通用快速仿真平台在机电自控专业中的应用
2011-10-24 05:04:14陈森森宋圣强林疆哈
中国现代教育装备 2011年17期
陈森森 任 明 宋圣强 林疆哈
温州大学机电工程学院 浙江温州 325000
通用快速仿真平台在机电自控专业中的应用
陈森森 任 明 宋圣强 林疆哈
温州大学机电工程学院 浙江温州 325000
机电自控专业的大多数核心课程概念多、理论性强,特别是课程间知识点联系紧密。为了便于学生理解和自学,尤其加深对机电自控专业的整体认识,基于Matlab的GUI图形界面和Simulink的RSIM快速仿真功能,介绍了面向课程群的通用快速仿真平台的设计开发及有关知识点的示例演示。该平台的仿真内容充分考虑了机电自控专业课程之间的关联性,尽可能地体现学科知识点的联系。
通用快速仿真平台;Matlab-GUI;Simulink-RSIM
机电自控专业(以下简称自控专业)的大多数核心课程概念多、理论性强,特别是课程间知识点联系紧密,学生应该具有电工电子、测试及信号处理、自动化控制理论、计算机控制等专业理论知识,还必须有较深厚的数学和代码编程功底。另一方面,随着课程种类的增多,学时却趋于减少。因此,对于理论抽象、实际验证机会少的自控专业课程来说,如何吸引学生的兴趣,达到理论问题当堂理解、当堂验证、当堂记忆是一个重要的教改课题。目前具有图形界面的虚拟实验技术已经成为课程教学的有力工具,在考虑自控专业课程间学期跨度大、知识点联系紧密、容易遗忘等特点的同时,基于Matlab-GUI设计了自控专业课程群的通用仿真平台,并利用Simulink的实时仿真RTW的快速仿真目标功能RSIM提高了平台的性能。实践证明该仿真平台操作便利,各知识点相辅相成、联系紧密,不仅能满足专业理论实时验证的要求,更有助于采用关联教学法加深学生对自控专业的整体认识。
1 快速仿真平台的内容选择
实验平台的内容是以机电自控专业核心课程的实验项目为主,并以工程实例为辅,按照课程间的关联性进行选择确定。平台的层次内容如图1所示。根据图中所列内容可以看出课程间的关联性。例如控制工程基础中的典型二阶系统的瞬态响应是时域分析法的重点。它是利用单位阶跃信号对二阶系统进行激励,通过系统输出的时域指标来分析阻尼系数和固有频率对系统的影响,有助于加深理解实际高阶系统的时域响应特点。另一方面,如果用复杂周期信号、扫频信号代替阶跃信号激励二阶系统,通过频谱分析可以验证线性系统输入输出的频率保持性,并根据二阶系统的频率特性来理解信号各频域段的输出响应特点。如果进一步利用周期方波、三角波作为系统的激励信号,不仅可以了解信号的谐波叠加性而且系统对信号中高次谐波的过滤作用和抗干扰性会有更深入的认识。这一部分知识恰恰是测试及信号处理课程中有关信号合成、傅里叶级数、频谱分析的难点和重点。因此利用Matlab的通用仿真平台,把以上课程间的知识点归纳,并以仿真实例的形式进行联系,将会促进课程间的融会贯通,突破因学期时间安排所引起的局限性。
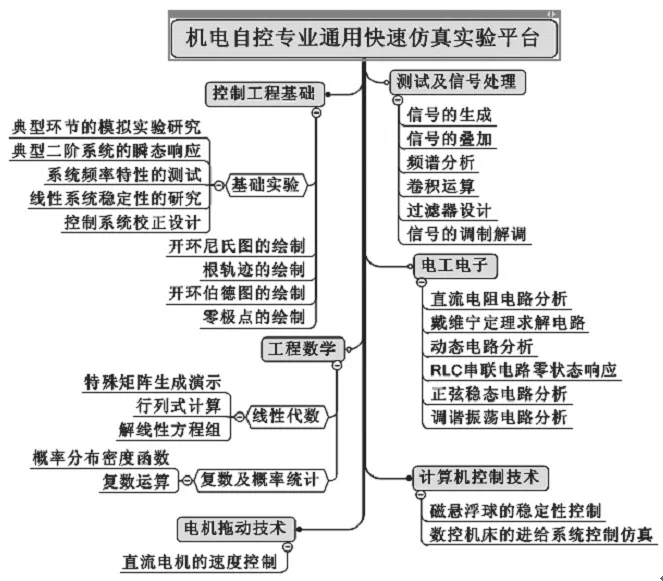
图1 实验平台的基本内容
2 快速仿真目标实现
2.1 快速仿真目标(RSIM)
平台的许多实验内容需要通过不断调整各类参数来观察仿真结果。如果通过Matlab GUI界面中每次输入参数后,再利用Matlab的sim函数调用后台的Simulink模型进行仿真,不仅参数输入麻烦而且仿真等待时间较长,尤其对于工程实例中结构复杂,计算量较大的Simulink模型尤为明显。为此,笔者采用文献[3]所述,利用Simulink的实时仿真RTW提供的快速仿真RSIM功能,把Simulink模型编译为独立的C代码可执行程序来加快仿真速度。同时它支持批量参数调整,并从Matlab的标准Mat文件中下载新的参数值或信号数据而无须对Simulink模型重新编译。以图2所示的二阶系统动态阶跃响应为例,Simulink模型命名为“control_base.mdl”。为了实现图形界面的快速仿真,利用Simulink仿真界面中的RTW参数设置选项,制定系统目标文件和模板联编文件,再单击Build按钮后,RTW将自动生成名为control_base.exe的C程序代码文件。此文件将在GUI平台控件的回调函数中以“!control_base–p filename.mat–tf stoptime”的调用形式代替Simulink模型进行仿真,其中filename.mat是由Matlab函数“rsimgetrtp”所获得的control_base模型的结构参数数据文件,它可以快速替换整个参数向量来研究参数变化对仿真的影响。基于RSIM功能的二阶系统动态阶跃响应的GUI界面设计如图3所示。当快速仿真选项中的ωn固定单选按钮被选中,并设定调整次数和调整步长,点击“运行”按钮后,仿真结果会快速显示出系统随阻尼系数ξ变化的10次阶跃响应结果。
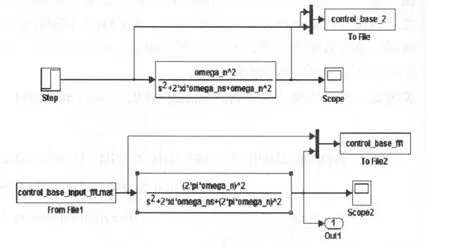
图2 二阶系统激励响应的Simulink模型

