
异步电机软启动的瞬时功率理论控制律
2011-12-23 00:52邳志刚
黑龙江科技大学学报 2011年4期
邳志刚
(黑龙江科技学院 工程训练与基础实验中心,哈尔滨 150027)
异步电机软启动的瞬时功率理论控制律
邳志刚
(黑龙江科技学院 工程训练与基础实验中心,哈尔滨 150027)
异步电机软启动过程中定子电压和定子电流发生畸变,影响电机的启动性能且产生谐波污染。基于瞬时功率理论,以三相异步电机为研究对象,通过动态方程获得了功率因数函数的数学模型,给出了电压电流和功率的仿真曲线,获得了新的软启动控制律。仿真结果表明,电机启动的不同阶段,新控制律能提高有用功的传递,从而验证了该控制律的有效性。
异步电机;瞬时功率;软启动
0 引言
为了改善电机的启动性能,异步电机特别是大容量异步电机的启动过程需要采用降压或限流等软启动控制方式。异步电机的启动性能一般要求[1-2]:(1)电机的启动电流能被控制,(2)启动装置简单可靠,(3)电机的启动转矩振荡尽可能小,(4)启动过程中的电机和驱动器的功率损耗小。无论采用何种控制方式,都会造成定子电压和定子电流的瞬时畸变。这种畸变意味着由于驱动装置的逆变作用,具有较多高次谐波分量的电流会被直接注入电网。该现象不仅会影响电机在启动过程中的性能,更会造成电网的谐波污染。
从能量的角度分析,异步电机软启动相当于将电机作为非线性负载,利用具有三相拓扑结构的电力换流装置将三相电网的能量均匀有序地供应给异步电机。电机在宏观上呈现感性负载的特性,在启动过程中互感矩阵是与时间和空间位置有关的三角函数。这些因素导致电机的数学模型呈现出明显的非线性。因此,软启动控制能量传输的过程同样具有非线性和时变性的特点。目前,国内外有关异步电机软启动方面的研究十分广泛,理论上大多基于从改善电机软启动性能的角度出发,改进软启动控制算法[3-4]。实践方面大多采用半控型或全控型电力电子器件作为固态启动器[5]。从无功和有功功率方面讨论电机软启动的文献较少。
