
姿控发动机布局方式研究*
2012-01-01 05:51石凯宇程英容张奕群
现代防御技术 2012年2期
石凯宇,程英容,张奕群
(北京电子工程总体研究所,北京 100854)
0 引言
大气层外飞行器的姿态控制是飞行控制系统的重要组成部分。在大气层外,由于缺乏空气动力,飞行器的姿态控制一般通过安装在其尾部的姿控发动机的开关动作来实现[1]。在姿控发动机的布局设计中,需要关心的问题包括姿控发动机的数目、姿控发动机的安装位置以及安装角度。由于布局方式对姿态控制的控制效果和控制成本有着直接的影响,对其研究具有很大的工程应用价值。
1 国内外姿控发动机布局方案研究
姿控发动机的布局设计包括姿控发动机数目的选取、姿控发动机的安装位置以及安装角度的设计。姿控发动机的数目一般有四、六、八等,安装位置有集中布局和分散布局2种,安装角度有“横平竖直”安装和“倾斜”安装2种。本节以姿控发动机数目的演变为主线,介绍目前国内外几种有代表性的姿控发动机布局方式。
四姿控发动机布局是实现飞行器三通道可控的最小发动机布局形式[2],采用该布局形式的飞行器中最典型的是火箭达因公司研制的供演示和验证用的大气层外飞行器[3],图1为该飞行器姿控发动机布局后视图,它采用了四姿控发动机倾斜布局形式。

图1 四姿控发动机分散倾斜布局Fig.1 Separated and tilted layout of four-ACTs
由于四姿控发动机布局形式的飞行器在抗干扰能力和平稳性等方面都有不足,因此,现在已经停止研制和使用。
六姿控发动机布局方案也是大气层外飞行器经常采用的方案。由美国雷声公司研制的一种大气层外飞行器[4],采用六姿控发动机分散布局形式。图2是文献[4]所采用的姿控发动机布局示意图。其中 1#,3#,4#,6#发动机控制滚转和偏航,而 2#,5#号发动机控制俯仰。其姿控发动机采用了2种推力水平,俯仰通道的推力为滚转和偏航通道的2倍,以确保俯仰通道有足够的控制能力。

图2 六姿控发动机横平竖直分散布局Fig.2 Separated horizontal and vertical layout of six-ACTs
六姿控发动机分散布局形式有利于减小滚转方向的控制力矩,提高滚转通道的控制平稳性,但同时给发动机燃料输送管道的设计带来了一定的困难。为了降低制造难度,“T”型布局应运而生[5],如图3所示。该布局实现了横平竖直集中布局方式。相对于“分散布局”,该布局形式将3个发动机集成为一组,便于制造和安装,而缺点是滚转通道的控制力矩较大,平稳性较差。
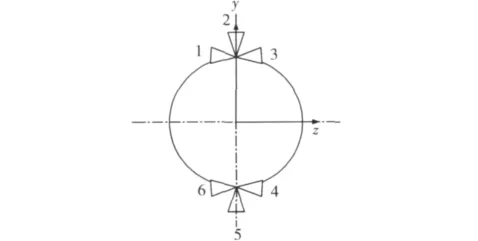
图3 六姿控发动机布局“T”型布局Fig.3 “T”style layout of six-ACTs
八姿控发动机布局形式也是目前常用的一种方案[6]。一种轻型外太空飞行器[7]所采用的典型八姿控发动机布局如图4所示。该布局实际上是在六姿控发动机“T”型布局的基础上增加了7#,8#发动机。如果用1#,3#,4#,6#发动机专门控制滚转,而7#,8#发动机控制偏航,2#,5#发动机控制俯仰,则可实现三通道的独立控制,从而简化姿控发动机的开关逻辑的设计。但是,这种简化以增加发动机的数目为代价。
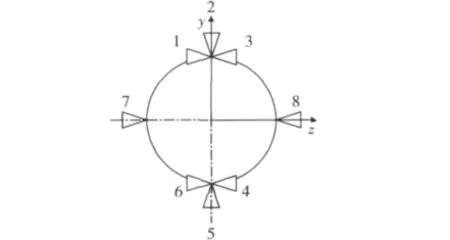
图4 八姿控发动机横平竖直分散布局Fig.4 Separated horizontal and vertical layout of eight-ACTs
以上介绍了国内外几种典型的发动机布局方案。当然,还存在其他多种姿控发动机布局方案。在姿控发动机布局设计中,应该考虑哪些因素?如何评价布局的优劣?本文在工程实践的基础上,提出了3个对立因素,下一节将进行详细阐述。
2 姿控发动机布局方案研究
姿控发动机的布局设计,本质上就是对飞行器三通道的控制力矩进行设计。设计控制力矩要考虑的因素很多,其中包括飞行器大角度机动时的快速反应能力、稳态控制精度和平稳性、对轨控发动机干扰的抑制能力、对故障的容错能力等,而这些因素往往是彼此对立的。
本节首先分析了稳态控制精度、平稳性、机动性以及抗干扰能力之间的定量关系,在此基础上,讨论布局需要考虑的3个对立因素,并提出解决这些矛盾的方法和设计应该遵循的原则。
2.1 控制指标的定量分析

