
基于贝叶斯网络的空中目标意图识别方法*
2012-01-01 05:51:06朱波方立恭张小东
现代防御技术 2012年2期
朱波,方立恭,张小东
(海军大连舰艇学院a.研究生管理大队;b.导弹与舰炮系,辽宁 大连 116018)
0 引言
在现代防空作战中,对空中目标的作战意图进行识别不仅是战场态势评估的主要目的,更是防空作战指挥决策的重要基础。随着空中威胁的日益严峻,单纯依靠指挥员的作战经验对空袭目标的作战意图进行识别已经难以适应防空作战高强度、快节奏的要求,如何利用先进的数据融合技术辅助指挥员识别敌方的作战意图,已经成为目前战场态势评估迫切需要解决的问题[1-3]。
1 目标意图识别问题概述
1.1 目标意图识别的定义
目标意图即目标试图完成的任务或目标为达到某种作战目的而采取的一系列作战行动和计划。目标意图并不能被直接观测,通过各种探测手段,能直接观测到的只是目标的特定作战行动或目标状态的改变,而这些活动则反映了目标的作战意图[4]。对敌作战意图的识别就是在战场环境下对各种信息源得到的信息进行分析,从而对敌方的作战设想、作战方式、作战计划以及要达到的目标进行的判断和解释[5]。
1.2 基于事件的目标意图识别
由于目标意图总会在一定程度上通过目标的行动和状态表露出来,因此对目标的意图识别可以从以下几个方面考虑:
(1)目标的运动状态;
(2)战场上发生的事件;
(3)敌作战条令及战术原则。
可以说,目标意图总是和某些事件相关联,反之,通过发生的事件也可以推理出相应的目标意图,而这正是意图识别的基础。在防空作战中,敌目标在作战过程中会不断出现加(减)速、拐弯、爬升、俯冲、雷达开(关)机等行为变化,这些行为都可能反映目标实际的作战意图,将这些行为称之为事件。在这些事件中,有些可以被直接探测,称为原子事件;而另外一些则是由其他具有时间或因果关系的事件聚合而成的,这些事件不能被直接探测,称之为复合事件。
为研究方便,本文对原子事件进行了分类定义。根据事件表达内容的不同,原子事件可分为过程事件、状态改变事件和实体关系事件。过程事件反映的是实体属性在一定时间间隔内的变化量,如目标加(减)速、拐弯、爬高、俯冲等,以目标加(减)速事件为例,当目标速度在相邻探测时间间隔内的变化值超过规定的判别门限时,即判定事件发生,过程事件与时间相关,具有一定的连续性;与过程事件不同,状态改变事件反映的是实体状态瞬时的变化,如目标出现、消失、干扰源开(关)机、雷达开(关)机等,状态改变事件不受时间积累的影响,即与目标之前的状态无关;实体关系事件反映的是目标与我方实体之间的关系,如目标进入我防空武器射击区域、我方实体位于敌导弹发射角内等。
复合事件是由其他事件关联得到的,其组成可以是原子事件,也可以是复合事件,从这个意义上说,复合事件是具有层次性的。举例来说,在防空作战中,敌飞机对我进行导弹攻击可以看作是目标意图的一种,其本身就是一个复合事件,与之关联的子事件至少应包含敌导弹满足发射条件和敌雷达锁定我目标2个复合事件,同样,作为子事件,敌导弹满足发射条件也是由若干事件关联得到的,其中应包含我实体位于敌导弹发射角内和我实体在敌导弹射程内这2个原子事件。可见,无论是原子事件还是复合事件都不是互相孤立的,它们之间存在着时间和因果关系,事件关联的目的就是利用事件之间的关系将低层次的原子事件逐步聚合成高层次的复合事件,而目标意图识别就是在事件关联的基础上,从原子事件(证据)出发,逐层推理,最终得到代表目标意图的复合事件(结论)的过程。