基于上述因素,笔者提出基于瞬时功率理论[6-8],将软启动过程中电网传递给电机的能量分解为无功部分和有功部分,根据电能无功和有功的数学定义,建立了表征能量分布的功率因数函数,通过优化功率因数,建立了一种新型的软启动控制律,并通过计算机仿真进行验证。仿真曲线说明,无论是采用降压法还是限流法进行软启动,无功能量的最终效能是建立旋转磁场,有功能量的最终效能是传递电能。新的软启动控制律能够在一定程度上提高有用功的传递并改善启动性能。软启动的最佳效果是,尽可能快地建立旋转磁场,同时尽可能均匀地向电机传递电能,其最佳工作点与电机的转速和电机自身的参数有关。
1 异步电机的数学模型
1.1 数学模型的推导
异步电机的数学模型具有非线性。以鼠笼式异步电机为例,此时转子绕组短接。在启动阶段,作约束条件:(1)忽略铁损,(2)忽略磁饱和,(3)电源和绕组均三相对称并忽略空间谐波,(4)电机参数不随温度摄动。满足上述4个条件后,根据d-q坐标系的动态方程,当电机参数已知时,可取udr=uqr= 0,得到电机状态方程:
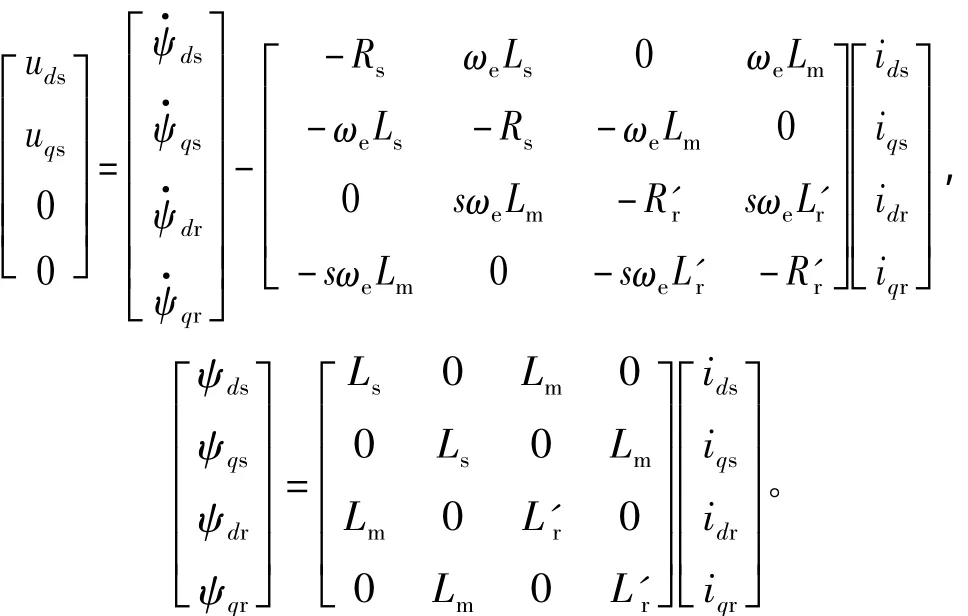
启动过程中,转子频率ωr随时间线性增加,且ωr的变化率与电流的变化率相差104数量级,因此,电流作为状态变量的状态方程为

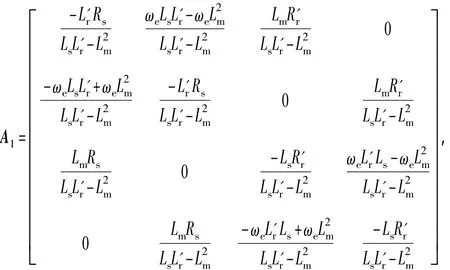
将式(1)化为标准的状态空间形式:

式(2)中,状态量为X=[idsiqsidriqr]T,控制量为U=[udsuqs0 0]T,系统矩阵A1、A2和控制矩阵B分别为:

式中:uds、uqs——定子d、q轴电压;
ids、iqs——定子d、q轴电流;
ψds、ψqs——定子d、q轴磁通;
udr、uqr——转子d、q轴电压;idr、iqr——转子d、q轴电流;
ψdr、ψqr——转子d、q轴磁通;
Rs、R'r——定子、转子电阻;
Ls、L'r——定子、转子电感;
Lm——等效互感;
ωe、ωr——旋转磁场、转子角频率;
s——转差率。
1.2 有功功率和无功功率的数学描述
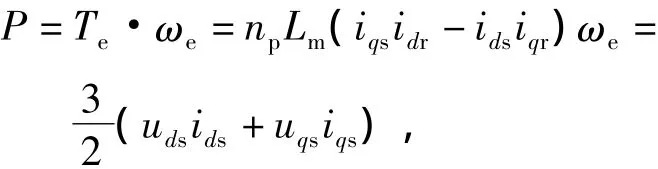
按照瞬时功率理论中功率的定义,电机吸收电网的有功部分用来产生电磁转矩。运动方程和电磁转矩方程为:
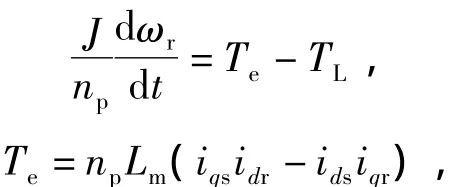
于是电机的有功功率为
