
神舟八号飞船交会对接CCD光学成像敏感器
2011-11-25 01:42赵春晖高文文龚德铸郭绍刚
空间控制技术与应用 2011年6期
赵春晖,高文文,刘 鲁,龚德铸,郭绍刚,卢 欣
(北京控制工程研究所,北京100190)
神舟八号飞船交会对接CCD光学成像敏感器
赵春晖,高文文,刘 鲁,龚德铸,郭绍刚,卢 欣
(北京控制工程研究所,北京100190)
介绍了CCD光学成像敏感器的功能和组成,以及低噪声视频电路、高速数据处理平台、抗杂光干扰算法、杂光干扰地面试验验证方法等关键技术,并给出了相关测试结果.实际飞行结果表明,CCD光学成像敏感器相机各项指标满足任务书要求,在最后的对接段最远测量距离达164m,位置测量精度优于2mm,滚动轴姿态测量精度优于0.03°,横轴姿态精度优于0.1°,位置和姿态测量精度超过了世界先进水平.
CCD光学成像敏感器;位置和姿态测量;交会对接;神舟八号飞船
中国已于2011年11月3日完成神舟八号飞船与天宫一号目标飞行器首次自主交会对接任务,并于11月14日再次完成第二次交会对接试验,第二次试验旨在考核CCD光学成像敏感器在阳照区的性能,因此飞船分离、撤离和交会试验大部分过程在阳照区进行,同时考虑到安全性,对接在阴影区完成.在交会对接不同的阶段,采用了不同的测量敏感器完成制导、导航与控制分系统需要的相对导航信息,CCD光学成像敏感器是神舟八号飞船与天宫一号目标飞行器交会对接最后靠拢段的关键测量敏感器[1],其测量精度和工作可靠性直接影响对接过程的成败.两次飞行试验中,光学成像敏感器圆满地完成了规定的各项任务,工作稳定,性能指标优异.本文简要介绍了CCD光学成像敏感器的测量原理、测量方案与实现以及地面和飞行试验验证情况,并给出了相关结论.
1 测量原理
取和识别,给出光点在像平面坐标系中的坐标值,进而通过位置姿态算法解算出目标标志坐标系之间的相对位置和相对姿态.由于目标标志器坐标系与目标飞行器对接面坐标系、相机坐标系与飞船对接面坐标系之间的位置和姿态已知,进而可以获得目标飞行器对接面坐标系与飞船对接面坐标系之间的相对位置和相对姿态.与相机坐标系
图1为CCD光学成像敏感器的测量原理示意图.在目标飞行器上固定安装3个以上的特征光点(T1,T2,T3,…)构成目标标志器,其在目标标志器坐标系中的位置坐标已知[2].在飞船上固定安装一个或多个CCD相机,其将目标标志器各光点成像于CCD靶面(t1,t2,t3,…),进行图象处理完成光点提

图1 测量原理示意图
上述测量原理的数学表示如下.

式中,C=C [θ,φ,ψ]为目标标志器坐标系与相机坐标系间的相对姿态旋转矩阵,θ,φ,ψ为相应的俯仰、为目标标志器坐标系与相机坐标系间的相对位置.

由式(1)和式(2)可以得到以下测量方程:

式(3)是一个高阶非线性方程组,通过迭代算法可以求解出目标标志器坐标系与相机坐标系间的相对位置和姿态.
2 测量方案实现
2.1 CCD光学成像敏感器组成和功能
为了精确测量目标飞行器与飞船间相对位置和姿态,必须在目标飞行器一侧安装合作目标标志器,飞船一侧安装相机,前者用来为相机提供高精度测量基准,后者用来对合作目标成像测量.目前国内外存在两种交会对接光学成像敏感器总体测量模式.
1)被动目标标志器测量模式:目标标志器各标志由角反射器组成,由相机一侧的光源对其进行照明,角反射器把照明光沿原路反射,进入相机视场成像,完成测量任务;
2)主动目标标志器测量模式:目标标志器各标志灯自主发光,相机对其直接进行成像测量.
第一种模式为国外交会对接光学成像敏感器所采用[3-5],其优点是相机可自主控制光源发光,便于采取更多的杂光抑制措施,另外目标标志器由光学组件组成,不需要供电,适于长时间在轨工作;第二种为神舟八号飞船交会对接用光学成像敏感器首创,其优点是主动目标标志器像斑均匀、稳定,因而测量精度高、目标识别可靠性高.
CCD光学成像敏感器分为远场和近场两个测量区域,远近场存在重叠备份;为保证可靠测量,远场、近场各采用两台相机,两台相机结构完全相同,互为热备份;远场、近场各采用一个目标标志器,为相机提供测量基准.远场和近场目标标志器均由若干个标志灯组成,各标志灯按设计好的立体布局组合在一起,如图2所示.

