
耳神经-颅底影像导向技术[耳显微外科2007版(二十)]
2011-11-17 05:21王正敏
中国眼耳鼻喉科杂志 2011年1期
王正敏
·教育园地·
耳神经-颅底影像导向技术[耳显微外科2007版(二十)]
王正敏
传统手术是以解剖结构作为手术渐进、深入人体内部的标志,来达到预定目标的,这就不可避免地要扩大术野来确识标志。此外,对缺乏标志和目标周围及其背后重要的又看不到的结构,传统手术是凭借手术者的学识和经验来完成的。术前影像学评估是指导手术的重要信息,手术者通过全部影像资料结合对解剖学的认识,在脑中建立与手术目标相关的三维概念。这个过程对手术入路简单,正常解剖标志变化不大的手术是适宜的。但是,对存在病变而使正常解剖标志变异时,传统手术方法的不足就显而易见了。至于微创手术,其术野更小,手术目标的周边组织更因“一孔之见”而要求手术者有更精密的解剖知识,以求正确定位,在安全边界内清除病变。
影像学导向系统(又称导航系统)技术应运而生。脑立体定位手术和虚拟现实对现代外科医师已是相当熟悉的名词。在耳鼻喉科领域,影像导向系统已用于前颅底手术(如功能性内镜鼻窦外科)和侧颅底手术。
1 影像导向外科简史
在CT发明以前,曾有参考颅内外相关标志,利用气脑造影术来定位颅内外深层结构,并尝试作脑的部分切除来治疗帕金森病。虽然这个方法费时费力,并不实用,但引起了外科医师的广泛注意和兴趣。CT和磁共振成像(magnetic resonance image, MRI)技术发明以后,才有了现代实用脑立体定位手术。这一技术主要特点是利用一种头部支架完成影像空间对手术空间的登记。手术前,通过CT(或MRI)结合连接头架上的定位系统获得数字影像数据。这一头部支架附带笛卡尔坐标系统,在影像检查前,头架戴在患者头上,为定位装置提供数个接触点。数字影像检查把各个接触点的坐标值编为影像坐标值的数据。影像坐标值与坐标系统相关,从而确定相对头架各点的位置,达到导向空间被界定的目的。虽然这种头架系统显得有些笨重,使用不便且费事,但能精确对准颅内的目标,作脑深部定向活组织取出用。这种头架系统经改进,有两种手术计划, (1)简单型:利用头架系统在头部数字影像检查选数个点,所选各点会转换成定位坐标,可作靶向手术(如取活组织、电凝病变等)用;(2)复杂型:结合弹道模拟,为手术者定方向,以安全引导手术入路,最小程度损害路周正常组织。