2 空中目标意图识别的贝叶斯网络模型
2.1 贝叶斯网络的构成
贝叶斯网络(Bayesian networks,BN)是概率论和图论相结合的产物,作为一种知识表示和概率推理的框架,贝叶斯网络在具有不确定性的推理和决策问题中得到了广泛的应用[6]。贝叶斯网络主要由两部分构成,分别对应问题领域的定性描述和定量描述:一部分为有向无环图(directed acyclic graph,DAG),通常称为贝叶斯网络结构,它由若干个节点和连接节点的有向弧组成,节点与知识领域的随机变量一一对应,有向弧表示变量间的因果关系,弧的指向代表因果影响的方向性(由父节点指向子节点);另一部分为反映变量之间关联性的局部概率分布,通常称为条件概率表(conditional probability table,CPT),表中的概率值表示子节点与其父节点之间的关联强度或置信度[7-8]。图1显示的是一个简单而典型的贝叶斯网络模型。

图1 Bayesian网示例Fig.1 Sample of Bayesian network
2.2 贝叶斯网络的构建
构建空中目标意图识别的贝叶斯网络模型,需要经过以下3个步骤:
(1)确定节点及节点状态
对于空中目标意图识别来说,节点代表的就是防空作战中可能发生的事件。在现实中,事件的发生常常具有多种情况,相应的,网络中的节点也可以有多个状态,这些状态之间彼此独立,每个都代表了一种假设。举例来说,如果将“敌飞机对我地面目标的攻击方式”作为意图识别的顶层事件,那么它对应的节点就可能包含“使用导弹攻击”和“使用投弹方式攻击”2种状态。
(2)确定节点关系
在确定了节点事件之后,接下来需要明确的是各个节点事件之间的因果关系。这些关系用有向弧表示。例如,当敌飞机意图对我进行投弹攻击(记为事件X)时,通常会先进行俯冲(记为事件Y),基于这种影响关系,如果将前者作为“原因”,那后者就是“结果”,两者之间的关系可以用有向弧X→Y表示。
(3)节点概率分配
概率分配包括两部分内容:对没有父节点的顶层事件指定先验概率;对有父节点的事件指定条件概率,如图1所示。需要说明的是,对于有多个状态的节点,其概率分布应包含该事件处于相应状态集合中每个状态的概率值。节点概率通常在网络初始化时由防空作战专家根据经验指定,这一过程使贝叶斯网络模型从一开始就包含了相关的领域知识。
2.3 基于贝叶斯网络的目标意图识别
在利用贝叶斯网络进行问题求解时,那些值已确定的变量构成的集合称为证据D,需要求解的变量集合称为假设X,基于贝叶斯网络的目标意图识别就是求解给定证据(已发生的战场事件)的条件下假设变量(目标意图)的后验概率P(X|D)[9]。
设防空作战中敌目标可能的作战意图为A1,A2,…,Am,当探测到战场事件B时,利用贝叶斯条件概率公式,可得目标意图的后验概率[10]为
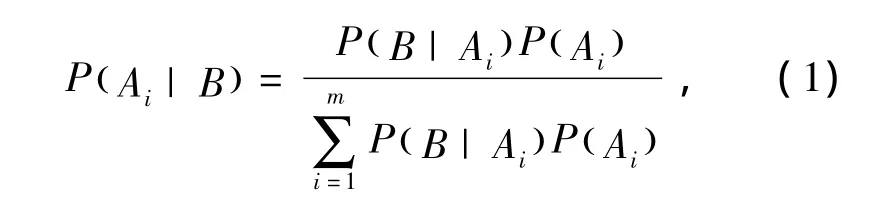
式中:P(Ai)为目标意图的先验概率;P(B|Ai)为条件概率,先验概率和条件概率都是由防空专家根据经验预先指定的。
假如在探测到事件B时,又得到一个事件C,则此时目标意图的后验概率为