图2 神舟八号飞船CCD光学成像敏感器
CCD相机对目标标志器区域成像,对图像进行光点提取和识别,根据目标标志器已知安装信息,按给定算法计算并输出CCD相机坐标系相对于目标标志器坐标系的相对位置和相对姿态角.
2.2 测量误差建模与指标分解
影响测量精度的因素主要包括:1)目标位置误差;
2)相机像点能量中心坐标计算误差;
3)相机内参数标定误差.
通过建模仿真,综合以上各误差源对测量精度影响的仿真结果如图3所示.根据仿真结果进行了的误差分配,可用来指导生产过程的调试、测试,最终保证了测量精度满足指标要求.

图3 光学成像敏感器各误差源对位置和姿态精度影响仿真
2.3 相机设计
2.3.1 工作波长选择
根据 CCD的器件特性可知,其在600nm~950nm谱段内的光谱响应较高.在600nm~950nm谱段范围内的太阳光谱辐照度的值如表1所示.而在CCD光谱响应较好的谱段内,波长越长,太阳辐照度越低,从尽量选择太阳照度低的谱段以降低阳光干扰、标志灯发光器件的可获得性、避开船上其他光电设备的工作谱段等角度考虑,最终确定940nm作为工作波长.

表1 600nm~950nm谱段太阳光谱辐照度
2.3.2 光学系统
主要考虑工作在有限远距离(150~2m),测量精度对畸变等的指标要求,空间环境下工作的可靠性等因素进行光学系统设计,主要设计结果如下:
1)定焦镜头,像方远心光路;2)视场:30.4°;3)焦距:26 mm;4)相对孔径:1/7.
2.3.3 电路设计
(1)视频处理与采集电路
视频处理电路必须满足低噪声、高速像素读出要求.为此选择 Atmel公司的 TH7888A CCD,其像素分辨率1024×1024,为了缩短像素读出时间,采用双路输出模式工作,通过专门地低噪声视频处理与采集电路设计,有效地抑制了CCD噪声,提高了输出信噪比.为实现小型化、低功耗设计,用一片反熔丝FPGA(A14100)产生CCD所需要的复杂控制时序,电路原理框图如图4所示.

图4 CCD视频处理与采集电路原理框图
(2)图像处理电路
图像数据处理电路完成图像预处理、目标提取与识别、位置姿态计算等功能.交会对接任务对数据更新率和测量响应时间(从拍图到输出测量结果)提出了严格的要求,要求图像处理电路具有百万像素级的高速存储与处理能力.为此选用乒乓存储硬件冗余体系结构,实现头部存储图像和DSP图像处理和计算的并行处理,以保证快速测量响应时间和数据更新率要求.
数据处理器选用TI公司的SMJ320C31 DSP,其最高频率为50MHz,能满足运算能力的需求,同时选用一片与视频处理电路同型号的FPGA协助DSP来完成以上功能.数据处理电路原理框图如图5所示.

