
导航级微型核磁共振陀螺仪技术综述*
2012-01-01 05:50龚云鹏高雁翎
现代防御技术 2012年2期
龚云鹏,高雁翎
(1.北京电子工程总体研究所,北京 100854;2.中国航天科工集团二院二O八所,北京 100854)
0 引言
近30年来美军依赖全球定位系统(GPS)在各类制导弹药的导航与制导系统中应用,取得了良好的效果;但当GPS受到强干扰或GPS星座安全受到威胁时,依赖于GPS精确定位的制导武器作战效能将大大下降。美国国防高级研究项目局(defence advanced research projects agency,DARPA)在定位(positioning)、导航(navigation)和授时(timing)方面的微技术(micro-PNT)项目开发的初衷正是为了克服GPS在受到强干扰或GPS星座受损而失效的潜在威胁而设置的[1];看起来似乎又回到了研发自主式(self-contained)惯性导航和精确制导的技术途径上来了;其实不然,DARPA对技术创新的要求是通过微制造技术将所有必须的组件封装成为一个的小型的、低功耗的、片式(chip-scale)的、高精度的惯性测量组合。这种片上(on-chip)IMU的标定要考虑常值误差修正以提高精度;而为了解决对自标定所要求的超低漂移敏感器的问题,也都需要创新[2]。
DARPA的某项目负责人安德瑞(Andrei Shkel)谈到了最新的研发进展时说:“微型核磁共振陀螺利用核子在磁场中的陀螺式的自旋确定指向。这种陀螺没有机械旋转部分,且对过载和振动不敏感。其它种类的,诸如基于硅片的MEMS陀螺,对振动太敏感,难以满足性能要求。DARPA对微型核磁共振陀螺仪的研发与应用有很高的期待。”
1 基本原理
核磁共振(nuclear magnetic resonance,NMR)陀螺仪的技术基础是核磁共振;核磁共振基本原理清楚了,核磁共振陀螺仪的基本原理就容易理解了。
1.1 核磁共振原理
所有具有自旋特质的原子核所产生的磁矩μ(是矢量,相当于机械陀螺体的动量矩H)其取向与自旋轴的方向一致,是任意的,如图1a)所示。
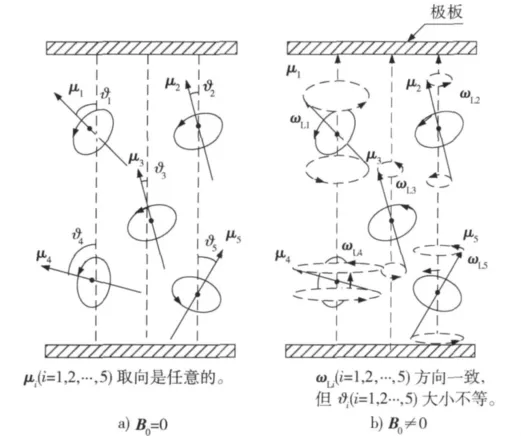
图1 核磁共振原理示意图Fig.1 Schematic diagram of NMR
而当它们处于磁场强度为B0的静磁场中时,每一个具有磁矩的自旋原子核都像一个个小陀螺一样绕B0矢量方向进动,称该进动为RLarmor进动,进动角频率ωL称为RLarmor频率,是矢量;其方向与B0一致,大小为

式中:γ为磁旋比,是核的特征常数,与核的运动无关,不同的原子核 γ 值不同[3-4]。
虽然这些自旋原子核进动角频率ωL大小和方向相同,但它们的自旋轴方向,即各自的磁矩μ的方向与B0的夹角ϑ是不同的,如图1b)所示。
根据量子力学原理,原子核磁矩μ与外加磁场B0之间的夹角ϑ不是连续变化的,而是量子化的;正是夹角ϑ的量子化的“跳变”反映了自旋原子核能量的跃迁。由经典力学原理