图5 无干扰力矩的极限环Fig.5 Limit cycle without disturbance torques

随后,飞行器开始反向运动,到达C点时发动机关机,角速度变为-,飞行器开始以-的角速度开始惯性飞行,直到D点发动机再次开机,相轨迹沿着D→A运动到A点,完成一个循环。观察半个循环E→A→B→F阶段,有

式中:tf为A→B段飞行器惯性飞行的时间。
简化后,有

关于公式(2),有如下说明:
2.2 布局需要考虑的3个对立因素
(1)快速性与控制精度之间的矛盾
在飞行器进行大角度机动时,要求其有足够的快速反应能力以尽快消除姿态偏差。因此,姿控发动机必须给飞行器提供足够大的控制力矩以产生大的姿态角加速度a。但是在飞行器平稳飞行阶段,姿态控制的目的是保持姿态稳定,此时对飞行器的控制精度成为主要考虑的一个因素,希望θp越小越好。
由公式(2)可知,a与θp成正相关关系。一个极端的情况是tf=0时,此时发动机总是处于频繁开机状态,a与θp成正比。在其他条件相同的情况下,增大a会导致θp相应增大,即提高机动性是以牺牲控制精度为代价的。这是一对必须考虑的矛盾,解决这一矛盾的一个思路是变推力或者改变发动机最短开机时间。其实就冲量而言,变推力与变最短开机时间是等效的。当需要大角度机动时,采用较大的发动机推力来产生较大的角加速度a;需要保证稳态控制精度时,采用较小的发动机推力来降低 θp。
(2)控制平稳性与抗干扰能力之间的矛盾
平稳性是飞行器稳态飞行需要考虑的一个重要因素。平稳性好,一方面可提高导引头对目标的识别效果,另一方面可避免姿控发动机频繁开机而造成燃料的过度消耗。这就要求尽量小。由公式(1)可知,与a成正比,因此a要尽量小,即控制力矩尽量小;在飞行器进行轨道修正时,轨控发动机开机。由于轨控发动机的推力偏心以及飞行器的质心漂移,轨控发动机开机时会产生干扰力矩,对飞行器的姿态造成较大的扰动。此时姿控发动机必须产生足够大的控制力矩抵消干扰力矩的影响[9]。工程实践表明控制力矩至少是干扰力矩的1.5倍。
飞行器平稳飞行要求控制力矩尽量小,而抗干扰则要求控制力矩尽量大,这又是一对矛盾。解决这一矛盾的一个思路同样是变推力。
(3)布局成本与控制效果的矛盾
姿控发动机的数目选择也是一个非常关键的问题。理论上,发动机的数目越多,可提供的控制选择就越多,就越可能通过布局的合理规划,为控制提供更好的结构条件,控制效果也就越好。但是,随着发动机数目的增多,飞行器的质量也随之增大,同时飞行器制造难度也随之提高,布局的成本随之增大。而工程上,在满足系统要求的前提下,优先考虑的是简单可靠、成本低,而非片面地追求高性能。这就要求尽量减少发动机的数目,这样可以简化飞行器的设计,降低成本。因此布局的低成本和控制效果的改善之间存在一定的矛盾。解决这一矛盾的思路是变推力,如果推力可以任意连续变化,便可以用较少发动机获得很满意的控制效果。