头架系统必须十分稳固地用螺栓与颅骨接触,会给患者带来不适。所以,使用头架系统作术前影像登记需要全身麻醉。此外,头架系统戴在患者头上有碍麻醉和手术,尤其不适用于颅后窝和其他颅底手术,所以头架式脑定向手术不太受临床欢迎而未广泛应用。
2 影像导向外科技术
2.1 无支架脑立体定位外科技术 无支架脑立体定位外科技术具有头部支架脑立体定位外科系统技术的精确性,而不需要前面提到过的螺栓式支架。无支架脑立体定位外科系统有传感器和计算机两个部分。传感器递送位置信息,计算机将传感器位置信息译成看得见的可确证实时解剖信息的辅助手段。从影像坐标值到脑立体定位坐标是由这两个坐标系统共有的3个或3个以上非线性点(基准点)规定的。基准点含有解剖标志或参考标签。参考标签稳固地连接在头部不变动的部位上。
已有数种数字转换器或传感器技术用在手术空间和相应影像空间的转换上。这类数字转换器分力学连锁系统和非力学连锁系统两类。
2.1.1 力学连锁系统 力学连锁系统以在手术台上装有机械臂而得名。机械臂在其关节装有灵敏的电位计(或角侦计)。从每点旋转光学编码器输出取样,由计算机得出机械臂顶端的位置,给出机械臂坐标(以机械臂基座为基准)。因为机械臂连接在患者头部,而患者头部又作了影像学登记,这样就可将两个坐标系统各共用点计算成地形图的变换。手术时,机械臂尖端(或指示器)的实时定位可与术前影像检查相符合。虽然力学连锁系统较之头架式脑立体定位外科系统来说,可免去影像登记螺栓固定的痛苦,但仍显得笨重,有阻碍手术操作的缺点。现今已很少在耳科和神经外科应用。
2.1.2 非力学连锁系统 非力学连锁系统是利用附加在手术机械上的发射器发生信号的侦知系统工作原理设计的。有主动侦知和被动侦知两种。实际上,这与现代的卫星三角定位相似,非力学连锁系统可作三维空间定位和追踪手术器械之用。按发射器种类分,有超声、电磁和光电三种。