实际上,在进行目标意图识别时,仅仅根据经验确定事件B和C同时发生的先验概率P(B∩C|Ai)是非常困难的。为了简化计算,可以假设战场事件之间是相互独立的,通过对目标意图识别问题进行分析可知,大部分战场事件都应该是相互独立的(如“敌飞机爬高”和“敌飞机俯冲”),这一点也可以在构建网络过程中通过指定节点事件来实现。
根据概率公式,B,C相互独立,可得

推广到一般情况:当探测到的战场事件分别为B1,B2,…,Bn时,可得目标意图的后验概率为

在网络初始化时,目标意图和战场事件的置信度都是预先给定的,当检测到新的战场事件后,事件(证据)对目标意图(假设)的影响可通过贝叶斯后向传播来更新,直到目标意图中的某个假设(节点状态)的置信度超过了预先设定的阈值,则判定该目标意图成立。目标意图识别是一个动态的、按时序处理的过程,其识别可信度随时间的增长而提高。
3 应用示例
3.1 贝叶斯网络建模
考虑这样一个想定:敌飞机进攻我地面目标,其进攻意图分为“投弹攻击”和“使用导弹攻击”2个状态,与之相关联的事件分别是敌飞机的机动方式、雷达工作状态以及敌飞机与我方目标的位置关系。根据想定,可以建立图2所示的目标意图识别的贝叶斯网络。
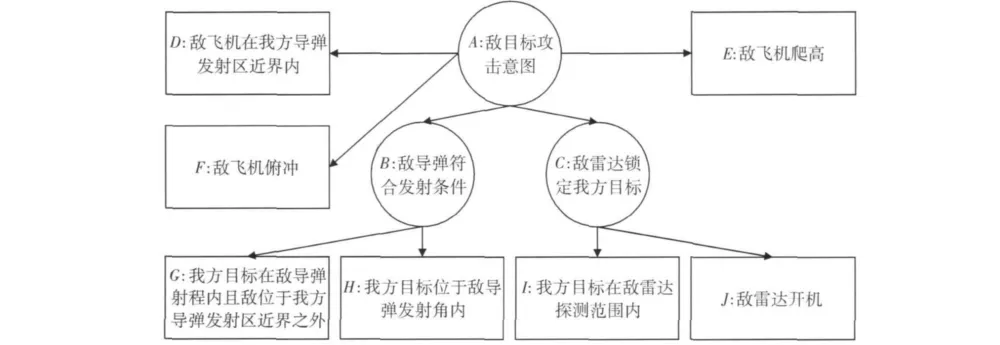
图2 目标意图识别的贝叶斯网络模型Fig.2 Bayesian network model of target’s intention assessment
为了体现复合事件和原子事件的层次关系,图中分别用了2种节点进行表示:复合事件用圆形节点表示,原子事件用方形节点表示。另外需要说明的是,本例的主要目的在于方法研究,因此模型经过了适当的简化,并没有对所有与目标意图有关的事件进行穷举。
3.2 节点概率分配
在进行节点概率分配时,除代表目标意图的节点以外,其他事件节点可以只考虑2个离散状态,即真和假。在对网络进行初始化时,需由防空专家指定每个节点的条件概率表,本例假定敌目标攻击意图的先验概率为:敌对我进行投弹攻击和使用导弹向我攻击的概率均为0.5。其余节点的条件概率可按相同方法依次指定,分配结果见表1。
3.3 目标意图识别
假设在防空作战中,我传感器探测到以下事件:敌飞机爬高、敌雷达开机、我方目标在敌雷达探测范围内、我方目标在敌导弹射程内且敌位于我方导弹发射区近界之外。利用贝叶斯网络推理工具Bayesialab计算得到的敌目标意图的后验概率如图3所示。
结果表明,当检测到敌飞机爬高、雷达开机等战场事件后,敌方使用导弹向我攻击的置信度变为89.17%,相比证据输入前明显增大了。
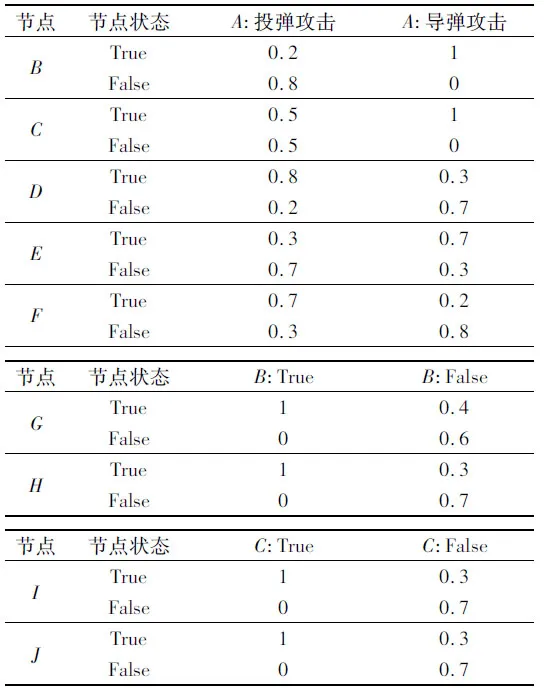
表1 目标意图识别的条件概率Table 1 Conditional probability of target’s intention assessment

图3 仿真结果Fig.3 Result of simulation
4 结束语
贝叶斯网络使用图形化的模型对领域知识进行表达,同时通过具有语义性的推理逻辑对问题进行求解,作为一种推理模型,贝叶斯网络在处理不确定性信息方面具有优势,因而能够很好的满足目标意图识别的需求。本文提出的基于贝叶斯网络的空中目标意图识别方法具有很强的可操作性,将其应用到实践中,可以大大提高防空作战指挥决策的自动化程度,因此具有十分重要的意义。