式中:L为磁矩μ和磁场B0相互作用产生的力矩。
此力矩L使自旋角动量P变化,即

可见夹角ϑ越大,自旋原子核能量越大。
这时,如果在已有的静磁场B0的基础上再加上一个与静磁场方向正交、角频率为ω0的交变电磁场B1(t),这些自旋方向各不相同,但进动方向一致的核子会吸收该特定频率的电磁能量,产生能级跃迁,从较低的能级跃迁到较高能级。称这一物理过程为核磁共振。
简言之,处于静磁场中的磁矩不为零的原子核在另一特定频率交变电磁场作用下,会吸收该特定频率的电磁波能量,从较低的能级跃迁到较高能级;这一过程称为核磁共振,这就是核磁共振基本原理[5]。
1.2 核磁共振陀螺仪原理
基于核磁共振的原理设计、制造而成的陀螺仪称之为核磁共振陀螺仪(nuclear magnetic resonance gyro,NMRG)[6-7]。
如上所述,原子核进动的频率ωL是由外加磁场强度B0和原子核本身的性质决定的;也就是说,对于某一特定原子,在一定强度的外加磁场B0中,其原子核自旋进动频率ωL的方向与B0一致,大小是固定不变的。如果核磁共振陀螺仪本体坐标系的x轴与B0取向一致,当陀螺仪绕x轴转动,转动角速度为ω时,核磁共振陀螺仪的光电探测器检测到的转动角速度ωj为

由此可得

这就是利用核磁共振原理测量绕x轴转动角速度ω的核磁共振陀螺仪工作原理,原理示意图如图2所示。可见,核磁共振陀螺仪是单轴速率陀螺仪[8]。
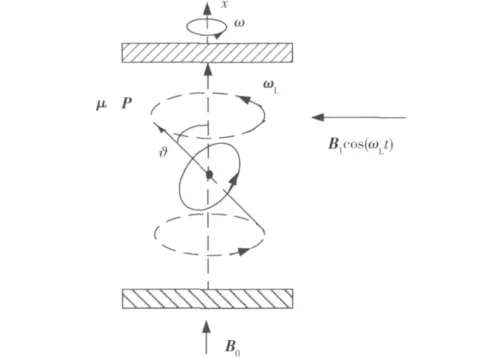
图2 核磁共振陀螺仪原理示意图Fig.2 Schematic diagram of NMRG
2 发展现状
目前,核磁共振技术已在物理、化学、材料科学、生命科学和医学等领域中得到了广泛应用。核磁共振陀螺仪技术在美国等西方发达国家受到相当的重视。早在20世纪60年代美国的一些高等院校和研究机构即开始研究 NMRG;1979年 Litton和Singger-Kearfott成功研制出样机,并取得了专利;精度达到了导航级[9]。
进入新世纪以来,随着微米、纳米技术和MEMS制造工艺的快速发展,微型核磁共振陀螺仪的研发成为惯性技术领域的新热点,很自然地成为美国DARPA的主抓项目之一。
DARPA与诺斯罗普·格鲁曼公司签约为DARPA的Micro-PNT项目研发微型、导航级核磁共振陀螺仪,为高精度导航而体积、功耗受限的军事装备中应用[10]。
诺斯罗普·格鲁曼公司研发核磁共振陀螺的第一阶段始于2005年10月。最终将确定可独立(stand-alone)工作的核磁共振陀螺的结构。所研发的核磁共振陀螺仪,其性能与体积、功耗相当的导航级光纤陀螺相比是相当的(见图3)。
近年来,加州大学伯克利分校,电子工程系以Andrei Shkel教授(也是DARPA的NMRG项目负责人)为带头人的Shkel实验室的研究人员对微型NMRG进行了较深入的研究,做了大量的实验,取得了多项技术成果,并于2009年底申报了专利[11]。

