舵机对机器人的驱动控制
2011-11-14 07:12刘学菁
天津职业院校联合学报 2011年10期
刘学菁
(天津市第一轻工业学校,天津市 300131)
舵机对机器人的驱动控制
刘学菁
(天津市第一轻工业学校,天津市 300131)
机器人的研究应用领域不断拓宽,其中类人机器人的研究和应用尤其受到了普遍的关注,并成为智能机器人领域中最活跃的研究热点之一。研制与人类外观特征类似,具有人类智能、灵活性,并能够与人交流、不断适应环境的类人机器人一直是人类的梦想之一。本文阐述了采用了PIC系列单片机对机器人各功能子系统进行控制的同时,通过对舵机的优化控制使机器人具有多关节协调运动模仿人类动作的能力。
类人机器人;运动轨迹;驱动控制
类人机器人研究在很多方面已经取得了突破,如关键机械单元、基本行走能力、整体运动、动态视觉等,但是离理想中的要求还相去甚远,需要在类人机器人思维和学习能力、与环境的交互、躯体结构和四肢运动、体系结构等方面进行更进一步的研究。研制与人类外观特征类似,具有人类智能、灵活性,并能够与人交流,不断适应环境的类人机器人一直是人类的梦想之一。
本文通过对舵机的优化控制使机器人具有多关节协调运动模仿人类动作的能力。
一、舵机对机器人的驱动控制
机器人上身的手臂及头部结构是由多舵机组成的。舵机是一种位置伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统。
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
下图选用的舵机(图0)是一种高性能舵机,其力矩是8.7 kg·cm ,速度为0.17 s/60°,型号是KRS-2346ICS。该舵机在同类产品中具有力矩大,稳定性好,且易于控制等突出特点。只要按照要求给定脉冲周期宽度,舵机能从0°转到0°,通过程序控制,使舵机匀速或变速转动。
图0 舵机外观图
舵机与外界的连接端口只有三端,其中与单片机的接口只有一端,称之为控制线,另外两端分别接电源与电源地,为电源线与地线。舵机与单片机接法如下图1所示。舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。一般舵机的控制要求如图2所示。
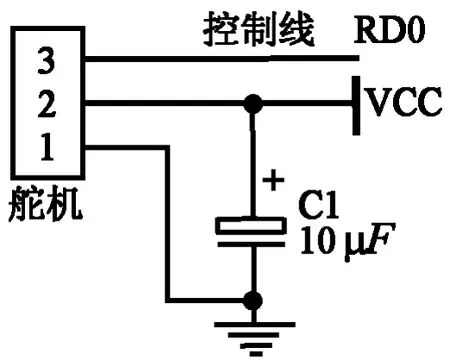
图1 舵机与单片机的接线图
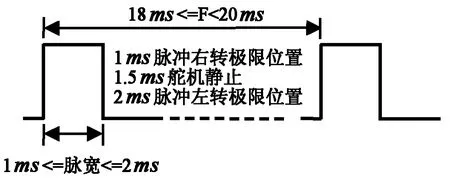
图2 舵机的控制要求
用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度。单片机完成控制算法,再将计算结果转化为PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠。单片机系统实现对舵机输出转角的控制:首先是产生基本的PWM周期信号,即产生20 ms的周期信号;其次是脉宽的调整,即单片机模拟PWM信号的输出,并且调整占空比。即可使舵机转到相应角度。
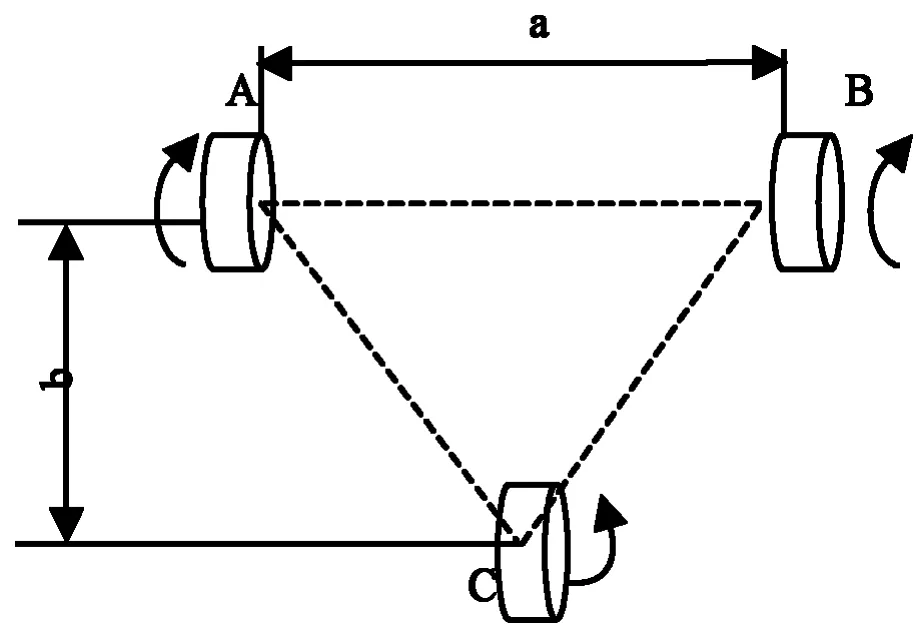
图3 机器人移动轮示意图
机器人手臂运动的轨迹是指机器人在运动过程中的位移、速度和加速度。而轨迹规划是根据作业任务的要求,计算出预期的运动轨迹,对机器人的任务、运动路径和轨迹进行描述,机器人轨迹规划属于机器人底层规划,是在机器人运动学和动力学的基础上,讨论在关节空间和笛卡儿空间中机器人运动的轨迹规划和轨迹生成方法。
在规划机器人的运动轨迹时,还需要弄清在其路径上是否存在障碍物。路径规划和障碍物的组合把机器人的规划与控制方式划分为四类,如下表1所示。本文采用了连续路径的无障碍轨迹规划方法。

