规则格网模型转换为三角网模型的新方法
2011-11-20 07:40:19李功权
长江大学学报(自科版) 2011年10期
李功权
(长江大学地球科学学院,湖北 荆州 434023)
规则格网模型转换为三角网模型的新方法
李功权
(长江大学地球科学学院,湖北 荆州 434023)
在保留重要点法的基础上,根据GRID与TIN模型的特性,设计了一个新的模板——“方孔钱”模板,此模板考虑了纵、横、对角3个方向上的情况,还兼顾了以节点为圆心,2倍网格步长度为半径的圆作为搜索方向。通过对一个在纵向上分布为3个山脊和2个山谷,且山脊与山谷之间有的坡度陡峭,有的坡度平缓的网格数据模型的测试说明,该算法不但很好地保留了关键网格点(顶点、凹点),最大限度地消除了冗余高程点,消除率达50%以上;而且保证了转换前后模型的精度。
GRID; TIN; 三维可视化; 模板; 数字高程模型
在DEM中,格网模型(GRID)和不规则三角网(TIN)有着各自的优缺点,适用于不同的场合和应用目的[1]。但由于数据的来源格式不一定符合当前的应用和要求,这就有可能需要将GRID模型转换为TIN模型。目前GRID向TIN的转换主要有2种算法:①保留重要点法(VIP, Very Important Point);②启发丢弃法(DH, Drop Heuristic)。VIP方法在保留关键网格点方面(顶点、凹点)最好,但没有很好的考虑在重构TIN模型时边选取的一些规则,没有最大限度的消除冗余点;DH方法在每次丢弃数据点时确保信息丢失最少,但要求计算量大[2]。这2种算法都没有实现效率与精度的最佳融合。易法令等[3]、朱理等[4]分别根据Delaunay三角形的特点和高程点的法向量来作为选点条件,研究了GRID向TIN的转换算法,在消除冗余点方面取得了较好的效果,但精度评价只是和ArcInfo提供的算法进行了对比。下面,笔者以最大限度的消除冗余点、保证转换精度为目标,设计了一种新的模板——“方孔钱”模板,很好的实现了效率与精度的兼容。
1 转换算法
1)转换算法选点一般原则 当空间某一点的高程数据能由已知点的高程数据推导时,该高程数据是冗余的,可删除。为了增加重构三角网时TIN模型的稳定性和规则性,在筛选时遵循了Delaunay三角网重构时的选取方法,也用到了Delaunay三角网的一些特性[5~7]。因此在判断某一点的高程数据为冗余后,还应判断删除该点后在重构TIN模型时还能否满足Delaunay三角网的特性。