图3 诺斯罗普·格鲁曼公司研制的微核磁共振陀螺仪Fig.3 NMRG designed by company Northrop Grumman
Shkel实验室研制的微型NMRG就结构而言,其基本组成有3部分[12]:
(1)装有1个垂直腔表面发射激光(vertical cavity surface emitting laser,VCSEL)光源和4个光电探测器的底板;
(2)1/4波长(晶)片;
(3)NMR腔。
NMRG结构如图4所示。

图4 Shkel实验室研制的微核磁共振陀螺仪结构图Fig.4 Schematic diagram of NMRG designed by Shkel lab
该微型NMRG的VCSEL光源发出线偏振光,通过位于VCSEL上方的1/4波长(晶)片变成圆偏振光;该偏振光射入封装有核子气化物的NMR腔内,核子气化物处于NMR腔内的2个玻璃极板之间,为核磁共振的发生提供了条件。
在静磁场B0和脉冲磁场B1作用下(如图4)圆偏振光强被调制在NMR腔内气化物的RLarmor频率ωL上。NMR腔的4个面作为微反射器使调制光返回到光电探测器。当陀螺仪以角速度ω转动时,光电探测器检测到的光强变化圆频率为ωj。
利用光电探测器获取的ωj和已知产生NMR的核子气化物的RLarmor频率ωL,即可得

目前,研发的微型NMRG样机精度已达到导航级。
3 关键技术
要研制微小型、高精度的NMRG须突破以下技术关键:
(1)微加工技术
将已有的NMRG技术成果微小型化,首先要突破微加工技术。例如 Shkel实验室研制的微型NMRG,其主要的技术关键之一是NMR腔的刻蚀。在1 mm厚叠合而成的硅基片上刻蚀出一个底边长1.8 mm见方的‘金字塔’形的空腔(如图5),且对腔体内的4个面及其角度的加工精度要求很高,因为这4个面均为圆偏振光的反射面,且要经过2次反射(如图6)。
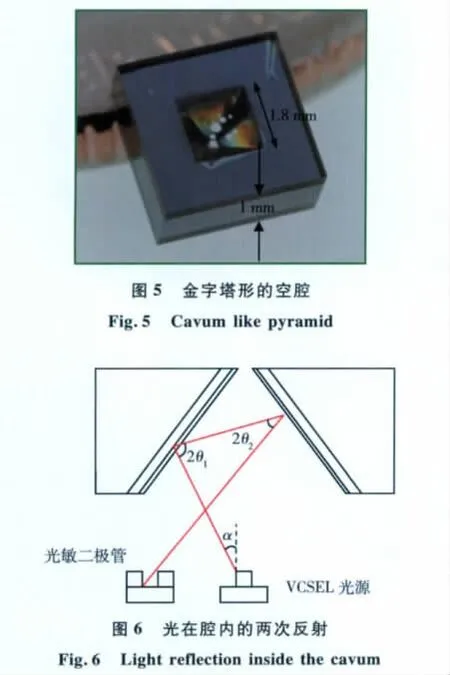
置于VCSEL光源上方的1/4波长(晶)片的加工精度是确保线偏振光转为圆偏振的关键环节。微加工的缺陷对光反射率和极化状态均会造成不良的影响。
(2)包层的设计与工艺实现
为了提高NMRG的灵敏度、分辨率和精度,须减少光在NMR腔内两次反射的能量损失;为此,在NMR空腔的4个内壁上需加高反射率包层。该包层设计成由一摞厚度不等,分别为LH和LL、反射率不同,分别为nH和nL的多个薄层相间配置而成(如图7),且满足