表1 机器人手臂控制规划
路径有:离线无碰撞路径规则、在线路径跟踪离线路径规则、在线路径跟踪约束无位置控制、在线障碍探测和避障位置控制。机器人最常用的轨迹规划方法有两种:第一种方法要求对于选定的转变结点(插值点)上的位姿、速度和加速度给出一组显式约束(例如连续性),轨迹规划对结点进行插值,并满足约束条件;第二种方法要求给出运动路径的解析式,如为直角坐标空间中的直线路径,轨迹规划在关节空间或直角坐标空间中确定一条轨迹来逼近预定的路径。在第一种方法中,运动的设定和轨迹规划均在关节空间中进行,因此可能会与障碍物相碰。第二种方法的路径运动是在直角坐标空间中给定的,而关节驱动器是在关节空间中受控的,因此,为了得到与给定路径十分接近的轨迹,首先必须采用某种函数逼近的方法将直角坐标路径约束(路径运动)转化为关节坐标路径约束(路径运动),然后确定满足关节路径约束(路径运动)的参数化路径。目前,机器人的手臂或其它运动方式是示教再现的,即首先教机器人如何做,机器人就记住了这个过程,于是它可以根据需要重复这个动作。对于连续路径控制(图4),不可能把机器人的运动轨迹的所有点都示教一遍,让机器人记住,因为这样会增加计算机(单片机)的负担或浪费内存。因此,对于有规律的轨迹,只要示教几个特征点,(如直线需要示教两点,圆弧需要示教三点),计算机或单片机就能利用插补算法获得中间点的坐标(相对于基坐标系),机器人将这些运算结果放入存储器,以便以后的再现。
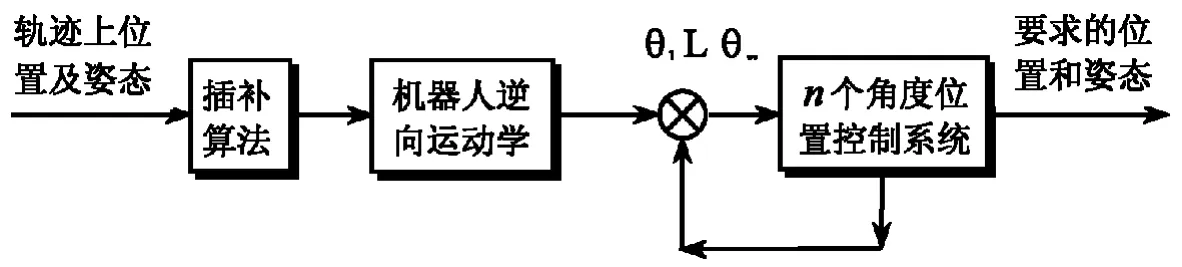
图4 机器人轨迹控制过程图
(二)舵机的软件设计
舵机是小型仿人机器人常用的输出执行机构。它接收一定的控制信号,输出相应的角度。图5所示为舵机的内部结构图,从图中可以看出舵机主要是由外壳、一个小型直流电机、一组减速齿轮、一个用于检测转角位置的检测电位器和一块控制电路板组成。其中,高速转动的直流电动机提供了原始动力,经过减速齿轮组减速后,通过输出轴对外提供转距,齿轮组的减速比越大,舵机的输出力矩也越大。标准的舵机有3条导线,分别是:控制线、电源线、地线。电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源,电压通常介于4~7.2 V,控制线的输入是一个宽度可调的周期性方波脉冲信号。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比,其输出轴转角与输入信号的脉冲宽度之间的关系可用图6所示。
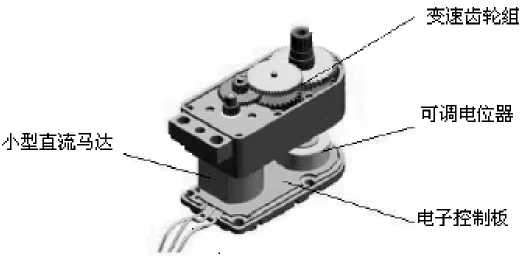
图5 舵机的内部结构图
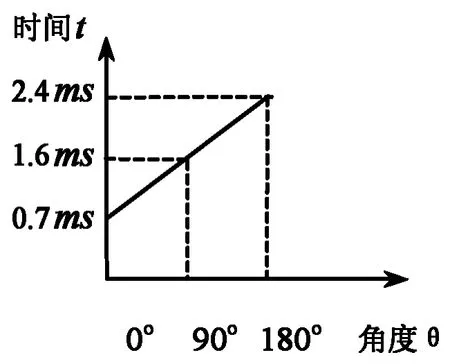
图6 舵机输出转角与输入信号脉冲宽度的关系
舵机标称方波脉冲信号的周期为20 ms,事实上舵机角度控制对信号的周期要求为18~20 ms。舵机的控制信号被成为PPM(Pulse Position Modulation,即脉冲位置调制波)。可由FPGA模拟电路或单片机来产生。
本文采用的PIC16F877为主控芯片,晶振频率取值20 MHz,每条指令执行时间为200 NS。从图7可以看出,舵机角度变化1°时,脉宽改变为1700μs/180°=9.4μs/°,单片机能执行9.4μs//0.2 μs/条约47条指令,用C语言很难实现在47条指令内一次比较判断完24路舵机的PPM信号。多路PPM信号产生的机理如图13所示。为了产生精确的时间信号,占用了一个16位硬件计数器,计数基准设为200 ns,同时用24个16位匹配寄存器保存每一路PPM信号的计数匹配值,该匹配值正比于舵机的期望角度。