
仿真技术在电力拖动实验教学中的应用
2011-12-25 05:21:34卢卫娜陈秀敏马玉泉宋冬冬张丽红
大学物理实验 2011年6期
卢卫娜,陈秀敏,马玉泉,宋冬冬,张丽红
(河北科技师范学院,河北 秦皇岛 066600)
仿真技术在电力拖动实验教学中的应用
卢卫娜,陈秀敏,马玉泉,宋冬冬,张丽红
(河北科技师范学院,河北 秦皇岛 066600)
将计算机的仿真技术应用于电力拖动自动控制系统的实验教学中,设计了基于Matlab/Simulink仿真的电力拖动实验,并详细介绍Matlab仿真过程和双闭环调速系统的仿真实验案例。设计的实验方案将虚拟实验和物理实验相结合,形成了完整的新型教学体系,改善了传统实验模式的局限与不足。
电力拖动;Matlab/Simulink仿真;实验;双闭环调速
传统的电力拖动物理实验教学主要是以教师讲解实验内容、演示实验过程、部分学生按既定步骤接线、得出事先已经确定的实验结果、分析产生实验报告为主线开展和进行。这种教学模式以体积大、数量少的电力拖动实验设备为依托,学生围观听课的形式居多,参与动手实验的机会较少;参与的学生对系统不够熟悉,由于时间限制,不能够完成实验接线,往往走马观花,得不到很好的实验效果。近年来,计算机技术的发展给高校的实践教学环节带来了新的方法。仿真实验教学结合了先进的教学思想和现代化教学手段,充分发挥了计算机的优势,解决了传统中实验设备不足、实验过程套化、实验内容分散等问题,培养了学生的动手能力、创新能力和综合分析能力。
为此,我们重新对电力拖动实验特点进行分析,将虚拟实验和综合实验系统相结合[1],设计了具有开放性、创新性和综合性的MATLAB仿真实验。充分融合了课堂理论教学、课下作业、仿真实验和实验台操作的授课环节,将原本各自孤立的学习过程很好地统一、结合起来,成为完整的教学体系。
1 仿真实验教学的方案设计
仿真实验进行时,要求学生在老师指导下,分成实验小组,然后按下列步骤完成实验:(1)教师预先在理论课上讲授系统的设计原理和方法、布置具体的设计任务作为课下作业,学生在完成作业的同时,根据作业的设计任务和结果,制订实验预案,从而起到了对实验进行预习铺垫的作用。(2)学生在教师或实验师的指导下,独立完成实验。将上一步的设计结果用于实验过程,通过Matlab仿真验证系统设计的正确性和运行特点,记录实验数据和结果。(3)将仿真实验的虚拟系统在硬件实验台上进行物理实现,通过具体的装置接线和调试,观察电机拖动系统的运行情况和性能指标。(4)完成实验结果的分析讨论,写出完整的实验报告,包括实验目的、实验原理、实验内容和各环节的实验数据或图片。通过这样的实验过程,使学生加深对系统的熟悉程度,从而加快了实验进程,确保有限的实验时间里获得更好的实验效果。
在教学过程中,可结合仿真分析不同情况下的控制系统所获得的运行效果。实验项目可以包括;MATLAB软件和SIMULINK仿真环境认识实验;转速反馈控制(单闭环)直流调速系统仿真;转速、电流反馈控制(双闭环)直流调速系统的仿真;异步电动机的仿真;交流电机矢量控制系统的仿真;直接转矩控制系统的仿真。在此,我们仅以双闭环转速/电流反馈控制直流调速系统为例,介绍具体的实验内容设计。