超声数字分析仪利用发射器所发生声音的时程,用3只或更多的接收器进行测量定位。超声数字分析系统的主要优点是发射器和受感器之间无光学障碍。但声速会受温度和湿度影响导致定位偏差,而且在手术室里还会受回声和射频发射的干扰,所以凡属声参考系统的设计不受欢迎。
电磁参考系统也有超声数字分析仪不受障碍影响的优点。这一系统用CT扫描和术中戴的同一只头带作为参考,登记迅速方便。其主要缺点是易受手术室中其他电磁系统和铁磁器械的干扰。另外,影像登记的头带位置和手术登记的头带位置若有轻微不一致,就会降低定位精确性。这种系统应用结果表明,精确性误差不大,比较适用于前颅底内镜鼻窦手术,但不适用于侧颅底手术。
光电数字分析器系统要求发射器和高悬支架上的照相机之间无光线行进障碍。照相机需3只,内含1×4096元件线性充电耦合装置,可确认附加在手术器械上的红外线二极管(LEDs)的三维位置。照相机悬在高于手术野1.5~2.0 m的弧形横架上,以便于追踪手术器械上的LEDs。有多种LEDs设计,通过计算机软件可适配各种手术器械。光电参考系统有主动型和被动型两种。主动型手术器械主动传送红外信号,而被动型手术器械被动反射红外信号。主动型需要在手术器械上附加线路,而被动型则不需要。
新型光电数字分析系统配有激光轮廓化解剖登记新方法。这一新方法使用了LEDs接触激光测距器,并在颅骨解剖差异处上移动激光测距器,就可产生成百个组成轮廓线的点。这一轮廓就可与影像资料中提取到的相应头皮轮廓相配。这一登记方法会大大减少设置时间和登记差错。
光电参考系统无疑是3种发射系统中最理想的一种,尤其适合侧颅底定向。高悬式照相机排列对耳外科和耳神经外科多有不便,因为它们都离不开手术显微镜。手术显微镜体积大小及其布局位置会阻碍红外通信路线,这一点就不及电磁系统。作者设计的侧颅底天线式二极管主动红外线发射系统在相当大的程度上克服了这一障碍(图①~⑤)。
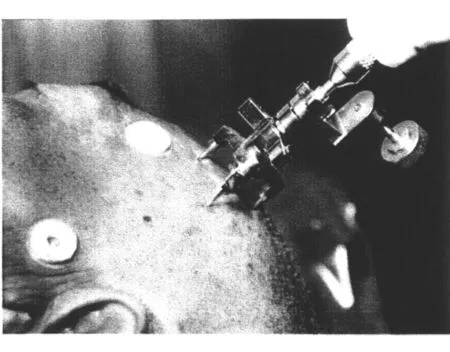
图1 红外发射器钉座刺入头皮浅表
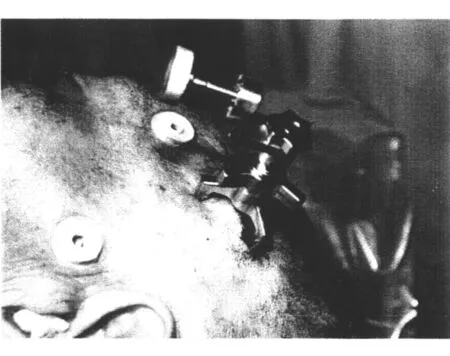
图2 红外发射器钉座刺入头皮深部

图3 用螺旋器将钉座固定在颅骨上
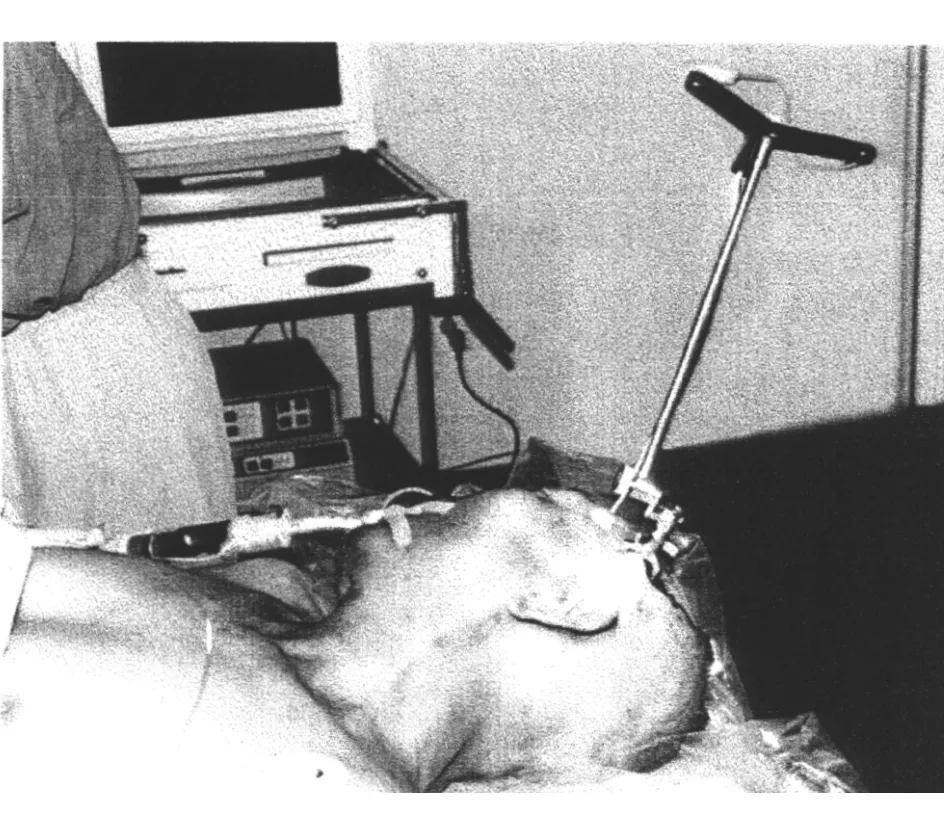