式中:np——极对数;
Te、TL——电磁、负载转矩;
P——有功功率。
电机无功功率Q和有功功率P与视在功率S存在三角关系,无功功率为
2 基于能量分布的优化函数
2.1 功率因数函数
从瞬时功率理论的角度分析,电机启动过程中从电网吸收的能量分布具有不同的功能。能够求解出P和Q,就可以充分表征电机启动过程的性能。基于有源功率滤波器设计和虚电流补偿控制算法的p-q理论能够分解出α-β轴上的电压和电流分量,这些分量再经过Clarke变换就可以转化为d-q坐标系的分量。分析可知,电机的有功和无功功率分别与电机在d-q坐标系下的电压和电流分量有关。在坐标变换式中,这些分量分别代表着旋转坐标系下的直流分量。若直接对这些量进行计算和分析,势必要求解电机的状态方程,尽管初始条件可以限定,但是这一过程需要根据矢量分解原理进行坐标正反变换,数学计算量大,所得结果没有普遍意义。为此,需要进行某种变换,将不易求解的P和Q转化为易于求解的物理量。
电机的功率因数是表征电机能量分布的重要指标,其数值的大小不仅反映了电机的运行性能,更反映了电机从电网获得的能量以怎样的形式进行分配。
根据瞬时功率理论,电机的功率因数应为有功功率与视在功率的比值。因此有

将式(3)进行化简得到
式(4)中ωr+ωs=ωe,由于没有采用变频,旋转磁场角频率ωe为恒值,因此功率因数就只与电机参数和转差频率ωs有关,当电机参数已知时,选取ωs为待优化变量,就可以获得功率因数的极值,同样可以获得和。
2.2 优化功率因数
从式(4)可以看出,电机的功率因数实际上是与电机的电气参数、ωr和ωs有关的非线性表达。这是一个具有普遍意义的待优化目标函数,优化变量为ωr和ωs。即寻找到一组最佳的()组合,使得功率因数cos φ1在()下最大。常用的优化方法为梯度下降法。即首先选择一个初始点,以选定的步长Δωr和Δωs确定下一个状态点所得结果为正,说明该方向为函数值减小的方向,则按照该方向继续同样步骤。如果所得结果为负,说明该方向为函数值增大的方向,则按照相反的方向继续同样步骤,直到找到函数值最小点为止。基于上述考虑得到了如图1所示的优化函数结果仿真曲线。图1中的电机参数:Rs=3.315 Ω,R'r=3.183 Ω,Lm=0.190 H,Ls=0.096 H,Lr=0.096 H,转动惯量J=0.512 kg·m2,负载阻转矩TL=6 N·m,电源角频率ωe=314 rad/s。其中,最佳功率因数点对应的转子频率和转差频率最佳组合点为(=198 rad/s,=116 rad/s)。