图3 基于RSIM的二阶系统的阶跃响应
2.2 快速仿真目标的程序实现
点击图3“运行”按钮,其控件的回调函数将读取GUI界面设定的各项参数值,通过调入转化成独立C代码后的二阶系统,实现阶跃响应的快速仿真。主要程序如下:


3 关联性仿真实验设计示例
通用快速仿真平台的内容不是相互孤立的,在每个GUI仿真项目中既可以通过点击“知识点超链接”的设置菜单项将各课程间的相关内容链接起来,也可以设计专门的仿真实验来体现课程间的关联性,实现各实验内容上相辅相成的效果。图3正是在基于上节的快速仿真目标实现和第二节课程关联性讨论基础之上,以测试技术及信号处理中有关信号合成、频谱分析等难点内容与自动控制理论的系统频率特性的知识点结合为例而考虑设计的GUI仿真流程图。
图4是为了实现图3仿真功能所设计的GUI界面。界面中除了设置3个正弦波以实现波形的自由叠加,还设置了“特殊信号选项”,包括了扫频信号、周期方波、三角波在内的复杂信号以验证二阶系统的频率特性。当特殊信号选中后,正弦波选项的所有参数设定将自动屏蔽为零,防止输入信号间的相互干扰。图中所示结果是利用扫频信号作为系统激励,其中Fig.A是时域图,它是幅值保持不变,频率呈线性增加的信号。Fig.B中的频谱图显示了信号在0~50Hz的上、下限进行扫频,与所设定的初频和终频的参数值一致(如图5所示)。另外,二阶系统的参数可以任意设置,这里为了采用与前节相同的系统,阻尼系数和固有频率分别设定为0.1和10Hz,其系统的伯德图由Fig.C所示,由理论可知,此时扫频信号中10Hz的成分将会引起系统的谐振,使其附近的输出振幅远远大于扫频信号,并且在趋向高频时,振幅逐渐衰减至零。Fig.D的输出时域图验证了1秒附近输出达到了最大振幅,此时所对应的频率成分恰为10Hz,同时其频域图Fig.E验证了输出信号中20Hz以后的成分已经基本消失。另一方面,在教学中发现学生对信号的傅里叶级数及其频谱分析较难理解,为此也设置了方波、锯齿波、半波等作为激励输入,它们均可由傅里叶级数所表达的基频整数倍的无数个正弦波所构成。图6展示了复杂周期信号的傅里叶级数展开及其频谱。图6(b)是基频为2Hz,谐波数设定为4的方波的傅里叶级数展开。通过谐波数的设定可以形象地验证正弦波是如何随着谐波数的增加变化到方波。图6(c)验证了周期信号频谱具有谐波性、衰减性、离散型的特点。