图4 在钉座上安装高杆红外发射“天线”(红外二极管)
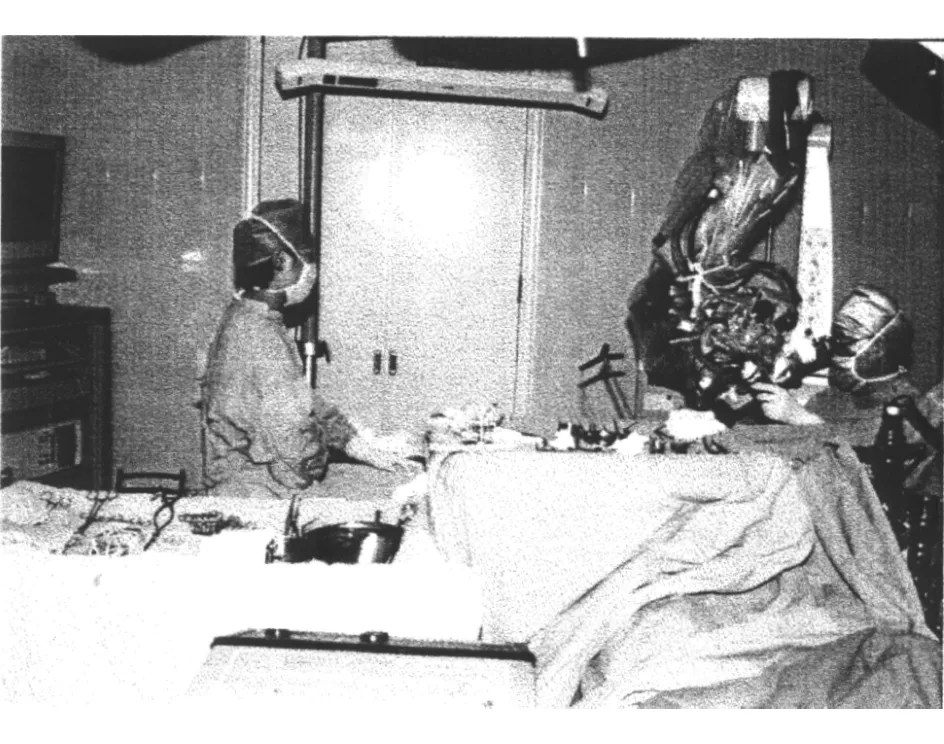
图5 红外照相固定架和红外发射“天线”无“盲区”发射,手术显微镜在“天线”一旁
2.2 容积式脑立体定位外科技术 用计算机重建增强的容积常规程序,可在脑立体定位外科系统中展示和操作,并可在手术显微镜术野焦平面将影像资料展示,还可沿着视线以推进深度展示颅内肿瘤横切面轮廓线,从而指示手术者定位在焦平面水平所示的肿瘤边界,通过手术和电脑控制的激光将肿瘤安全切除(图⑥~⑧)。这种系统提高了手术野和影像资料的相关性,不过,因手术造成软组织移位,此轮廓线会不准确,这是因为影像资料是手术前设定的。
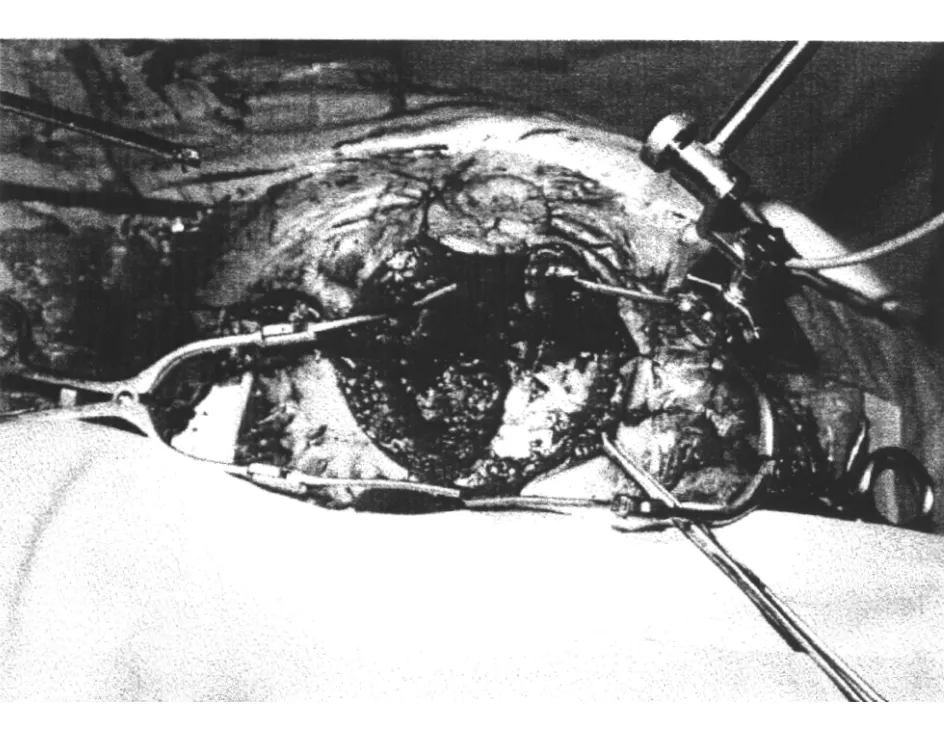
图6 红外发射钉座和侧颅底手术术野的位置关系

图7 红外线发射系统磁共振成像 A.B.分别示不同层面的三维图像。图中十字交叉点为红外发射指示器尖端的位置
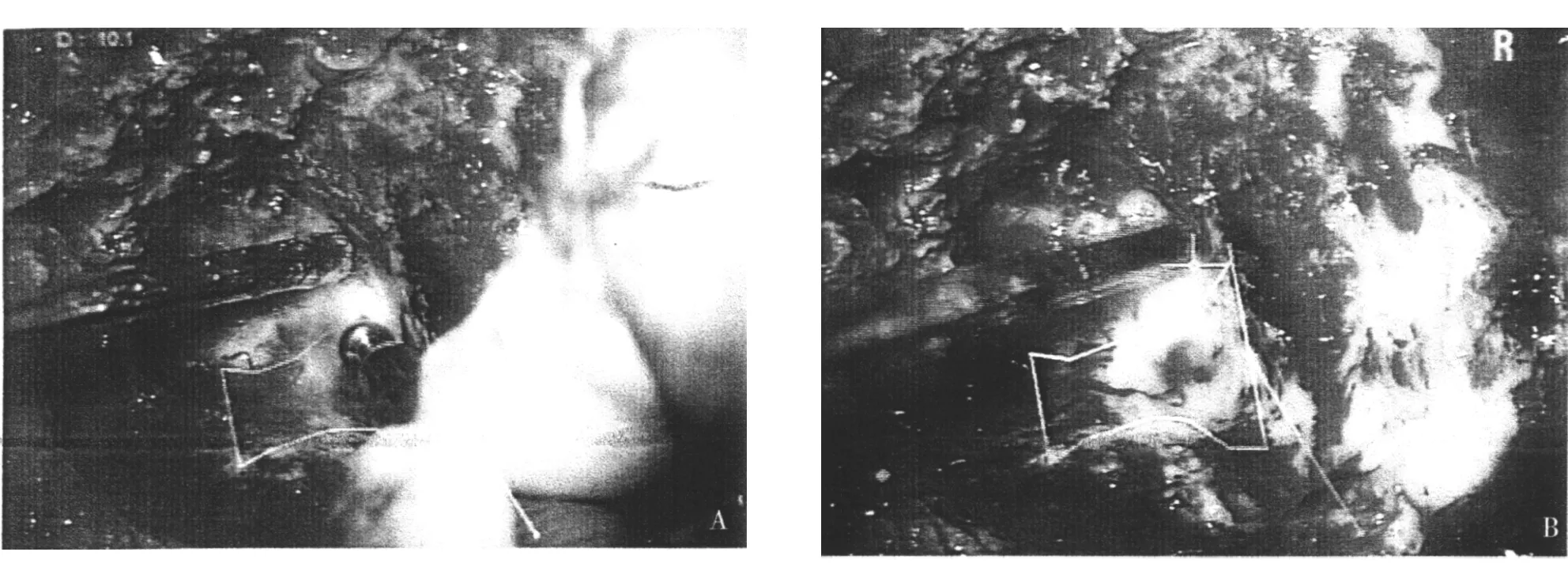
图8 岩骨胆脂瘤虚拟轮廓线条 白色线条提示迷路后胆脂瘤范围,虚拟轮廓线为术者作手术导航。
2.3 实时术中成像技术 所有上述的无支架脑立体定向系统,其计算机规则系统和图示影像展示都是手术前的成像资料。在手术中,软组织可因手术操作、水肿和血肿而移位或变形,原患者解剖三维模式影像登记就无效,失去精确性。这种情况特别容易在切除颅内或颅底下软组织术野中的肿瘤时发生。实时术中成像可解决这一问题,提供即时的真实解剖状况、手术器械的位置而无需无支架脑立体定向手术系统所必需的基准登记。
X线、超声图和CT已被用来显现经皮穿刺活检和血管介入,但容积影像的空间分辨率不足。MRI因有软组织对比佳、容积分辨率良好、多层面和函数演算等优点,又无离子放射,故适合用作实时影像导引疗法。中等术野开放布局和垂直磁体足可满足手术操作。结合无支架脑立体定向系统,MRI系统就可追踪术中解剖改变,还可用监视器展示非铁磁体器械。术中MRI系统最适用于位置深匿肿瘤的手术和能量可控热切除疗法。实时术中成像手术又称为介入性MRI系统,目前还处于研究阶段。对于耳外科和耳神经外科,介入性MRI系统显示骨结构不如CT,其应用前景尚待探索。