图5 数据处理电路原理框图
2.3.4 测量算法
由于CCD双路输出导致的两路图像不一致、从150~2m大范围内进行高精度测量的要求以及目标飞行器对接机构、包敷材料、各种设备反光造成的图像背景严重不均匀等因素的影响,使得数据处理算法面临很多技术瓶颈.
(1)双路目标图像整合技术
由于视频处理电路采用了双路视频处理技术来提高速度,导致两路图像背景不一致,图像接合处出现背景急剧变化的细缝,会导致背景较低的一路图像目标像点无法提取,或目标像点骑缝时提取不稳定,最终导致算法不稳定、精度下降.为此提出了双路图像分别处理、在接合处进行整合的处理方法,有效地解决了两路图像背景不一致带来的提取不稳定问题.
(2)抗杂光干扰图像预处理与目标识别算法
在轨时由于目标飞行器表面反射太阳光的影响,从最远到最近测量距离范围内,图像亮暗变化复杂多样,常用的阈值算法无法实现目标和背景图像的最佳分割.研制过程中基于人眼视觉原理,提出了一种自适应阈值确定方法,该方法能自适应地确定图像阈值,实现目标和背景图像的最佳分割.
由于在整个有限远的范围内图像亮暗变化复杂,即使采用了自适应阈值确定算法对图像进行有效地分割,常用的目标识别算法仍无法实现有效地目标识别.为此提出了一种基于显著性特征的目标识别算法,实现了可靠地目标识别.
开发的图像预处理与目标识别算法具有较强的抗杂光干扰能力,在复杂光学环境下能够正常工作,满足了交会对接不同工作时段测量任务的要求.
(3)高精度相机标定与误差修正算法
交会对接任务要求CCD光学成像敏感器的位置测量精度优于3mm、姿态测量精度优于0.03°,由于位置和姿态互为耦合,从2m近距离到150m较远距离范围内同时满足位置和姿态测量精度是一个难点,仅靠常用的光学敏感器误差校正已无法满足要求.研制过程中基于硬件运算能力的约束,提出了一种新型相机标定方法,有效地把位置和姿态测量误差解耦,保证了测量精度指标实现.
2.4 目标标志灯指标确定
(1)目标灯形状及尺寸
从便于像点提取、易于识别及质心计算考虑,标志灯外形选为圆形,同时考虑到目标灯的工程可实现性,最终确定远、近场目标灯直径分别为75mm、35mm.
(2)目标灯发光功率的确定
目标灯发光功率是决定CCD光学成像敏感器的作用距离的关键指标之一.为了确定目标标志灯功率,提出了阈值法和饱和法两种确定目标灯最佳发光功率的数学模型,前者是计算当进入相机光能量最小或像斑最弱时(即目标灯位于最远距离,且位于视场边缘),求使 CCD输出超出像点提取阈值时的目标灯光功率;后者是计算进入相机光能量最大时(目标灯距相机最近,且位于视场中央),求使CCD接近饱和时的目标灯功率.对于远场灯,适于采用阈值法确定其最佳辐射功率.对近场灯,采用饱和法确定其最佳辐射功率.最终确定的近场灯光功率35mW,±24°内远场灯光功率为 300mW ~340mW,图6为近场和远场时CCD输出随距离变化曲线.

图6 近场和远场CCD输出随距离变化曲线
3 地面和飞行试验
3.1 静态精度验证
为保证在150~2m范围内精度验证的覆盖性,提出了基于相机视场同心圆的测例选择方法,如图7所示,在Z向每一测量位置上的某一视场同心圆上,从X轴正向开始逆时针以360°等分间隔(如每隔22.5°)选取测试点,在每一个视场同心圆上均按此方法确定测试点,控制九自由度转台,使目标标志器依次在每一个测试点保持静止,进行精度测试验证.
限于篇幅,仅给出3m时环境试验前后近场相机的精度测试结果,如图8所示.图中横轴为测例编号,纵轴为测量误差.可以看出,环境试验前后数据一致性较好.
3.2 动态精度验证
动态精度验证在九自由度运动模拟器上进行[6],目标标志器安装在三自由度目标转台上,相机安装在六自由度追踪转台上,通过追踪与目标转台间的相对运动模拟实际在轨相对运动,其中九自由度运动模拟器近场动态运动曲线如图9所示.图10为近场相机相对九自由度运动模拟器的动态追迹曲线,位置和姿态追迹曲线图直观地显示相机测量结果随仿真机输出结果(即相机理论测量结果)的变化趋势.

图7 CCD光学成像敏感器测例选择示意图

图8 近场3m时的位置姿态精度测量曲线

图9 九自由度运动模拟器相对运动曲线
3.3 抗杂光干扰验证
与星敏感器对恒星自然天体进行姿态测量不同,CCD光学成像敏感器是对合作目标标志器测量,不仅需要验证当太阳光照射相机时遮光罩杂光抑制能力,更要考核当太阳照射目标飞行器时,对目标飞行器表面物体反射杂光的干扰能力.