[1] HATAKEYA N,FURUTA K.Bayesian Network Modeling of Operator’s Intent Inference[C]∥New Orleans,USA:IEEE 7th Human Factors Meeting,2002:55-60.
[2] GORODETSKY V,KARSAEV O,KOTENKO I.Multiagent Information Fusion:Methodology,Architecture and Software Tool for Learning of Object and Situation Assessment[C]∥San Diego,CA,USA:Proceedings of the 7th International Conference on Information Fusion,2004:346-353.
[3] BALL B,SANTOS E,BROWN S.Making Adversary Decision Modeling Tractable with Intent Inference and Information Fusion[C]∥Sevilla,Spain:Proceedings of the 11th Conference on Computer Generated Forces and Behavioral Representation,2002:535-541.
[4] NGUYEN T,HEUER P.Automated Intent Assessment Simulation Environment[C]∥ Las Vegas:Proceedings of Information,Decision and Control,2002:395-400.
[5] 王端龙,吴晓锋,冷画屏.对敌战场意图识别的若干问题[J].舰船电子工程,2004,24(6):4-8.
[6] 王三民,王宝树.贝叶斯网络在战术态势评估中的应用[J].系统工程与电子技术,2004,26(11):84-87,143.
[7] 史忠植.知识发现[M].北京:清华大学出版社,2002.
[8] 张连文,郭海鹏.贝叶斯网引论[M].北京:科学出版社,2006:34-35.
[9] 吴霁.态势评估关键技术的研究[D].西安:西安电子科技大学,1996.
[10] 肖秦琨,高嵩,高晓光.动态贝叶斯网络推理学习理论及应用[M].北京:国防工业出版社,2007.
猜你喜欢
法律方法(2022年2期)2022-10-20 06:42:20
军事文摘(2022年11期)2022-06-24 09:22:46
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:16
福建基础教育研究(2022年4期)2022-05-16 08:48:40
军民两用技术与产品(2021年10期)2021-03-16 06:05:10
法律方法(2021年3期)2021-03-16 05:56:58
数理化解题研究(2017年4期)2017-05-04 04:07:54
铁道通信信号(2016年6期)2016-06-01 12:10:20
电子器件(2015年5期)2015-12-29 08:43:15
郑州大学学报(理学版)(2014年2期)2014-03-01 04:20:49