2)模板说明 通过对TIN模型的构网方法与Delaunay三角网的特性研究论证出了2类可删除高程数据的情况。具体说明如下:
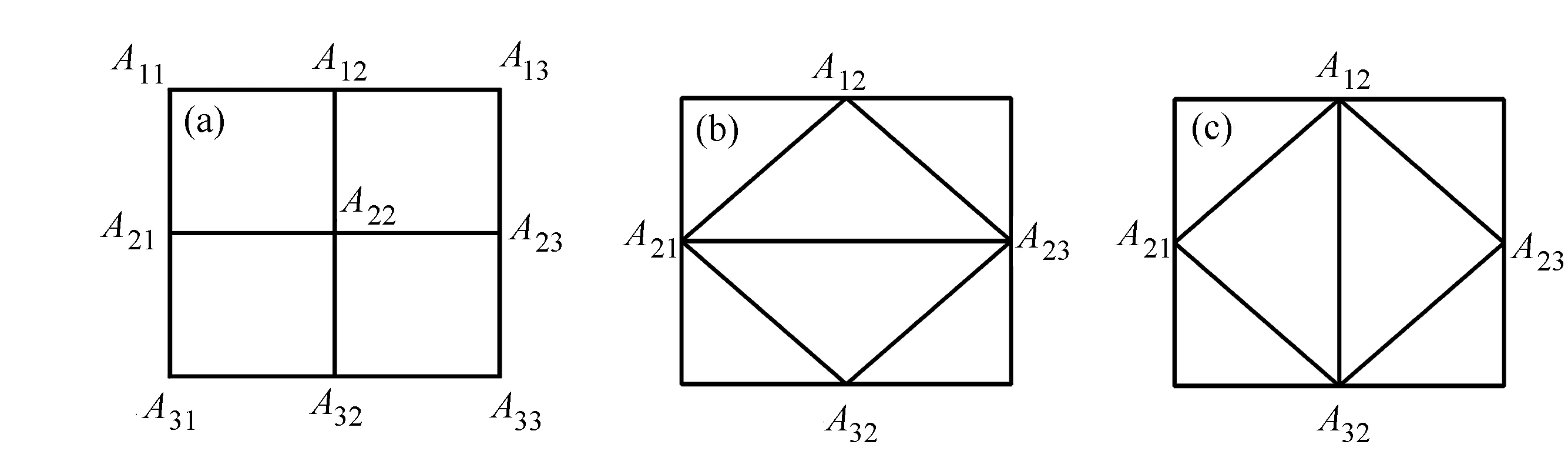
图1 第1类可删除的高程点
①第1类可删除的情况。当A22=(A12+A32)/2;A22=(A21+A23)/2;A22=(A11+A33)/2并且A22=(A13+A31)/2,A22可删除。如图1示,当A22点高程数据被删除后,可构成的TIN模型如图1(b),(c)。根据Delaunay三角网的特性三角形的外接圆内不存在其他点[3~7],图1(b),(c)是满足Delaunay三角网要求的。在图1(b)中A22的高程数据能由A21,A23推导,在图1(c)中A22的高程数据能由A12,A32推导,因此A22的高程数据可删除。要求A22=(A11+A33)/2和A22=(A13+A31)/2是考虑到精度的需求。

图2 第2类可删除的高程点
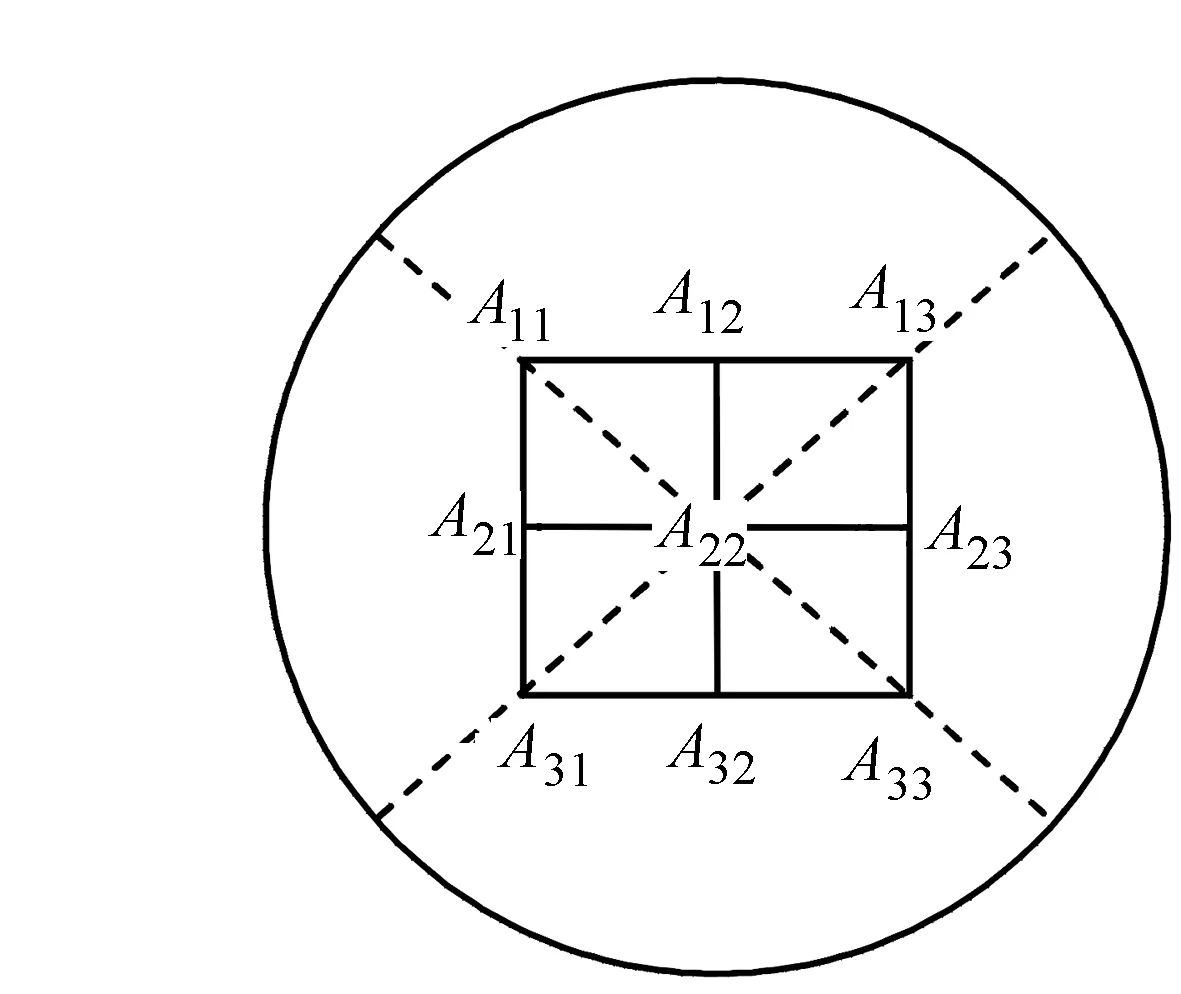
图3 模板形状
②第2类可删除的情况。当A22=(A12+A32)/2并且在模版的圆框内不存在两点过线段A12A32时;或者当A22=(A21+A23)/2并且在模版的圆框内不存在两点过线段A21A23时,A22可删除。如图2所示,高程点5的值能由高程点3、4的值导出。当删除点5的高程数据后,在形成Delaunay三角网时可出现12或34两条线段来实现三角化,如果是12线段来实现三角化则点3在点1、2、4所形成的外接圆内显然是不满足Delaunay三角网的特性的,也就是说在这种条件下删除5号点后在生成TIN模型只会选择34。而高程点5的值能有34导出。即要求12线段的长度超过34线段的长度时5号点才能删除。在模板中即要求圆框内不存在过线段3,4的线段。
根据GRID与TIN模型的特性,依据上述分析,可以归纳为模板形状如图3所示,其中A11…A33是高程数据在GRID中的保存形式,外圆是以线段A21A23的长度为半径,以点A22为圆心绘制。
3)精度保证 为了保证转换过程中模型的精度,在进行第2类情况的判断时,应先判断A22是否为“重要点”,所谓重要点是指在第一类情况中删除了高程点的情况下,那些保留下来的、能推导出已删除点高程数据的点。如果是重要点则即使满足条件也不应删除,不是则可按照上面的判断条件进行高程点的删除。
