
基于人工势场法的移动机器人路径规划研究
2011-12-27 01:05连翠玲
河北省科学院学报 2011年4期
王 帅,连翠玲,赵 旭
(河北省科学院自动化研究所,河北石家庄 050081)
基于人工势场法的移动机器人路径规划研究
王 帅,连翠玲,赵 旭
(河北省科学院自动化研究所,河北石家庄 050081)
人工势场法是移动机器人路径规划的一种常用方法,是势场法思想的起源,是最基础的方法。笔者利用人工势场法原理对移动机器人路径规划进行了研究,并通过MATLAB进行仿真。
人工势场法;避障;MATLAB;仿真
机器人的路径规划在移动机器人的研究中是一个重要的领域。其目的是在有障碍物的环境中选择出一条路径使机器人不碰障碍物[1]。目前,移动机器人路径规划分为两部分:已知环境信息的全局路径规划和知或部分可知环境信息的局部路径规划[2]。在环境信息比较全面的情况下,机器人的路径规划离线行进,即使用一定的算法,根据周围相关的环境信息状况为机器人设计出一条可行的行进路径[3],常用的方法有快速随机树随机位图法、人工势场法、栅格法方法等[3];当移动机器人对环境信息部分了解时,机器人需要通过传感器对环境进行探测,即在线规划。本文试图利用工人势场法原理对移动机器人路径进行规划研究。
1 势场分布算法的讨论
机器人的路径规划,是使用一定的算法,根据周围相关的环境信息状况为机器人设计出一条可行的行进路径[4]。而算法的基础是对势场分布的研究计算。
1.1 引力
目标点的引力引导移动机器人走向目标点,具有导航的作用,对移动机器人的运动的大方向起主导作用。
当离目标点较远时,引力场方向设为以目标点为中心,指向目标点,呈辐射状,大小恒定的引力场;而离目标点一定距离内的地方设为方向仍指向目标点,呈辐射状,引力的大小与离目标点距离的平方呈反比的势场。如公式(1):

其中F为目标点引力场向量;x k1为引力常数,他们的大小与斥力系数有密切关系;l为移动机器人指向目标点的向量,大小是移动机器人与目标点之间的距离。
1.2 斥力
障碍物的斥力场是移动机器人避开障碍物的主要凭借。障碍物斥力场的公式如式(2):

l是移动机器人与障碍物连线方向指向障碍物,大小是距离的向量;cl k1是斥力系数,与引力系数有关,可通过实验仿真取得的。斥力的大小在计算时按实际雷达扫描的情况,应从障碍物的边界算起。
斥力场大小仿真:
由引力势场大小的仿真和斥力大小的仿真可以看出,大多数的障碍物处吃力都很大,移动机器人很容易避开障碍物,目标点的引力在离目标点远的地方有值,在目标点处迅速增大,保证移动机器人到达目标点,见图1所示。
2 机器人路径选择的研究
2.1 机器人与障碍物距离
移动机器人与障碍物的距离分三种情况。移动机器人距离障碍物较远时,应忽略障碍物;离障碍物距离适中时,按势场线的方向行进;距离障碍物的距离很近时,要以避开障碍物为首要问题,遵循势场线为辅助。
移动机器人和障碍物的距离是移动机器人能避障的最直接变量,也是机器人安全行进的最后一道屏障。
2.2 机器人与目标点距离
移动机器人与目标点的距离确定了计算机所建的移动机器人的数学模型与障碍物的数学模型比例和引力场的变化,同时也影响到了移动机器人所走的最大步数。
如前所述,引力场的大小也会随着移动机器人距离目标点距离的变化而改变。在移动机器人进入一定的范围后,引力场系数迅速增大,引力也会随与目标点的距离成平方的反比而变化。
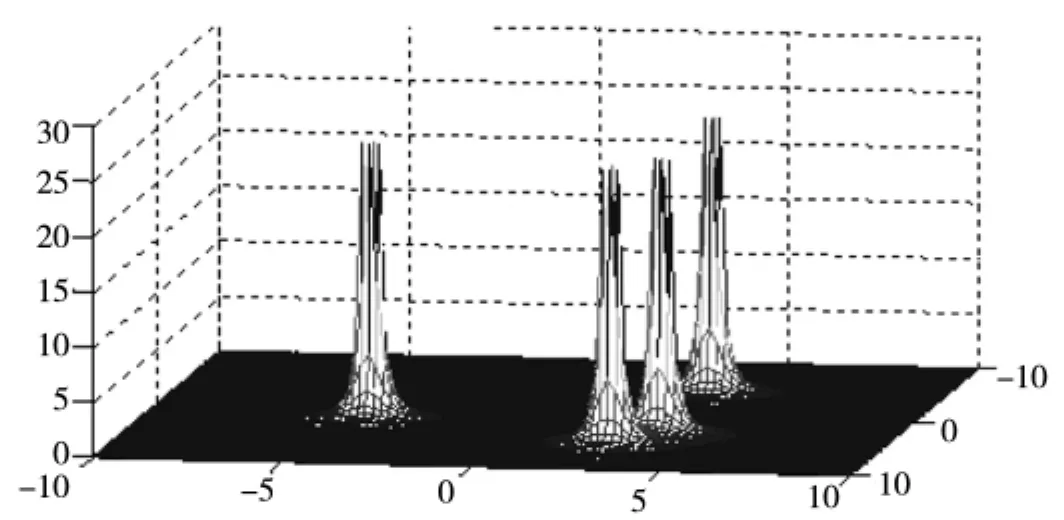
图1 斥力场
3 实验仿真
现实生活中,移动机器人遇到的环境是多种多样的,障碍物的出现也有很大的随机性,需要尽量地考虑到各种情况,所以要对多种情况进行计算分析和仿真。