3 影像导向系统在耳外科和耳神经外科的应用
影像导向系统在耳外科和耳神经外科的应用还处于探索阶段。实时术中成像技术会将耳科“漏斗式”手术概念变换为“隧道式”导航手术概念。“漏斗式”手术概念是指传统手术方式,进入耳深部时外宽内窄,依靠手术入路沿途的解剖标志到达深部的手术目标。“隧道式”手术概念之意为从一钥匙孔大小的手术入路从成像上虚拟地看到重要的解剖标志而达到手术目标。实时术中成像对耳畸形和硬化乳突认识标志、颅中窝至内听道及岩尖手术的狭小入路定向会很有用,节约手术时间,提高安全性。在“骨盒子”内手术,可使用无支架立体定位系统。所谓“骨盒子”是指像乳突、岩尖等骨结构解剖部位。移动其内部结构仍可保持术前影像登记信息。在脑桥小脑三角区或颞下窝区为脑、肌肉和血管等软组织,所作手术会发生这类结构移动,导航手术系统就应选实时手术成像为宜。
最后必须强调,影像导航系统技术的临床应用要求多学科的合作,尤其是耳外科、耳神经外科临床和影像学检查的互相支持和配合。不论影像导航系统定向有多精密,手术者的手术解剖学知识仍是代替不了的。手术者要结合手术中能发现的标志加以对比,方能做出恰当的判断。
(未完待续)
2010-11-29)
(本文编辑 杨美琴)
复旦大学附属眼耳鼻喉科医院耳鼻喉科 上海 200031
王正敏(Email:entuem@yahoo.com.cn)
猜你喜欢
世界最新医学信息文摘(2021年12期)2021-06-09
世界最新医学信息文摘(2021年12期)2021-06-09
中华肩肘外科电子杂志(2020年1期)2020-08-24
小哥白尼(趣味科学)(2020年3期)2020-07-27
军营文化天地(2018年2期)2018-04-20
小学生时代·大嘴英语(2017年1期)2017-03-20
腹腔镜外科杂志(2016年11期)2016-06-01
腹腔镜外科杂志(2016年10期)2016-06-01
中国当代医药(2015年22期)2015-03-01
中国当代医药(2015年20期)2015-03-01
