基于T-S型模糊神经网络的机械手控制方案设计研究
2011-11-20 07:43:03刘世聪
长江大学学报(自科版) 2011年10期
孙 超,刘世聪
(东北石油大学电气信息工程学院,黑龙江 大庆 163318)
李 勇,周 庆,殷美艳
(大庆油田有限责任公司第三采油厂, 黑龙江 大庆 163113)
基于T-S型模糊神经网络的机械手控制方案设计研究
孙 超,刘世聪
(东北石油大学电气信息工程学院,黑龙江 大庆 163318)
李 勇,周 庆,殷美艳
(大庆油田有限责任公司第三采油厂, 黑龙江 大庆 163113)
机械手轨迹跟踪控制问题在机器人研究领域占有举足轻重的地位,现在已有很多控制方法,但是控制效果都不够理想。设计了基于T-S型模糊神经网络的机械手轨迹跟踪控制方案,用改进自适应遗传算法与BP算法相结合的混合学习算法来优化网络的权值。仿真试验表明,该控制方案能很好地控制机械手的轨迹跟踪,因而是可行且有效的。
机械手;T-S型模糊神经网络;BP算法;遗传算法
机械手是一个多输入多输出、强耦合、高度时变和非线性的系统,已经被广泛应用于各种智能控制的工业生产中,其中机械手轨迹跟踪是研究热点,近年来研究者已经提出许多机械手轨迹跟踪控制方法,如传统PID控制、计算力矩控制、鲁棒控制[1]、变结构控制[2]、自适应控制、模糊控制和神经网络等,但上述方法的控制效果都不够理想。鉴于此,笔者对模糊神经网络在2关节机械手控制中的应用进行了研究,给出一种基于T-S型模糊神经网络的机械手轨迹跟踪控制方案,用自适应遗传算法(简称GA算法)与BP算法相结合的混合学习算法来优化网络的权值,最后对机械手进行仿真。
1 机械手动力学模型及控制方案
1.1动力学模型
机械手的动力学方程[3]如下:

(1)