2.3 矛盾的解决思路——利用耦合
以上三对矛盾的根源在于需要在不同情况下采用不同的控制力矩。变推力或者变发动机开机时间虽然是解决这些矛盾的思路,然而变推力技术尚不成熟,发动机的最短开机时间也不能无限缩短,因此无法解决这些矛盾。在目前的技术条件下,合理利用耦合是解决这些矛盾的一个可行途径。
在以往的设计中,一般考虑尽量避免一个姿控发动机同时控制多个姿控通道,即通道间是独立的、解耦的[10]。这样做的好处是避免了通道间的相互影响,开关逻辑也相对简单。以如图4所示典型的八姿控发动机“横平竖直”布局形式为例。如果2#,5#发动机单独控制俯仰,1#,3#,4#,6#发动机单独控制滚转,7#,8#发动机单独控制偏航,通道间可实现独立控制,达到人为解耦控制的效果。然而解耦带来的问题是在某一个通道上只能产生一组控制力矩,例如,利用1#、4#发动机同时控制滚转时,可能会造成控制力矩过大,产生较大的,影响控制的平稳性。如果利用1#,3#,4#,6#发动机同时控制滚转和偏航,即对这2个通道进行耦合控制,不仅可以去掉7#,8#发动机,而且在一个姿控发动机同时控制2个通道时,可降低其在每一个通道的控制力矩从而提高控制的平稳性。
合理利用耦合,还可以提供更为丰富的控制力矩档位选择。以图3所示的“T”型布局为例:
如果通道是独立控制的,在滚转通道上,只能存在1#,4#发动机对开或者3#,6#发动机对开的情形,控制力矩档位只有1种。同理,在偏航通道上也只有一种控制力矩档位;而如果通道是耦合控制的,在滚转通道上,既可以1#,4#发动机对开或者3#,6#发动机对开,又可以只开其中一个,这样,就存在2种控制力矩。在偏航通道亦然。由此可见,通过利用耦合,使得在滚转和偏航通道上都增加了控制力矩档位,这样就可以在大角度机动或者大干扰存在时使用较大的控制力矩,在平稳飞行时采用较小的控制力矩。这将大大提高滚转和偏航的控制效果。
当然,利用耦合为控制器的设计带来了一定的困难,如果控制器设计不好,可能会适得其反。这就要求进一步提高控制器的设计水平。
2.4 姿控发动机布局基本原则
飞行器姿控发动机布局方式的设计是一个比较复杂的问题,需要兼顾很多因素。通过分析,飞行器姿控发动机的布局设计应该遵循以下基本原则:
(1)尽量增大最大控制力矩;
(2)尽量减小最小控制力矩;
(3)尽量增加控制力矩的档位选择。
3 耦合效果的仿真分析
利用耦合是解决姿控发动机布局设计矛盾的一种有效途径。为了考察耦合对姿态控制的效果,本文采用图3所示的“T”型布局形式的飞行器进行仿真。
考察2种方案:方案一采用三通道独立控制的方式;方案二则利用了姿控发动机在滚转和偏航通道间的耦合控制。
在无干扰的情况下,姿态角跟踪精度和最大角速度仿真结果见表1。
由表1可知,在无干扰时,方案二较方案一在3个通道的稳态跟踪精度和平稳性均有明显的改善。