人工势场法机器人路径规划方针结果见图2。
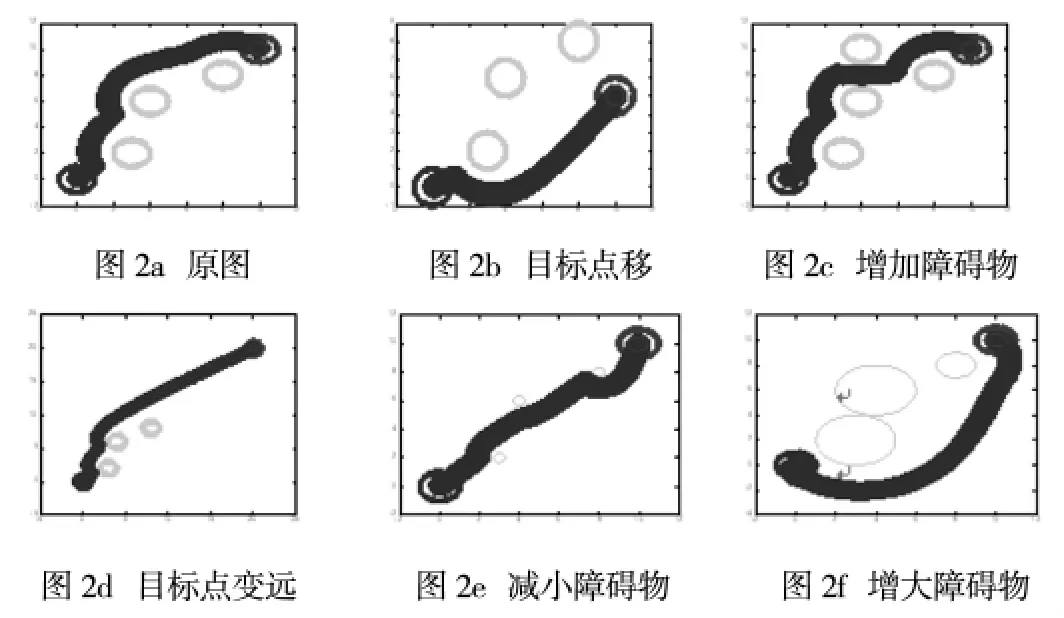
图2 几种一般情况的对比
4 结论
本次是基于人工势场法的移动机器人路径规划研究。首先,人工势场法的基本思想有很多优点,很有价值研究;其次,人工势场法的势场函数对整个规划起主要作用,不断地对其进行改进能使移动机器人的路径规划更加完善;再次,用MATLAB进行仿真画出了机器人行进轨迹,清楚地看到了人工势场法的优点和缺点;最后,找出了一种在一定范围内比较好的路径规划方案。
[1]张建英,赵志萍,刘暾.基于人工势场法的机器人路径规划[J].哈尔滨工业大学学报,2006(8):1306-1309.
[2]黄炳强,曹广益.基于人工势场法的移动机器人路径规划研究[J].计算机工程与应用,2006,42(27):26-28.
[3]Park MG,Jeon JH,Lee M C.Obstacle avoidance for mobile robots using artificial potential field approach with simulated annealing[J].IEEE International Symposium on Industrial Electron its,2001,3(6):1530-1535.
[4]李智也.移动机器人路径规划问题的解决方案[J].计算机工程,2006,32(1):189-192.
Study of path planning for mobile robot based on artificial potential field
WANG Shuai,LIAN Cui-ling,ZHAO Xu
(InstituteofAutomation,HebeiAcademyofSciences,ShijiazhuangHebei050081,China)
The artificial potential field law is the most foundation method of all.It is the potential field law thought origin.the research and the simulation are conducted to the artificial potential field law in this paper.
Ar tificial potential field law;Avoid the obstacle;MATLAB;Simulation
TP249
:A
1001-9383(2011)04-0064-03
2011-06-30
王 帅(1987-),男,河北石家庄人,助理工程师,主要从事自动控制类产品的开发研究.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
北京航空航天大学学报(2021年4期)2021-11-24
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
成都信息工程大学学报(2019年3期)2019-09-25
石油地球物理勘探(2017年4期)2017-12-18
制造技术与机床(2017年3期)2017-06-23
系统工程与电子技术(2016年4期)2016-08-24
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28
中国海洋大学学报(自然科学版)(2014年7期)2014-02-28
