辅助系统作为待测系统,测试方案设计如下:
1)验证目的概述
待测系统V和待测系统V+,V系统集成有初期报警算法,V+系统则在V系统初期报警算法的基础上进行了升级和修改。在实车道路试验过程中,由于道路行车的随机性,同一报警场景很难完全一致重复出现,因此仅有实验人员主观感受认为V+系统的性能略好于V系统,在什么工况下性能好也无法确定。因此,针对两种系统进行硬件在环虚拟测试,对比两种系统在同一测试样本下的报警性能。
2)样本准备
选择同一测试工况样本ES1,ES1是包含时序同步的车载CAN信息和车辆前方道路图像的数据组合。测试工况样本特点如表1所示,除去表中的16个描述报警场景,其余时间均为正常安全行驶场景。

表1 ES1样本特点Tab.1 Sample characteristics of ES1
3)验证过程
分别将待测系统V和V+接入测试系统,回放ES1,测试两种系统对于相同的14个场景的报警反应,以及在其余样本时间内的报警反应,如图6为ES1样本的视频截图。

图6 测试工况样本截图Fig.6 Screenshot of testing sample
如表2为2个待测系统针对该测试工况样本中包含的12个正确报警场景的反应,V系统只有在 “突然加速冲向前车”时未报警,由此可见两个系统在应对正确报警场景反应的能力差别不大,V+系统在处理一项易漏报场景的能力较好。计算得到,V系统的报警正确率为91.7%,漏报率为8.3%。
如表3为2个待测系统ES1样本回放中,除去正确报警场景外的其余时间的报警统计,所有的报警出现均为误报,V系统的误报率为29.4%,V+系统则为11.8%,V+系统误报率降低至V系统的三分之一,并且如表3中所示,V+系统基本上消除了LDW的误报,但是对于FCW的误报相对于V系统依然存在。
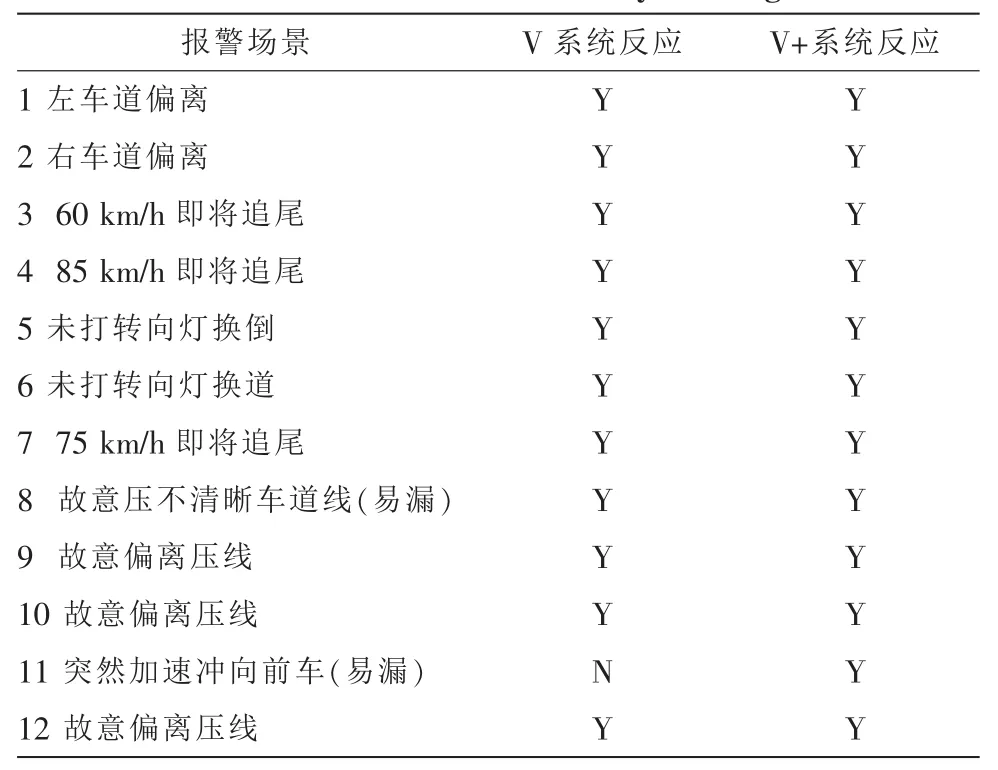
表2 正确报警场景测试结果Tab.2 Test result of accuracy warning
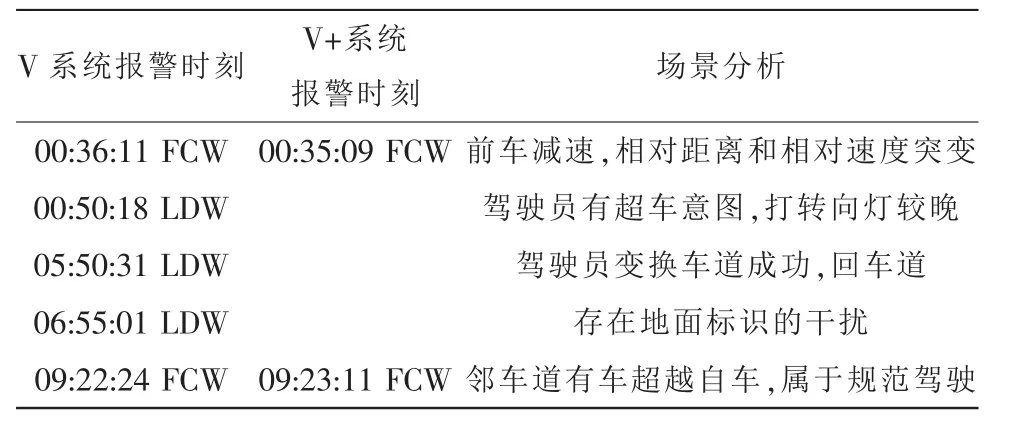
表3 误报警统计表Tab.3 Statistics of error warning
4 结 论
文中提出了一种测试系统的设计和搭建方法,测试对象为具有车道偏离报警系统和前撞报警系统的驾驶员辅助系统,实验验证测试系统可以达到对于报警性能的测试目的。
测试系统的特点是:1)统一测试样本,增加了样本通用性,减少测试工作量;2)在硬件在环虚拟测试过程中,通过待测系统接入测试系统形成模拟的行车环境时,输入不同测试样本或相同测试样本,可方便得知单一待测系统在不同危险场景下报警的可靠性,或者不同待测系统在单一危险场景下报警的性能差别;3)测试系统有较高的通用性,由于采用了PXI系列硬件系统,有多种I/O接口可供选择,待测系统较易接入测试系统进行离线分析;4)测试系统提供给测试人员的测试方法综合考虑了道路状况和自车行驶状态,较为可靠。