4)算法的灵活性 该模板不仅实现了效率与精度的最佳融合,并且还可根据不同的要求对删除条件进行调整以达到特定的要求。如精度要求相当高时,可将模板中的外圆去掉。效率要求相当高时,可在高程的比较中采用设置阀值的方法,还可适当的调整模板的外圆大小,以达到最大限度的消除冗余点,提高建TIN模型时的速度。
2 新算法测试及评估
为了检查新算法的效果,特挑选了一个具有典型特征的网格数据(见图4(a)),该数据模型在纵向上分布为3个山脊和2个山谷,且山脊与山谷之间有的坡度陡峭,有的坡度平缓。为了方便对比,在VC6.0下调用OpenGL提供的三维图形软件开发包(glu32.lib、opengl32.lib、glaux.lib);将转换后的数据和Z轴上的属性值按Delaunay三角网规则构建TIN模型,实现了格网模型和TIN模型的三维可视化(图4(b))。这样,不仅有助于分析原始网格模型的典型地形特征,而且还有利于算法之间、模型之间的相互比较和评价。
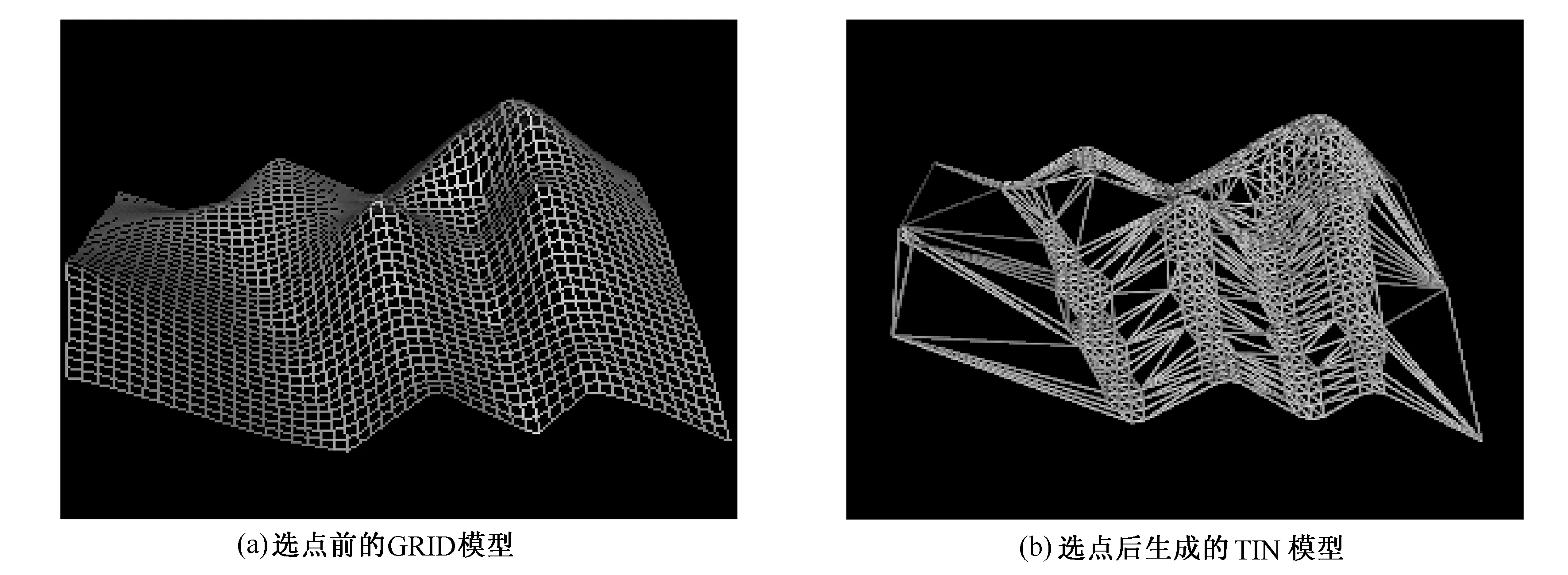
图4 选点前后模型比较
笔者选择了保留重要点法中最经典的3×3模板算法与该算法进行了比较,如表1所示。可以看出,随着GRID模型的网格数目的增加,该算法去掉冗余点的数目越来越多,基本都超过了50%,但3×3模板算法冗余点的消除变化不大。该算法与3×3模板算法对比可以看出,该算法冗余点消除的百分比多达10%以上。在精度比较过程中,选择了表1中的第3组数据进行转换前后的比较(图5),从图5分析得到,该算法不但在保留关键网格点方面(顶点、凹点)相当好,而且在坡度平缓区域中大大消除了冗余点。

表1 新算法与3×3模板比较
3 结 语
随着DEM模型在社会生活中的广泛应用,GRID和TIN模型的相互转化也会得到进一步的深入研究。笔者根据GRID模型和TIN模型的特点,以保留重要点法为基础,提出基于“方孔钱”模板的GRID向TIN的转换算法。通过在三维可视化的环境下的测试表明,该算法不但很好地保留了关键网格点(顶点、凹点),而且最大限度地消除了冗余高程点,冗余高程点的消除率达50%以上,而且保证了转换前后模型的精度。可见,该算法有较高的实用价值。
[1]周启鸣, 刘学军. 数字地形分析[M]. 北京: 科学出版社, 2006:57-62.
[2]JAY Lee. Compparison of existing methods for building triangular irregular netwoek models of terrain from grid digital elevation models[J]. International Journal Geographical Information Systems,1991, 5(3): 267-285.