图10 近场相机相对九自由度运动模拟器的动态追迹曲线
图11为用1个太阳常数的太阳模拟器照射相机遮光罩时所拍图像.遮光罩阳光抑制角设计指标为25°;实际上阳光入射角为17°是产品无法正常工作的临界角;当阳光入射角为18°时产品可能正常工作,但图像背景不均匀;当阳光入射角大于21°时,图像背景均匀地升高,不会影响产品测量.
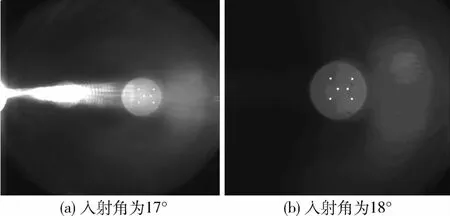
图11 1个太阳常数太阳模拟器照射相机遮光罩时的图像
当阳光照射目标标志器一侧时,由于目标飞行器体积庞大,太阳模拟器口径有限,只能照亮整个目标飞行器实验舱局部区域,此外天地间的太阳光照度有较大的差异,再加上地球、太阳相对运动的限制,只能进行部分试验验证,因此在地面进行太阳照射目标飞行器的试验验证是一个难点.研制过程中通过采取室外太阳照射试验和与光学仿真建模分析相结合的方法进行了试验验证,并根据分析和试验结果给出了实际在轨使用条件建议供飞船总体决策.
3.4 环境试验
CCD光学成像敏感器已通过力学、热真空、热循环、EMC等环境试验,试验过程中产品工作正常,试验前后测量精度等性能指标具有较好的一致性.
3.5 飞行试验
中国已于2011年11月3日完成神舟八号飞船与天宫一号目标飞行器首次自主交会对接任务,并于11月14日完成第二次交会对接试验,第二次试验旨在考核CCD光学成像敏感器在阳照区的性能,飞船分离、撤离和交会在阳照区进行,对接在阴影区完成.根据在轨遥测数据分析,敏感器于神舟八号飞船与天宫一号目标飞行器相距170m时成功捕获目标,但由于软件中对最远距离进行了限幅(165m开始计算),未进行计算,从164m直到对接完成一直稳定跟踪目标并向GNC提供位置和姿态测量数据.CCD光学成像敏感器在阳照区能够稳定跟踪目标,测量稳定.
4 结 论
神舟八号飞船 CCD光学成像敏感器作为近距离靠拢段关键测量敏感器,在中国首次交会对接任务和第二次交会对接试验中表现完美.神舟八号飞船CCD光学成像敏感器基于任务需求和国内实际条件,创新地提出了基于主动发光目标的测量方案、高精度相机标定、复杂背景弱目标识别算法、杂光抑制技术等,在国内外均属于首创.地面和在轨飞行试验结果表明,CCD光学成像敏感器实现了任务要求的功能和性能,测量距离指标与国外同类产品相当,位置和姿态测量精度超过了国际先进水平.方法[J].宇航学报,1994,14(2):24-34
[2] 解永春,张昊,石磊,等.交会对接光学成像敏感器设计中的关键问题 [J].航天控制,2006,24(2):35-44
[3] Howar R T,Bryan T C,Book M L.The video guidance sensor-a flight proven technology[C]The 22ndAnnual American Astronautical Society Guidance and Control Conference, Breckenridge, CO, Feb.3-7, 1999
[4] Masaaki M,Isao K,Hiroshi H,et al.Development of ETS-VIIRVD system-preliminary design and em development phase[R].AIAA-95-3357-CP,1995
[5] Cunha P D, Strandmoe S.Qualification of videometer,an optical rendezvous sensor[C].In 54thInternational Astronautical Congress, Breme, German, Sep.29-Oct.3,2003
[6] 刘慎钊,张新邦.载人飞船交会对接半物理仿真试验环境研究[J].计算机仿真,2005(Z1):208-212
[1] 林来兴,李灿.交会对接最后逼近阶段CCD相机测量
A Vision Guidance Sensor for Shenzhou-8 Spacecraft Autonom ous Rendezvous and Docking
ZHAO Chunhui, GAOWenwen, LIU Lu, GONG Dezhu, GUO Shaogang, LU Xin
(Beijing Institute of Control Engineering, Beijing 100190, China)
The CCD-based vision guidance sensor is a critical equipment at the proximity phase of RVD.The information of the CCD-based vision guidance sensor is introduced in this paper, including princip le,functions and the key techniques of low noise video circuit, high speed data processing circuit, high robust image processing algorithm and ground test.The position measure accuracy of sensor is above 2 mm,and the roll attitude accuracy is less than 0.03°,pitch and yaw accuracy is less than 0.1°.
CCD-based vision guidance sensor;position and attitude measurement;rendezvous and docking;Shenzhou-8 spacecraft

V448.2
A
1674-1579(2011)06-0006-08
DO I:10.3969/j.issn.1674-1579.2011.06.002
2011-09-19
赵春晖(1972—),男,河南人,高级工程师,研究方向为空间视觉导航敏感器设计(e-mail:sunspringzhao@sina.com).
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
导航定位学报(2022年2期)2022-04-11
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
当代水产(2019年1期)2019-05-16
数学大世界(2018年1期)2018-04-12
考试周刊(2018年15期)2018-01-21
中学生数理化·七年级数学人教版(2017年4期)2017-07-08
中学生数理化·中考版(2016年2期)2016-09-10
太空探索(2016年9期)2016-07-12
创业家(2015年1期)2015-02-27