[1]李克强,王建强,罗剑,等.车道偏离报警系统的测试装置:中国,201010261862.1[P].2010.
[2]Fitch G M,Rakha H A,Arafeh M,et al.Safety Benefut Evaluation of a Forward Collision Warning System:Final Report[R].US:NHTSA and Center for Truck and Bus Safety Virginia Tech Transportation Institute,2008.
[3]中华人民共和国交通部.JTB01-2003.公路工程技术标准[S].北京:2004.
[4]Wilson B H,Stearns M D,Koopmann J,et al.Evaluation of a Road-Departure CrashWarning System[R].US:U.S Department of Transportation National Highway Traffic Safety Administration,2007.
[5]郭磊,王建强,李克强.存在车辆干扰的车道线识别[J].汽车工程,2007,29(5):372-376.GUO Lei,WANG Jian-qiang,LI Ke-qiang.Lane detection llnder vehicles disturbance [J].Automotive Engineering,2007,29(5):372-376.
[6]徐晓东,郑对元,肖武.LabVIEW 8.5常用功能与编程实例精讲[M].北京:电子工业出版社,2009.
猜你喜欢
软件导刊(2022年9期)2022-09-22 05:59:54
防爆电机(2021年4期)2021-07-28 07:42:46
中国特种设备安全(2021年11期)2021-05-05 06:13:18
铁道通信信号(2020年6期)2020-09-21 09:23:34
中成药(2018年2期)2018-05-09 07:20:09
山东化工(2018年20期)2018-04-02 16:30:53
电脑知识与技术(2017年31期)2017-12-11 13:54:11
水利科技与经济(2016年8期)2016-04-22 03:41:48
设备管理与维修(2016年5期)2016-03-16 02:20:44
电测与仪表(2015年8期)2015-04-09 11:50:12