图4 信号激励响应设计流程图

图5 系统扫频分析

图6 方波的傅里叶级数展开
图7是方波作为系统激励信号,并且设定系统的衰减系数和固有频率为0.5Hz和30Hz时的系统动态响应结果。通过图中Fig.B与Fig.E比较可知方波激励系统后,由于此时的系统频率特性,50Hz以后的谐波成分已经被过滤掉,同时可以验证除了基频的振幅最大外,在频率为30Hz附近因谐振的缘故幅值谱增大。Fig.D中的输出响应的波形不再保持方波而是基频为2Hz的复杂周期信号。

图7 方波的系统激励分析
4 结束语
在考虑了机电自控专业课程间交叉关联性的基础上,利用Matlab的GUI和快速仿真目标RSIM功能,设计了面向课程群的通用快速仿真实验平台,它具有专业内容涉及面广,课程间知识点联系紧密,扩充性好、运行速度快的优点,对课堂教学起到了有效的辅助作用,同时促进了学生对课程间关系的了解,有利于加深对自控专业的整体认识。
[1] 李京秀.基于Matlab图形用户界面GUI的电路仿真实验的制作[J].电气电子教学学报,2004,26(4):99~101
[2] 陈瑞峰,左曙光,郭伟.基于Matlab GUI的信号分析系统[J].佳木斯大学学报,2009,27(5):645~647
[3] 杨涤,李立涛,杨旭,等.系统实时仿真开发环境与应用[M].北京:清华大学出版社,2002
Application of versatile rapid simulation platform for electromechanical automation
Chen Sensen, Ren Ming, Song Shengqiang, Lin Jiangha
Wenzhou university, Wenzhou, 325000, China
Most core courses of electromechanical automation have the characteristics of more concepts, stronger theory and especially close correlation between the knowledge points. In order to help students comprehend and self-learning, in particular, improve the overall understanding of electromechanical automation, a versatile rapid simulation platform design for course group and relevant demonstration samples are introduced based on Matlab-GUI and Simulink-Rsim. The correlation between courses of electromechanical automation is fully considered in the simulation contents of the platform.
versatile rapid simulation platform; Matlab-GUI; Simulink-RSIM
2011-02-28 稿件编号:1102093
陈森森,在读本科生。通讯作者:任明,博士,讲师。
浙江省大学生科研创新团队(新苗计划)资助项目(编号:2009R424034);温州大学校教改资助项目(编号:10jg50B);温州市科技计划资助项目(编号:G20100053)。
猜你喜欢
化工管理(2022年14期)2022-12-02 11:47:16
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
学生天地(2020年8期)2020-08-25 09:11:34
天津教育·下(2018年9期)2018-07-13 08:25:47
电镀与环保(2016年3期)2017-01-20 08:15:29
深圳大学学报(理工版)(2015年5期)2015-02-28 16:21:22
发明与创新(2015年30期)2015-02-27 10:39:52
实验技术与管理(2014年9期)2014-03-11 18:37:38
电力自动化设备(2013年11期)2013-09-18 02:55:14
电气电子教学学报(2012年1期)2012-10-12 03:27:48