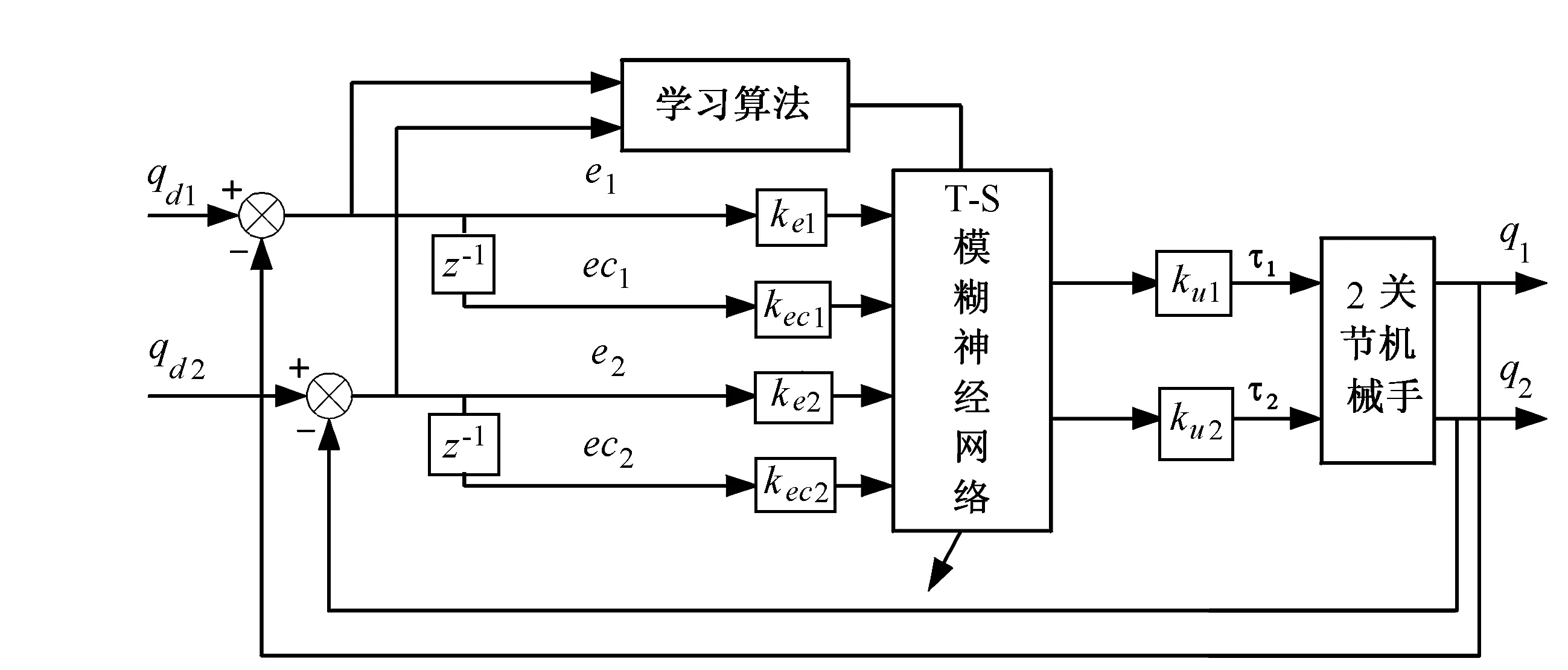
图1 T-S模糊神经网络控制系统结构
1.2T-S型模糊神经网络控制方案
针对2关节机械手的数学模型,采用T-S模糊神经网络控制系统结构如图1所示。图中qd1和qd2是2关节的期望位置;q1和q2是2关节的实际位置;e1、e2分别是2关节的误差;ec1、ec2分别是相应的误差变化率;ke1、ke2、kec1和kec2分别是误差及误差变化率的量化因子;ku1、ku2分别为神经网络输出的比例因子;
τ1、τ2分别是作用于关节1、关节2的转矩。
2 T-S型模糊神经网络结构和学习算法
2.1T-S型模糊神经网络结构
T-S模糊神经网络结构[4]如图2所示。从图2可以看出,该网络由前件网络和后件网络2部分组成,前件网络用来匹配模糊规则的前件,后件网络用来产生模糊规则后件。前件网络与标准模糊神经网络类似。后件网络由2个结构相同的并列子网络组成,每个子网络产生1个输出量。后件网络为1个3层网络,第1层是输入层,将输入量传入第2层,其中第0个节点的输入值x0=1,用来提供模糊规则后件中的常数项。第2层是计算每条规则的后件,该层具有m个节点,每个节点代表1个规则,即:
yjk=p0jk+p1jke1+p2jkec1+p3jke2+p4jkec2j=1,2,…,mk=1,2
(2)
第3层是计算系统的输出,即:
(3)

2.2T-S型模糊神经网络学习算法

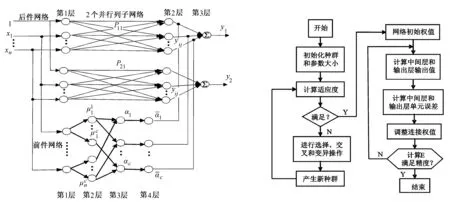
图2 T-S模型的模糊神经网络结构 图3 混合学习算法的训练程序流程图
3 仿真试验

(4)