表1 无干扰时的姿控性能Table 1 Attitude control performance without disturbance turques
为了观察在干扰存在时的抗干扰能力,在仿真中引入常值干扰。仿真得到的姿态角跟踪精度和最大角速度如表2所示,各通道的姿态角以及角速度变化曲线如图6~9所示。
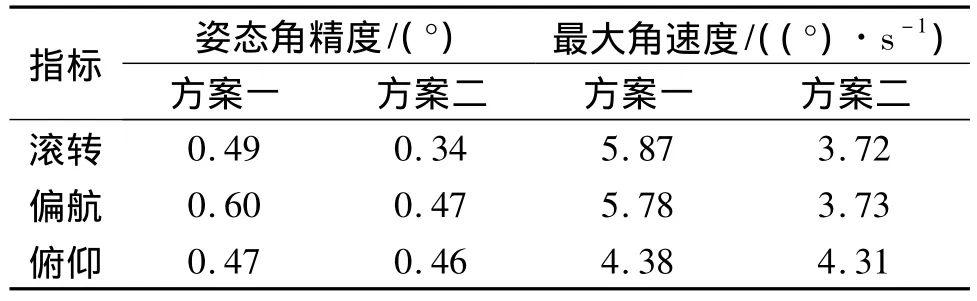
表2 有干扰时的姿控性能Table 2 Attitude control performance with disturbance torques

由图6~9以及表2可知干扰存在时,方案二在滚转和偏航通道上的姿态角跟踪精度和平稳性均比方案一效果好,因此在抗干扰能力方面要优于方案一。在俯仰通道上,2种方案效果并无明显的差别,这是因为无论耦合控制还是独立控制,对俯仰通道并无影响。

由图6,7还可以看出,在方案一中,偏航通道响应滞后于滚转通道的响应。这是由于方案一采用三通道独立控制,遇到滚转和偏航都需要大角度机动的情况,就需要设计成滚转优先造成的。这也是三通道独立控制的弊病,而采用耦合控制,则可以避免这种情况的出现。
4 结束语
姿态控制技术是控制系统的关键技术之一,而姿控发动机的布局为飞行器姿态控制提供了硬件条件。姿控发动机布局的优劣,直接影响到飞行器姿态控制效果。姿控发动机的布局设计既需要考虑控制性能要求,又需要结合现有的技术水平和设计经验,综合考虑各种因素,在各种要求下寻找折中方案。利用耦合可以在一定程度上提高控制效果,是一个值得深入研究的控制策略。
[1] 郭清晨.常值推力姿态控制方法研究[D].哈尔滨:哈尔滨工业大学,2006.
[2] RICARDO S,Sanchiez Pena,Roberto Alonso,et al.Robust Optimal Solution to the Attitude/Force Control Problem[J].IEEE Transaction on Aerospace and Electronic System,2000,36(3):784-791.
[3] 王建德,包立平.新概念武器在地面防空中的应用(中)[J].地面防空武器,2000,(4):12-29.
[4] PRINS W,SPENCER A,ROBERTS J.SM-3 SDACS Flight Test Successes[R].AIAA 2003-4 664.
[5] 程英容,张奕群.基于四元数反馈线性化的飞行器姿态控制方法研究[J].航天控制,2007,25(107):14-16.
[6] 胡小平,王中伟,张为华,等.姿控发动机布局方式优化分析[J].国防科技大学学报,1997,19(2):5-9.
[7] WEISS H.Status of the First LEAP Space Flight Test[R].AIAA-92-1 069.
[8] 奚勇,张巍巍.一种用于导弹姿态控制系统的直接力非线性控制法[J].上海航天,2007,(3):42-45.
[9] 图善澄.卫星姿态动力学与控制[M].北京:中国宇航出版社,2005:184.
[10] 程英容,张奕群.考虑姿控发动机布局耦合影响的飞行器姿态控制方法研究[J].现代防御技术,2008,36(5):41-45.
猜你喜欢
中国特种设备安全(2022年2期)2022-07-08
科技与创新(2020年19期)2020-10-09
现代商贸工业(2020年24期)2020-07-17
铁道运营技术(2020年2期)2020-04-08
电子技术与软件工程(2018年6期)2018-02-23
山东青年(2016年12期)2017-03-02
北京航空航天大学学报(2016年9期)2016-11-16
航天制造技术(2016年6期)2016-05-09
北京航空航天大学学报(2016年3期)2016-02-27
北京航空航天大学学报(2016年3期)2016-02-27