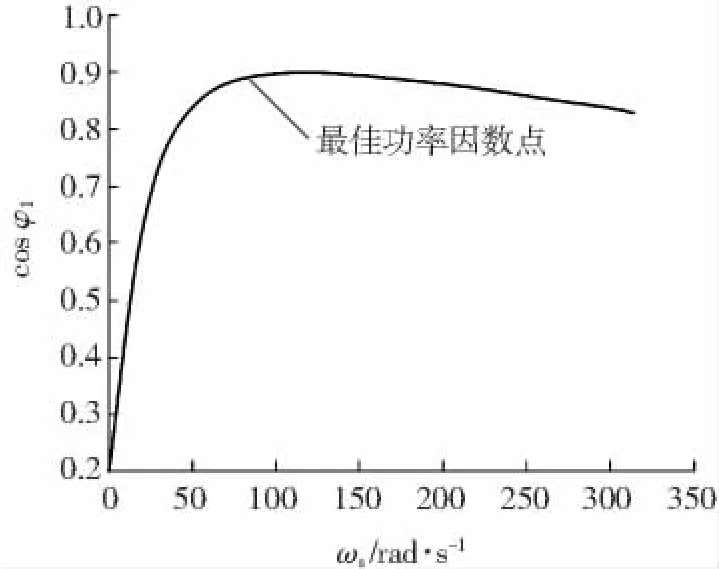
图1 优化函数结果仿真曲线Fig.1 Simulation results of optimized function
3 软启动控制律
3.1 基于功率因数角反馈的软启动控制律
2.2节的分析表明,功率因数函数优化的结果在于:(1)一旦确定了电机参数,就可确定优化变量(ωr,ωs)和待优化函数 f(ωr,ωs)的非线性关系。(2)依据梯度下降法即可求解f(ωr,ωs)的极值,由于图1所示的功率因数曲线为一个凸函数,在自变量的定义域内,有且仅有一个最佳值,因此可以通过有限次的迭代计算获得这一最佳值,从而确定(,)。控制作用就是已知()时,控制电机的转速并使其接近最佳转速值从而实现功率因数函数的最大化。异步电机的软启动对电机转速的要求并不高,因此将转速作为反馈量较难实现有效控制。由于三相软启动器的实际控制量是可控硅的触发角α,故将功率因数角作为反馈量,新的软启动控制律为

其中,k为采样时刻,kp为比例因子,其值的大小决定软启动的时间。式(5)说明cos φ*是最大的功率因数,即φ*此时最小。当前时刻测得的功率因数角φ(k)比最佳值φ*大,即当前时刻电机的功率因数小于最佳的功率因数,表明电机从电网获得的能量主要用于建立旋转磁场,此时应进一步加大定子电压即减小触发角,令电机尽快建立旋转磁场。而一旦当前时刻的功率因数角φ(k)于最佳值φ*接近,即当前时刻电机的功率因数接近了最佳的功率因数,表明电机的旋转磁场已经建立,此刻应维持α (k),增加电机的电流从而令有用功P进一步增加,完成整个软启动过程。
3.2 仿真结果