式中:λ0为波长。
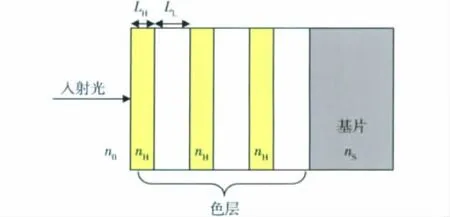
图7 色层结构示意图Fig.7 Schematic diagram of color layer
注意到,层数越多,nH和nL之差越大,反射率R则越高。这一方法可将无包层的裸硅反射面在腔体内经过两次反射近造成的90%的光功率损失减少到小于10%。维持高的光强,可抑制光电探测器的噪声;实现这一设计的制作工艺难度很大。
(3)规避对静磁场的苛刻要求
由式(1)可见,RLarmor频率ωL与B0直接相关,为了提高NMRG的测量精度,要求B0有很高的稳定性;且ωL的选取应与NMRG的测量范围相匹配,为此要求B0有极低的数量级。要满足对静磁场B0的这些苛刻要求是很困难的。解决这一难题的技术途径之一是选用两种核子的气化物作为NMR腔的工作物。例如Shkel实验室研制的微NMRG,就选用了铷和氙。于是有

式中:ωLr,ωLx分别为铷、氙的 RLarmor频率;ωjr,ωjx分别为光电探测器检测到的光通过铷、氙2种工作物后光强变化圆频率;γr,γx分别为铷和氙的磁旋比。
联立(7)、(8)两式,求解可得

由式(9)可见,ω 只与 γr,γx和 ωjr,ωjx有关,而与静磁场强度B0无关。
(4)微型NMRG的标定技术
是NMRG实现产业化必须解决的关键技术。
4 结束语
为该项目最近研发出的微型核磁共振陀螺性能指标已达到惯导级,与目前所用的惯导级惯性测量组合相比在尺寸、质量、功耗等方面小2个数量级,这就使其应用于个人导航系统、GPS不受用(GPSDenied)导航系统和微-UVA系统的实现成为可能。微型NMRG技术走向成熟,最终实现产业化,必将在惯性技术领域引发出革命性的变化。
[1] Micro-PNT program.[EB/OL].[2011 -09 -27].http://www.darpa.mil/Our_Work/MTO/Programs/Micro-PNT_program.aspx.
[2] DARPA的定位导航技术取得突破进展[EB/OL].[2011-08-06].http://www.81tech.com/2011/0806/43243.html.
[3] 核磁共振原理[EB/OL].http://baike.baidu.com/view/1474000.htm.
[4] 王逗.核磁共振原理及其应用[J].现代物理知识,2005,17(05):50-51.
[5] 邓明成,靳强.核磁共振的原理和应用[J].现代物理知识,1998,10(02):10-13.
[6] 中国惯性技术学会.惯性技术辞典[M].北京:中国宇航出版社,2009:215.
[7] 程向红.核磁共振陀螺仪分析及发展方向[J].中国惯性技术学报,2006,14(6):86-90.
[8] 陈红梅,程向红,员亚利.低温超导核磁共振陀螺仪模型[J].中国惯性技术学报,2008,16(2):228-232.
[9] 景尧.核磁共振(NMR)技术的研究与发展[EB/OL].[2011 -10 -25].http://www.docin.com/p -240157726.html.
[10] Northrop Grumman Awarded Contract to Continue Development of Micro-Gyro for DARPA Program[J/OL].[2010-07].http://www.gpsworld.com.
[11] John Kitching,Elizabeth A Donley,Eleanor Hodby.Compact Atomic Magnetometer and Gyroscope Based on a Diverging Laser Beam[P] .US No.20090039881,2009-02-12.
[12] Uyen Nguyen Huynh.Study of Factors Affecting Performance of Spin-Polarized Atomic Gyroscopes[EB/OL].[2011 -05 -24].http://www.physorg.com/news/2011-05-micro-gyro-technology-darp a.html.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
百科探秘·航空航天(2017年9期)2017-12-31
百科探秘·航空航天(2017年9期)2017-11-07
弹箭与制导学报(2017年3期)2017-11-01
雷达学报(2017年1期)2017-05-17
少儿科学周刊·少年版(2016年4期)2017-02-15
中学生数理化·中考版(2016年8期)2016-12-07
山东工业技术(2016年15期)2016-12-01
现代防御技术(2014年4期)2014-07-10
现代防御技术(2014年6期)2014-02-28