2 仿真实验的实例分析
2.1 双闭环直流调速系统的工程设计
以双闭环直流调速系统的工程设计为实验案例,在Matlab/Simulink仿真环境下,完成对电动机的电流和转速的反馈控制。例如,某一个实验小组采用晶闸管供电直流双闭环调速系统,整流装置采用三相桥式电路,系统参数如下:
直流 电 动 机:220V,136A,1460r/min,Ce=0.132Vmin/r,允许过载倍数λ=1.5;晶闸管装置放大系数:Ks=40;电枢回路总电阻:R=0.5Ω;时间常数:Ti=0.03s,Tm=0.18s;电流反馈系数:β=0.05V/A(≈10V/1.5IN);转速反馈系数α=0.007Vmin/r(≈10V/nN)。
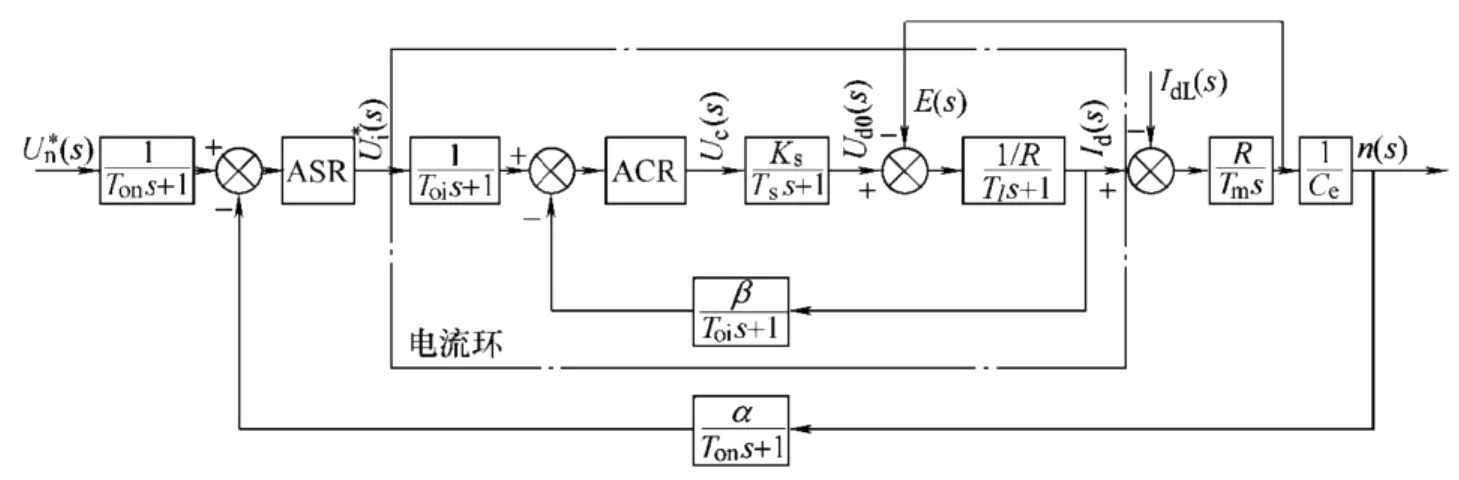
图1 双闭环直流调速系统的结构图
2.2 电流环仿真系统设计
(1)建立如图2所示的系统模型结构。
给定信号U*i=10V,故设置step模块的终值(Final value)为10,饱和非线性模块(Saturation)的其饱和上界(Upper limit)和下届(Lower limit)参数分别设置为限幅值+10和-10。

图2 电流环的仿真系统结构图
(2)选中Simulink模型窗口的Simulation→Configuration Parameters菜单项,设置仿真过程的开始时间和停止时间。一般地,Simulation time选择Start time为0,Stop time可以根据实际需要而定,一般只要能够仿真出完整的波形即可。本仿真中Sart time和Stop time栏目分别填写为0.0s和0.05s,所选择的算法为ode45。
(4)调节器参数的调整。令KT=0.25,则PI调节器的传递函数为0.5067+,Ki=1.013,τi=0.03s;令KT=1.0,则PI调节器的传递函数为2.027+,Ki=2.027,τi=0.03s。观察各组参数下的响应曲线。选出一组控制效果最佳的曲线参数,作为下一步转速环仿真中的电流调节器ACR。scale)调整示波器模块所显示的曲线。
2.3 转速环的仿真系统设计
(1)建立如图3所示的系统模型结构。
(2)仿真模型从Signal Routing组中选用了Mux模块来把几个输入聚合成一个向量输出给Scope,以便在示波器模块中反映出转速、电流的关系。
(3)根据初步的设计结果,PI调节器采用传递函数为11.7+,K=11.7,τ=0.087s。nn
(4)双击阶跃输入Step模块把阶跃值设置为10,观察空载启动时的转速和电流的响应曲线。
(5)把负载电流IdL(Step1模块)设置为136,满载启动,观察其转速与电流响应曲线。
(6)对转速环抗扰过程进行仿真,当电动机空载启动后再将负载电流IdL(s)的输入端加上负载电流,观察空载运行中受额定电流扰动时的转速与电流响应曲线。
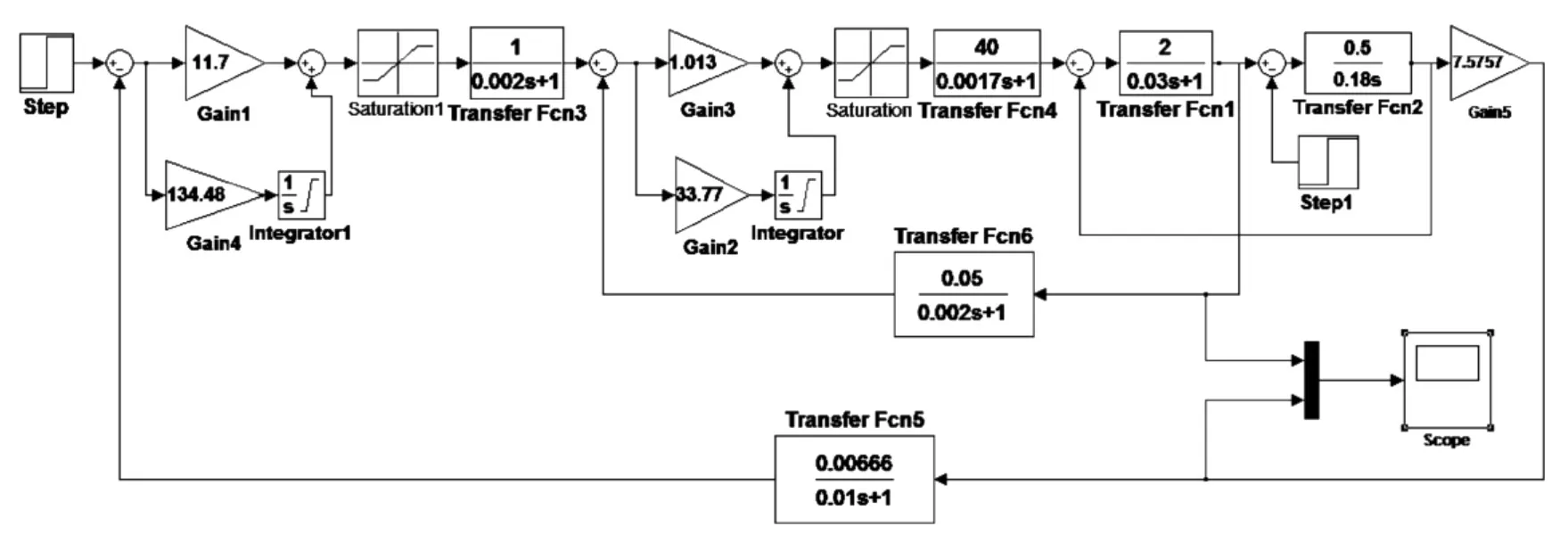
图3 转速环的仿真系统结构图
2.4 仿真实验结果