24路PPM信号分为8组,每组3路进行分时控制。程序开始时,将第一组PPM信号相应的引脚全置高电平,并且将计数器清零。然后不断查询计数器的值是否大于或等于匹配寄存器的值。如果是,将该路PPM信号的引脚置为低电平。每一组PPM信号占用的时隙均为2.4 ms(不足2.4 ms的延时到2.4 ms),保证每一路PPM 信号的周期T =2.4×8=19.2ms。在8组PPM信号处理完毕后,再用0.5 ms~1 ms的时隙进行系统的其他任务处理。这种分时控制的方法的最大特点是保证每一路PPM信号的时间误差最小,且不会产生波形的抖动。对于PIC16F877单片机在20 M的系统时钟下,1 ms内能执行5000条单周期指令,PPM的周期可以大于20 ms。
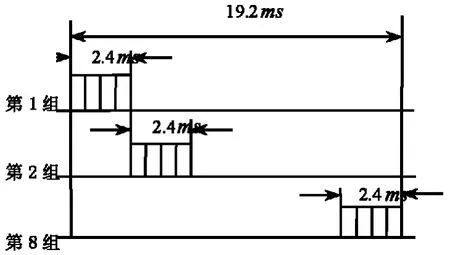
图7 多路PPM信号产生机理
图8 所示为多路PPM信号的发生流程图。PA、PB、PC、PD、PE的24个端口均为PPM输出端口,16位定时器用来和每组的3路PPM信号匹配寄存器进行比较,基准为200。
本文着重研究了用于组成机器人手臂的舵机的控制及各个子功能模块的设计,为机器人的理论实现提供了基础。
[1]殷际英,何广平.关节型机器人[M].北京:化学工业出版社,2003.
[2]蔡自兴,周翔,李梅毅等.基于功能/行为集成的自主式移动机器人进化控制体系结构[J].机器人,2000,(03).
The Drive Control of the Robot from Servo
LIU Xue-jing
(Tianjin First Light Industry School,Tianjin 300131 China)
In the highly developing robot applications field,humanoid robot research are laid more emphasis on.Humanoid robot,with similar human features,intelligence and flexibility,is able to communicate with people and constantly adapt to the environment.This thesis describes the PIC MCU is used to control the subsystem of the robot to develop the multi-joint movement coordination ability through the servo control of the robot,which has been one of mankind's dreams.
humanoid robots;trajectory;drive control
TP24
A
1673-582X(2011)10-0082-05
2011-07-07
刘学菁(1976-),女,天津市人,硕士,天津市第一轻工业学校讲师,主要从事机电专业教学工作。
猜你喜欢
数学物理学报(2022年3期)2022-05-25
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
数学物理学报(2019年5期)2019-11-29
自动化学报(2019年6期)2019-07-23
现代装饰(2018年5期)2018-05-26
电子制作(2018年1期)2018-04-04
中成药(2017年12期)2018-01-19
中国三峡(2017年2期)2017-06-09
制造业自动化(2017年2期)2017-03-20