基于偏执电流的双电机伺服系统消隙
2012-01-15 06:02张永祥
电子设计工程 2012年14期
陈 赟,张永祥
(西北工业大学 电子信息学院,陕西 西安 710129)
一般伺服电机额定转速较高,输出力矩较小,而负载则要求转速较低,驱动力矩较大,因此需要在电机和负载之间加入一个很大的减速器,它一方面放大力矩另一方面降低转速。由于轴承间隙、齿轮的侧向间隙等使减速器出现空间,随着传动链在系统中所处的位置不同,其传动链的间隙对系统的性能的影响也不同。为了减小传动链的间隙,通常可采用机械消隙传动或电消隙传动的方法解决。双电机消隙传动方式[2]的实质是利用伺服控制电路使传动系统在启动和换向的过程中,两套完全一致的减速机构的输出齿轮分别贴紧在主轴大齿轮的相反的合面上,使主轴大齿轮受到偏置力矩[2],不能在齿隙中来回摆动,从而达到消隙。
1 双电机消隙原理
所谓消隙[3],则是在系统启动和换向时,在两个电机之间建立一个偏置电流形成一个偏置力矩来消除齿隙。实现消隙控制,理想的方案是使两个电机分别作为正向驱动和方向驱动的电机,正向电机在反转时候输出一个足以消除传动间隙的正向力矩,反向电机在正转时候输出一个足以消除传动间隙反向力矩,此时两电机的力矩关系如图 1、图 2所示[4-6],图 1是正向消息过程,图 2为反向消隙过程。

图1 正向消隙过程Fig.1 Positive anti-backlash process
2 双电机消隙伺服系统建模
根据电机本身具有的动力学方程和大小齿轮的之间的弹力的动力学方程得到双电机伺服系统的动力学模型[7]如下式:

图2 逆向消隙过程Fig.2 Backward anti-backlash process

其中 Ke1、Ke2,为电机的反电动势常数,θc1、θc2为两个小齿轮的转速;I1、I2是两电机的电枢电流;R1、R2为两电机的电阻;L1、L2为两电机的电枢电感;U1、U2为两电机的端电压;J1、J2为两小齿轮的转动惯量,Jm为大齿轮的转动惯量;b1、b2为两个小齿轮的摩擦,bm为大齿轮处的摩擦;im为大小齿轮间的传动比;Kt1、Kt2为两个小齿轮和大齿轮间的弹性系数比。
把式(1)化为复域模型为:

据上面的复域模型可得到如图3、图4所示的结构图。

图3 双电机复域模型Fig.3 Double-motor complex domain model

图4 双电机消隙仿真模型Fig.4 Double-motor anti-backlash simulation model
3 仿真消隙验证
由以上分析已经知道了双电机的数学模型和结构图,电机的控制是通过三环来实现的,即通过电流环、速度环﹑位置环来实现电机的控制的。电流环和速度环是内环,位置环是外环;当其内部参数变化或受到扰动的时候,电流环和速度环能起到好的抑制作用;位置环主要保证跟踪的精度和性能。那么仿真模型如下[7]:
齿隙为12mil时没有进行消隙的阶跃如图5所示,齿隙为12mil时并对齿隙进行了消隙处理的结果如图6所示。
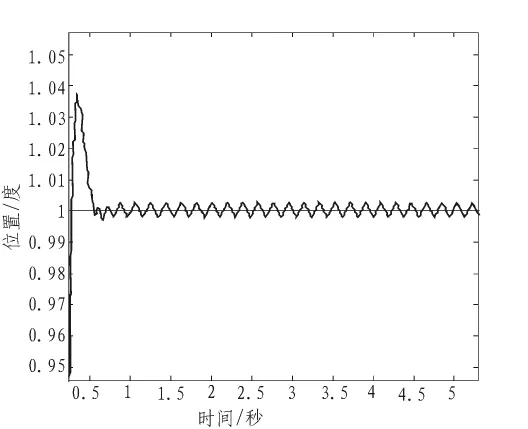
图5 未消隙的调转跟踪图Fig.5 Jerked tracking figure of no anti-backlash
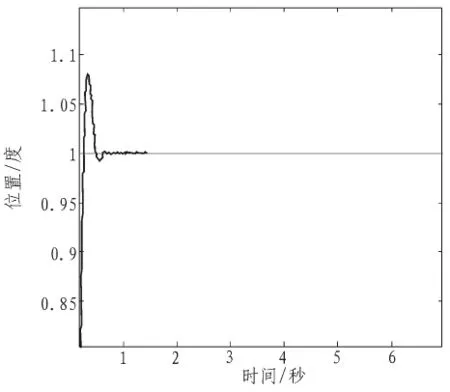
图6 消隙后的调转跟踪图Fig.6 Jerked tracking figure of anti-backlash
齿隙为12mil还未消隙的振幅为0.6正弦效果如图7所示,局部放大后的图像如图8所示。齿隙为12mil振幅为0.6的正弦图如图9所示,局部放大如图10所示。
由以上对系统跟踪阶跃和正弦信号可以看出有齿隙而没进行消隙处理时,系统存在一定的震荡和波动,而在有齿隙同时也进行了消隙处理后系统会慢慢的稳定在一定的稳态误差,不会出现震荡和波动。这也说明了在双电机伺服系统中齿隙的存在会使系统不稳定,使系统产生震荡和波动。同时也说明了文中的消隙原理的可行性。
4 结 论
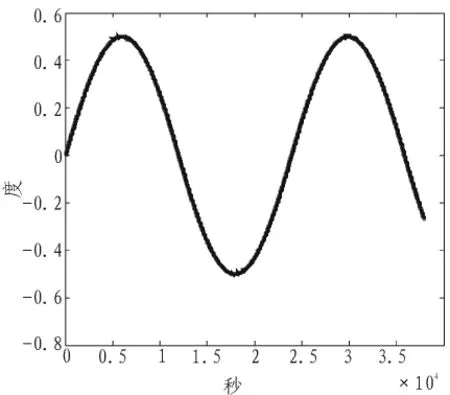
图7 未消隙的正弦跟踪图Fig.7 Sine tracking figure of no anti-backlash

图8 未消隙的正弦跟踪局部放大图Fig.8 Sine tracking local amplification figure of no anti-backlash

图9 消隙后的正弦跟踪图Fig.9 Sine tracking figure of anti-backlash

图10 消息后的正弦跟踪局部放大图Fig.10 Sine tracking local amplification figure of anti-backlash
文中对传动系统中的齿轮间的齿隙进行了研究并推导出了数学的模型,在数学模型的基础上建立了系统的结构图,最后通过仿真实验验证了提出的消隙原理的作用和效果。
[1]左臣伟.高性能多电机同步联动控制系统[D].南京:南京理工大学,2004.
[2]赵海波.双电机同步联动伺服系统的设计与分析 [D].南京:南京理工大学,2006.
[3]李润方,王建军.齿轮系统动力学[M].北京:科学出版社,1995.
[4]周立峰,巢来春.伺服系统基本原理[M].北京:国防工业出版社,1979.
[5]胡佑德,马东升,张莉松.伺服系统原理与设计[M].北京:北京理工大学出版社,1999.
[6]李连升.雷达伺服系统[M].北京:国防工业出版社,1983.
[7]杨文清.双电机消隙伺服系统的研究与应用 [D].西安:西安电子科技大学,2010.
猜你喜欢
技术与市场(2022年7期)2022-07-16
北京航空航天大学学报(2022年6期)2022-07-02
新高考·高三数学(2022年3期)2022-04-28
少儿科学周刊·少年版(2020年9期)2020-03-04
水泥技术(2019年1期)2019-02-26
测控技术(2018年12期)2018-11-25
中学生数理化·高一版(2018年6期)2018-07-09
中学生数理化·高二版(2016年9期)2016-05-14
北京航空航天大学学报(2016年4期)2016-02-27
电测与仪表(2015年16期)2015-04-12