电流环仿真实验在三组参数下产生的电流响应曲线如图4所示。在直流电动机的恒流升速阶段,三组电流的稳态值均低于λIN=200A,其原因是电流调节系统受到电动机反电动势的扰动,它是一个线性渐增的扰动量,所以系统做不到无静差,而是Id略低于Idm。通过比较得出,(a)图响应无超调,但上升时间长;(b)图响应略有超调,上升时间不太长;(c)图响应上升时间简短,但超调量大,已经出现震荡。所以,当KT=0.5,即Ki=1.013,τi=0.03s时,控制电流的效果最好。
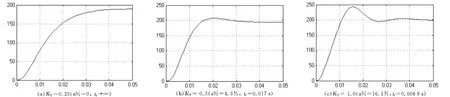
图4 电流环仿真结果
转速环仿真的实验结果如图5所示,双闭环直流调速系统在电流环的调节作用下,使得转速最终稳定在给定转速上,转速值为额定转速1460r/min,属于无静差调速。此外,无论电机是空载起动还是满载起动,都经历了电流上升、恒流升速、转速调节这三个阶段,每个阶段转速和电流的变化特点与理论分析的结果完全一致。需要注意的是,第I阶段的电流上升时间非常短暂,图中未能清晰显示,经图形放大后可以读出空载起动时t1=0.01s.,满载启动时t1=0.02s。可知,空载起动所需的时间远小于满载启动的时间。
利用转速环仿真模型还可以对转速环抗扰过程进行仿真,它是在空载运行过程中输入负载电流IdL。图6是转速环抗扰仿真结果,包括转速和电流的响应曲线。在t=1s时刻加入负载电流IdL扰动,系统经过约0.2s的调节后,又恢复了稳态运行。
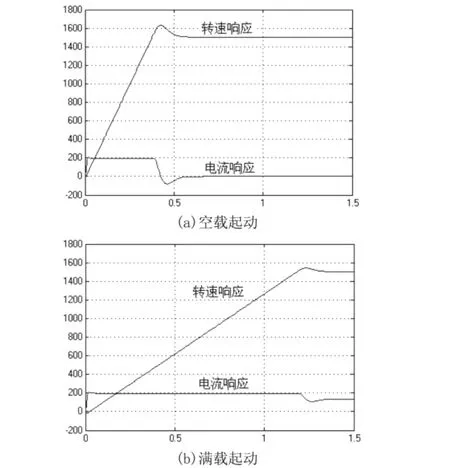
图5 转速环仿真结果
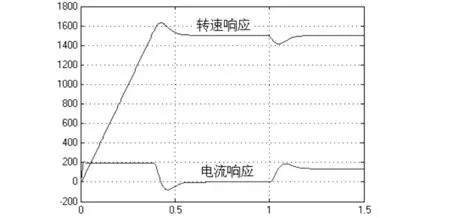
图6 转速环的抗扰过程仿真结果
3 实验效果和总结
在“电力拖动自动控制系统”的实验课程中,增加了Matlab仿真实验环节。经试行后,取得了良好的教学改进效果。首先,学生在实验的过程中,形成了一种探索、学习、研究的活跃氛围。通过对实验教学内容和模式的改进,将设计性实验、综合性实验和探究性实验加入新的实验教学体系中。学生由被动接受知识变为通过思考、设计和尝试来主动获取知识,是一种全新的体验。其次,Matlab虚拟仿真使用模块化的图形搭构,方便且形象化,可视可读性强,修改起来也极为方便[4],新的思路和想法可以立时通过虚拟试验加以验证,这对学生创新能力的培养可以起到很好的促进作用。再次,仿真实验在计算机平台上进行[5],不需要大量的仪器和设备,可以弥补实验设备的不足。将虚拟实验和传统的物理实验相结合,优势互补,学生在理论分析和实际动手能力两方面都得到提高。
同时,新的实验模式将理论授课、课下作业和学生实践结合起来,形成统一的教学体系,不仅巩固了学生对课程知识点的理解,而且使学生掌握了一种工程设计方法和重要的应用工具,充分提高了教学质量和学生工程实践能力的培养,其重要意义不容忽视。
[1]木合亚提·伊克山.电力拖动自动控制系统课程实验的改革[J].实验室研究与探索,2010(12):67-69.
[2]孙亮.MATLAB语言与控制系统仿真[M].北京:北京工业大学出版社,2006.
[3]陈伯时.电力拖动自动控制系统[M].3版,北京:机械工业出版社,2004.