对机械手轨迹跟踪进行仿真试验。仿真结果分别如图4、5所示。图4和 图5分别给出了关节1和关节2的轨迹跟踪曲线,其中实线为期望跟踪曲线,虚线为采用混合算法的跟踪曲线。从图4和图5可以看出,采用混合算法的跟踪曲线很快跟踪上期望曲线。仿真试验表明,混合学习算法收敛速度快,具有较好的性能,对机械手的控制达到了预期的效果。
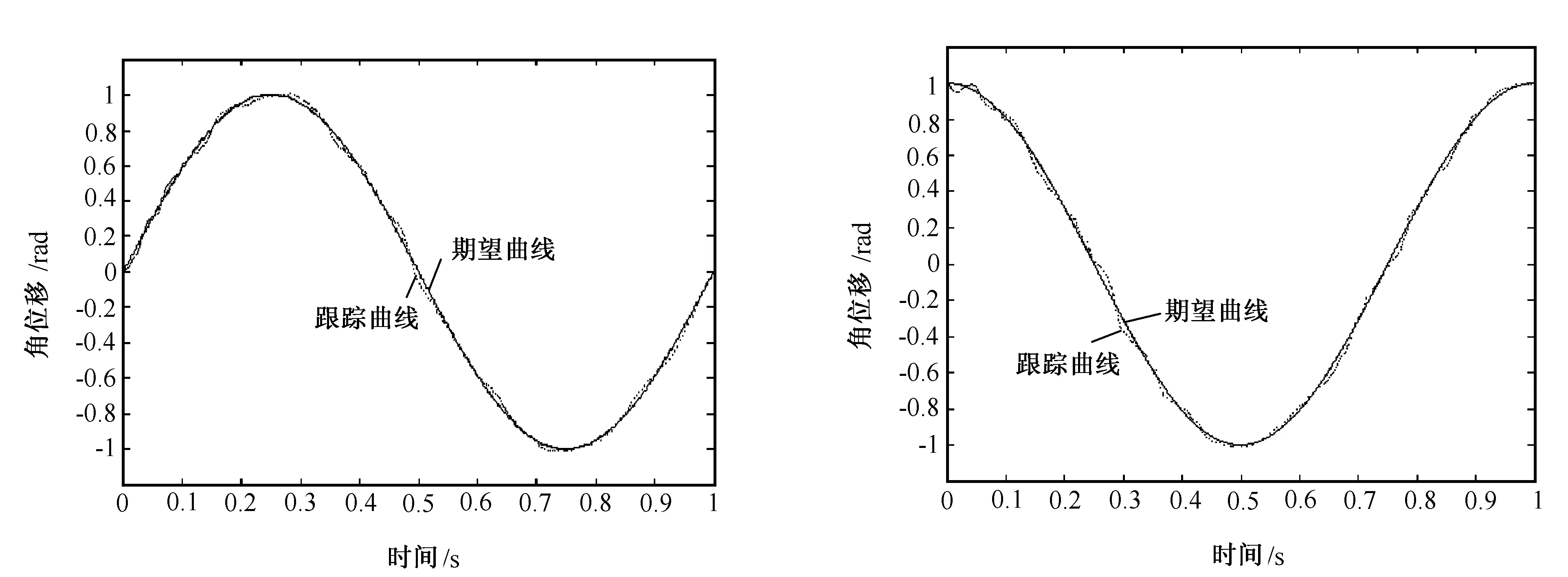
图4 关节1的轨迹跟踪曲线 图5 关节2 的轨迹跟踪曲线
4 结 语
提出了T-S模糊神经网络的机械手轨迹跟踪控制方案,并用改进的混合学习算法对网络权值和阈值进行优化,最后对机械手轨迹进行跟踪控制试验。仿真结果表明,该控制方案能很好地控制机械手的轨迹跟踪,因而是可行且有效的。
[1]朱甦,陈再良.二自由度机械手鲁棒跟踪控制器的一种设计方法[J].机械科学与技术,2006,25(2):189-191.
[2] 叶多芳,葛为民.四自由度机械手的滑模变结构轨迹跟踪控制[J].制造业自动化,2009,31(6):6-8.
[3] 冯川,孙增圻,孙富春.机械手动态T-S神经模糊 控制器设计[J].清华大学学报(自然科学版),1998,45(1):73-76.
[4] 关学忠,刘铁男.模糊控制理论与设计[M].哈尔滨:东北林业大学出版社,2003.
[编辑] 李启栋
10.3969/j.issn.1673-1409.2011.04.029
TP241
A
1673-1409(2011)04-0089-03
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
读友·少年文学(清雅版)(2020年4期)2020-08-24 07:36:26
读友·少年文学(清雅版)(2020年3期)2020-07-24 08:57:04
电子制作(2019年19期)2019-11-23 08:42:00
现代装饰(2018年5期)2018-05-26 09:09:39
中国三峡(2017年2期)2017-06-09 08:15:29
通信电源技术(2016年1期)2016-04-16 04:57:29
重型机械(2016年1期)2016-03-01 03:42:04
大连工业大学学报(2015年4期)2015-12-11 04:06:52
机电信息(2015年3期)2015-02-27 15:54:53