[3]易法令, 韩德志, 谢云. GRID转换为TIN的选点算法[J]. 计算机工程, 2003,29(11):62-63.
[4]朱理, 胡超. 一种有效的规则网格到不规则三角网的转换算法[J]. 计算技术与自动化, 2006,25(2):67-70.
[5]刘学军, 符锌砂, 赵建三. 三角网数字地面模型快速构建算法研究[J]. 中国公路学报, 2000, 13(2): 31-36.
[6]Tsung-Pao Fang and Les A. Piegl. Delaunay Triangulation Using a Uniform Grid[J]. IEEE Computer Graphics &Applications,1993,13(3):36-47.
[7]Lewis B A, Robinson J S. Triangulation of Planar Regions with Applications [J]. The Computer Journal, 1978, 21(4): 324-332.
[编辑] 洪云飞
10.3969/j.issn.1673-1409.2011.04.022
TP311
A
1673-1409(2011)04-0068-03
猜你喜欢
小学生学习指导(高年级)(2021年5期)2021-05-18 07:34:42
空间科学学报(2020年6期)2020-07-21 05:36:46
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:42
小学生学习指导(低年级)(2019年4期)2019-04-22 03:28:40
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:38
智能计算机与应用(2017年2期)2017-05-04 00:45:34
江西理工大学学报(2015年3期)2015-12-22 05:26:18
长江工程职业技术学院学报(2014年4期)2014-11-30 02:41:40
测绘科学与工程(2014年4期)2014-02-27 07:06:03
测绘通报(2013年2期)2013-12-11 07:27:50