所有仿真曲线都截取了某一个工频电网周期。定子电压和电流的仿真曲线(图2)中,触发角控制在30°~90°,电机参数同2.2节,三相电源为交流工频峰-峰值380 V。在启动初期(α=90°时),旋转磁场刚刚建立,定子电压和电流波形畸变严重,斩波特性明显,此时电机的功率因数较小,应增加触发角的变化量。在启动的在中后期(α=60°时),旋转磁场已经建立,定子电压幅值的变化较小。此时电磁转矩的增加取决于定子电流。在启动的后期(α=30°时),随着电机功率因数的进一步提升并接近最佳值,电机的定子电压和电流波形渐趋平稳,直至启动过程结束。控制算法使得电机的转差频率不断接近功率因数最佳时对应的值,因此,随着触发角的不断减小,瞬时有功功率不断上升(图3)。由于三相电网的总瞬时功率即视在功率S=UI在电机启动和调速的过程中基本不变,瞬时有功功率所占份额不断提高,其接近理论计算的最优点,即功率因数不断提高,进一步验证了该控制方法的有效性。
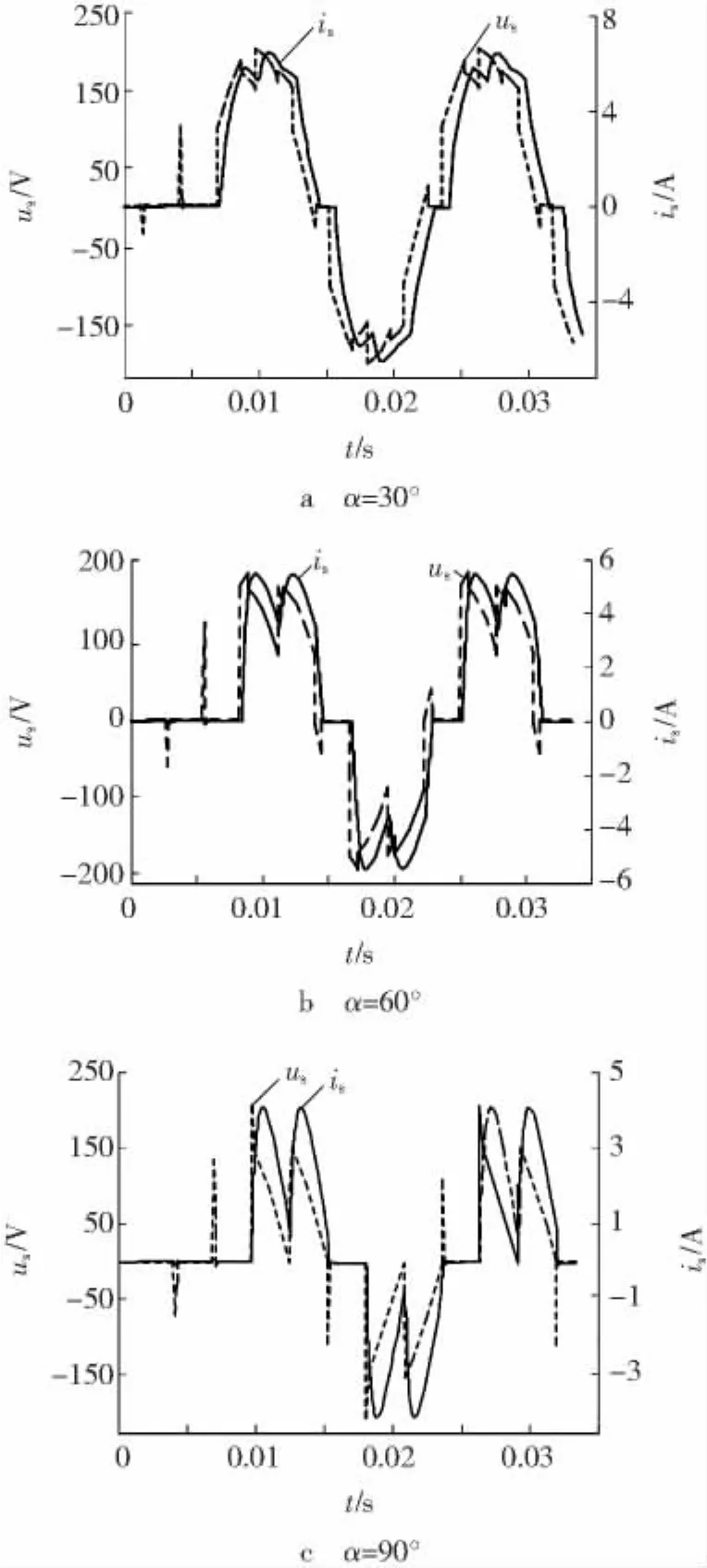
图2 定子电压和电流仿真曲线Fig.2 Simulation curves of stator voltage and stator current
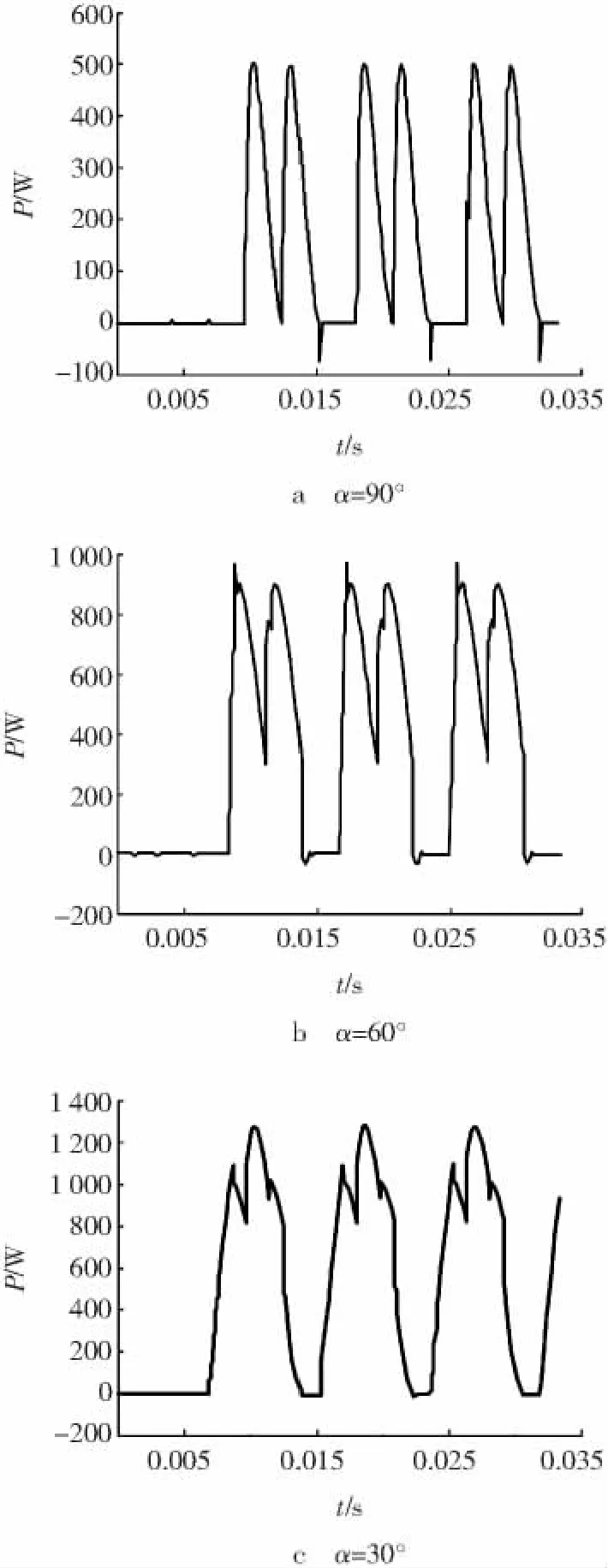
图3 电机有用功仿真曲线Fig.3 Simulation curves of asynchronous machine’s real power
4 结束语
基于瞬时功率理论讨论了异步电机软启动过程中能量分布变化的特点,根据电机的动态数学模型,建立了反映有功和无功功率分布的功率因数函数,将其作为待优化函数,采用梯度下降法进行优化计算并基于优化结果设计了新的软启动控制律。定子电压和电流仿真曲线表明,在启动的初始阶段电机从电网吸收的电能主要用于建立旋转磁场,而启动结束阶段电能主要用于产生有用功。功率仿真曲线进一步验证了控制方法的有效性。
[1]ANDERSEN H R,PEDERSEN J K.Low cost energy optimized control strategy for a variable speed three-phase induction motor[J].27thAnnual IEEE Conference on Power Electronics Specialists,1996,1:920-924.
