
区间时变时滞线性系统鲁棒稳定性的新判据
2012-01-12 06:42:18张涛王娟孙进生
大连民族大学学报 2012年3期
张涛,王娟,孙进生
(大连民族学院机电信息工程学院,辽宁大连 116605)
区间时变时滞线性系统鲁棒稳定性的新判据
张涛,王娟,孙进生
(大连民族学院机电信息工程学院,辽宁大连 116605)
研究了一类具有区间时变时滞线性不确定系统的鲁棒稳定性问题。通过构造合理的李雅普诺夫函数,并且使用辅助变量以及广义状态法,得出了区间时变时滞系统的时滞相关鲁棒稳定性新判据。同现有方法不同,该方法由于没有对时滞参数导数的限制,可以用于快时变时滞系统。数值算例表明了方法的有效性。
区间时变时滞;鲁棒稳定;辅助变量;广义状态
时滞特性是工业生产过程中十分普遍的现象。由于时滞的存在,严重地影响了控制系统的稳定性以及系统的性能指标。近些年来,对时滞系统的鲁棒稳定问题的研究已经取得了很大的进展。最近,随着遥操作和网络控制系统的快速发展,一类特殊的时滞系统,即区间时变时滞系统引起了学者们的重视,并得到了深入研究[1-3]。现有的大多数的研究成果中都要求时变时滞的导数必须小于1,这在工程实践中并不一定能满足,尤其是在网络控制系统中。本文针对一类具有区间时变时滞线性系统的鲁棒稳定性问题进行研究,基于辅助变量以及广义状态法,利用线性矩阵不等式(LMI)推导该系统时滞依赖的鲁棒稳定的充分条件。在结果中去掉了对时滞参数导数的要求,得到的方法可用于具有快时变时滞系统。
1 问题描述
考虑由以下状态方程描述的具有时变输入时滞的线性不确定系统:

这里x(t)єRn为状态变量,x(t)=φ(t),tє[-τmax,0]为初始值,A0和A1为适当维数的常数矩阵,△A0(t)和△A1(t)为时变不确定矩阵且满足

注1:(3)式中表达的时滞,既可以表示区间时变状态时滞,也可以代表系统建模时时滞参数的不准确性。当δ=τmed时,τ(t)є[0,],= 2τmed,就和传统的时变时滞参数的表达方式一样了。但是本文中对时变时滞参数的导数没有任何要求,而传统的设计方法为了保证LMI中某些对角项为负定,要求时滞参数的导数必须小于1。
下面介绍一下本文用到的引理:
引理1[4](a)对具有适当维数的任意向量x,y及对称正定矩阵X,有

(b)给定适当维数的矩阵Y,D,E,其中Y是对称的,则

对所有的满足FTF≤I的矩阵F成立,当且仅当存在一个常数ε>0,使得

2 主要结果
考虑具有区间时变状态时滞的不确定系统(1),假设τmed,δ是已知正数,且τmed>δ,如果存在适当维数的矩阵P>0,Q>0,R>0,S>0,Nj,Mj(j=1,2,3)和正常数ε,使得下面LMI成立
那么对于任意时滞参数满足式(3)且不确定性矩阵满足(2)的系统是渐近稳定。