[4]洪乃刚.虚拟实验在电力拖动自动控制课程教学中的应用[J].安徽工业大学学报:社会科学版,2004(3):21-24.
[5]顾春雷,陈中.电力拖动自动控制系统与MATLAB仿真[M].北京:清华大学出版社,2011.
Application of Simulation Technology in Electric
Drive Experiment Teaching
LU Wei-na,CHEN Xiu-min,MA Yu-quan,SONG Dong-dong,ZHANG Li-hong
(Hebei Normal University of Science and Technology,Hebei QinhuangdaO066600)
The computer simulation technology is used in the experiments of electric drive automatic control system.A design of experiment teaching based on Matlab/Simulink simulation is presented.The Matlab simulation process and experiment case for the engineering design of double closed loop speed regulation system are both introduced in detail.The experiment plan combines virtual experiment and physical experiment together,and forms a complete new teaching system.Thus,the limitation and shortage of traditional experimental mode are greatly improved.
electric drive;matlab/Simulink simulation;experiment;double closed loop speed regulation
TM921
A
1007-2934(2011)06-0055-04
2011-08-17
*通讯联系人
猜你喜欢
测控技术(2021年10期)2021-12-21 07:10:20
甘肃教育(2020年4期)2020-09-11 07:42:36
物理之友(2020年12期)2020-07-16 05:39:20
甘肃教育(2020年8期)2020-06-11 06:10:04
通信电源技术(2018年3期)2018-06-26 06:33:32
黑龙江电力(2017年1期)2017-05-17 04:25:05
中国教育技术装备(2016年11期)2016-12-01 06:53:03
环境科技(2016年5期)2016-11-10 02:42:12
电源技术(2015年11期)2015-08-22 08:50:36
电测与仪表(2015年10期)2015-04-09 11:48:02