[2]张承惠,李爱文,张庆范.感应电机新型最小损耗控制策略[J].电工技术学报,1998,13(4):25-29.
[3]CADIRCI I,ERMIS M,NALCACL E,et al.A solid state direct on line starter for medium voltage induction motors with minimized current and torque pulsations[J].IEEE Transactions on Energy Conversation,1999,14(3):402-412.
[4]PENG F Z,TOLBERT L M.Compensation of non-active current in power systems-definition from compensation standpoint[C]// Power Engineering Society Summer Meeting,2000,IEEE.Seattle,WA,USA:IEEE,2000,2:983-987.
[5]樊 扬,瞿文龙,陆海峰,等.一种考虑负载转矩的异步电机弱磁控制策略[J].清华大学学报:自然科学版,2009,49 (4):473-476.
[6]张 茜,余 乐.瞬时功率理论及其应用研究[J].研究与开发,2011(1):10-13.
[7]SYED M K,RAM B S.Instantaneous power theory based active power filter:a matlab/simulink approach[J].Journal of Theoretical and Applied Information Technology,2008,4(1):536-541.
[8]JALALIFAR M,PAYAM A F,MIRZAEIAN B,et al.Dynamic modeling and simulation of an induction motor with adaptive backstepping design of an input-output feedback linearization controller in series hybrid electric vehicle[C]//Power Electronics,Drives and Energy Systems,2006.PEDES’06.International Conference on.New Delhi:IEEE,2007:1-6.
Control strategies on asynchronous machines’soft start based on instantaneous power theory
PI Zhigang
(Center for Engineering Training&Basic Experimentation,Heilongjiang Institute of Science&Technology,Harbin 150027,China)
Aimed at improving the poor start performance and eliminating harmonics pollution to the grid due to the waveform distortion of stator voltage and stator current often occurring during the course of asynchronous machine start,this paper describes the developement of the mathematical model of power factor,based on instantaneous power theory,using 3-phase asynchronous machines for object and according to dynamic equations and optimization of the function of power factor,proposes new control method grounded on the optimal results and provides simulation curves of stator voltage,stator current and real power.The simulation indicates that on different stages of start,new method is able to improve real power,which validates the control method based on instantaneous power theory.
asynchronous machines;instantaneous power;soft start
TM343
A
1671-0118(2011)04-0301-05
2011-07-05
邳志刚(1980-),男,黑龙江省哈尔滨人,讲师,硕士,研究方向:电力电子与电力传动,E-mail:89996660@163.com。
(编辑王 冬)
猜你喜欢
防爆电机(2021年1期)2021-03-29
防爆电机(2020年5期)2020-12-14
防爆电机(2020年4期)2020-12-14
测控技术(2018年2期)2018-12-09
测控技术(2018年9期)2018-11-25
电子制作(2016年1期)2016-11-07
通信电源技术(2016年5期)2016-03-22
电机与控制应用(2015年10期)2015-03-01
电测与仪表(2014年14期)2014-04-04
电力工程技术(2014年1期)2014-03-20