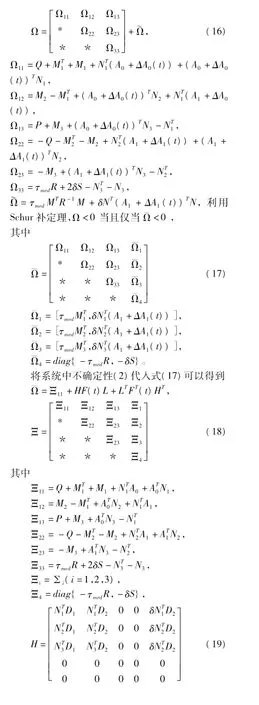
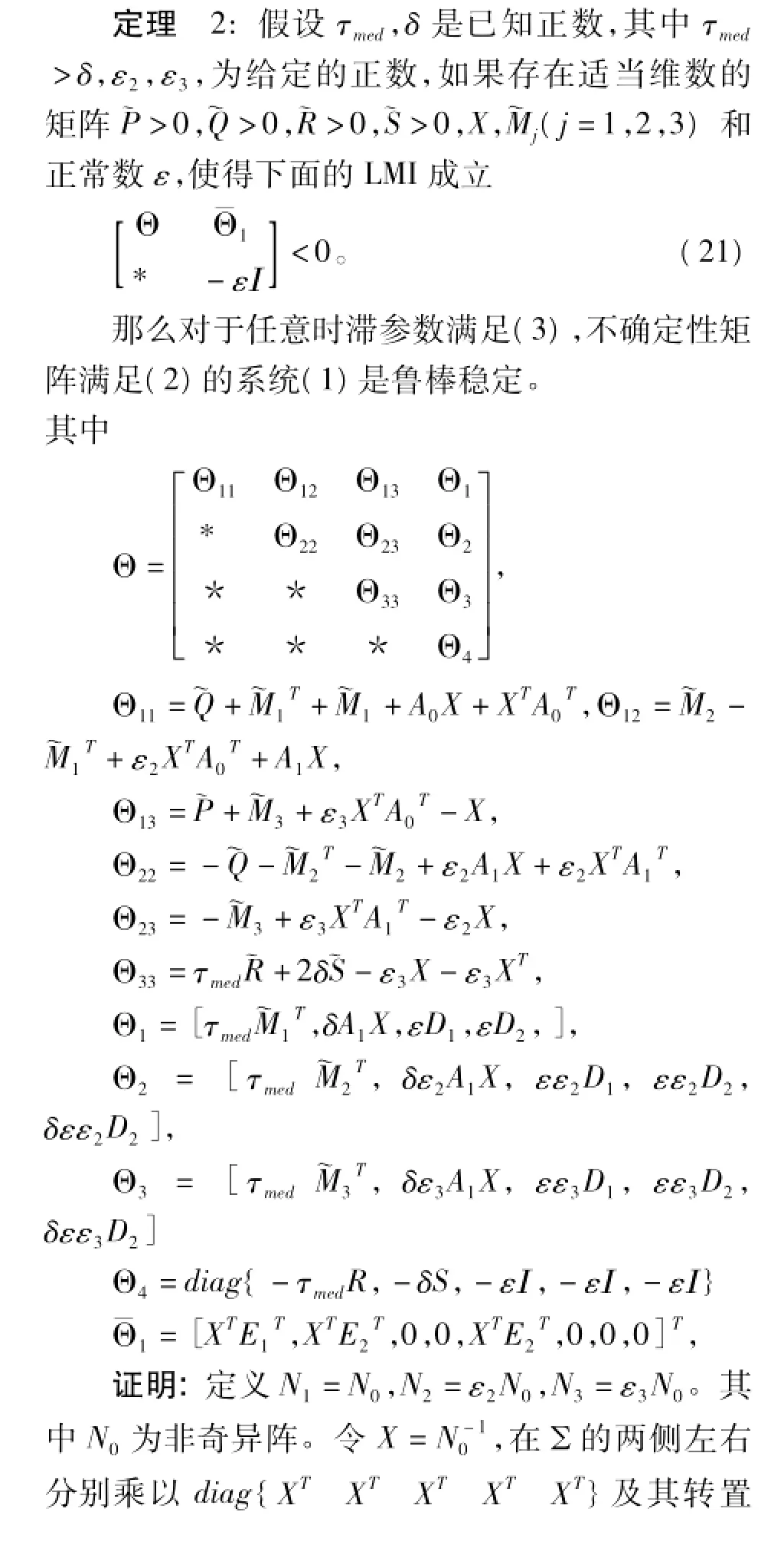
由于定理1中的结果不是一个标准的LMI,不能直接用Matlab中的LMI工具箱求解,所以下面给出可以直接通过LMI工具箱求解的定理。
3 数值算例
4 结语
本文研究了一类具有区间时变时滞线性系统的鲁棒稳定性问题,通过构造Lyapunov泛函,并结合积分不等式技巧,得到了系统鲁棒稳定性新判据。所得结论可利用线性矩阵不等式求解,且仅依赖于时变时滞参数的中值及其变化范围,而与时滞参数的导数无关,可以用于快时变时滞系统。数值算例验证了方法的有效性。
[1]李涛,张合新,孙鹏.含区间时变时滞的线性不确定系统鲁棒稳定性新判据[J].控制与决策,2010,25 (6):953-957.
[2]王新梅,魏武,贺良华,等.一类有界区间时变时滞系统的稳定性分析与研究[J].信息与控制,2009,38(5):526-531.
[3]张忻欣.具有区间时变时滞线性系统新的稳定性准则[J].杭州电子科技大学学报,2010,30(2):69-72.
[4]CAO Y Y,SUN Y X,LAM J.Delay-dependent robust H∞control for uncertain systems with time varying delays[J].IEE Proceedings:Control Theory and Applications,1998,143:338-344.
New Robust Stability Criteria for a Class of Linear Systems with Interval Time-varying Delay Systems
ZHANG Tao,WANG Juan,SUN Jin-sheng
(College of Electromechanical&Information Engineering,Dalian Nationalities University,Dalian Liaoning 116605,China)
The robust stability of a class of linear systems with interval time-varying delay systems is investigated.By constructing an appropriate type of Lyapunov fanction and using the auxiliary variables and generalized states methods,the new delay-dependent robust stability criteria is derived.Unlike existing methodologies,because there are no restrictions on the derivative of the time delay,the proposed method can allow fast time-varying delay.A numerical example shows the effectiveness of the proposed criteria.
interval time-varying delay;robust stability;auxiliary variables;generalized states
TP13
A
1009-315X(2012)03-0221-04
2011-11-08;最后
2011-12-31
辽宁省教育厅资助项目(L2010093);中央高校基本科研业务费专项资金资助项目(DC10040102)。
张涛(1977-),男,山东昌邑人,副教授,博士,主要从事时滞系统、鲁棒控制、模糊控制等研究。
(责任编辑 刘敏)
猜你喜欢
数学物理学报(2020年5期)2020-11-26 06:06:48
自动化学报(2019年6期)2019-07-23 01:18:18
自动化学报(2017年4期)2017-06-15 20:28:54
智富时代(2017年4期)2017-04-27 17:08:47
广东石油化工学院学报(2016年6期)2016-05-17 05:17:43
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:42
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:42
中国铁道科学(2015年4期)2015-06-21 06:46:08
浙江大学学报(工学版)(2015年1期)2015-03-01 01:17:20
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:40
