应用于皮卫星的地球磁场测量系统设计*
2011-10-19 12:47:32朱小丰金仲和
传感技术学报 2011年8期
蔡 波,王 昊,朱小丰,韩 柯,金仲和
(浙江大学信息与电子工程学系,杭州 310027)
地球磁场通常是低轨微小卫星姿态确定系统中重要的参考依据之一。三轴磁强计体积小、重量轻、功耗低,具有较高的测量准确度,是微小卫星定姿的理想传感器件[1]。实际应用中一般沿星体坐标系三轴方向安装磁强计,测量空间中该位置的磁场矢量。卫星的姿态确定系统利用磁强计采集到的磁场矢量,结合地球磁场模型就可以确定卫星在地球磁场中的位置,实现卫星的姿态角度解算[2]。
由于宇宙空间的辐射环境存在着多种粒子与宇宙射线,辐射会给器件带来损伤,普通商用磁强计无法满足皮卫星长寿命工作的要求。针对商用磁强计的不足,在设计地球磁场测量系统可以采用两份磁强计作冗余备份的方法,来提高地球磁场测量系统的空间抗辐照能力。
与此同时,皮卫星的运行状态对磁强计的工作影响很大。在皮卫星由于姿态控制系统的故障出现大角度翻滚的条件下,普通商用磁强计无法保证高准确度的实时数据输出,因此有必要对所设计的磁强计进行动态响应试验,测试其输出稳定性。
浙江大学微小卫星中心早期研制的地球磁场测量系统集成化程度低,功耗较大,受外界电磁干扰影响严重,测量误差大。在大角度翻滚的情况下,无法保证准确、稳定的实时数据输出,可靠性较低。
针对这些不足,本文根据皮卫星体积小、功耗低、工作环境复杂的特点,设计了一种应用于皮卫星的地球磁场测量系统。该地球磁场测量系统中自行设计的磁强计体积小(60 mm×30 mm×5 mm)、重量轻(25 g)、功耗低(150 mW)、准确度高(1σ测量误差为10-8Tesla),可以改善普通商用磁强计的抗辐照能力,能够在10°/s的角速度旋转的条件下工作正常,满足皮卫星的要求。
1 磁强计设计
本文设计的磁强计实物如图1所示。磁强计设计框图如图2所示。

图1 磁强计实物图

图2 磁强计设计框图
该结构主要由磁阻传感器HMC1001和HMC1002、差分信号放大器、AD模数转换器、置位/复位信号发生部分和微控制器MCU组成[3]。其中磁阻传感器通过惠斯顿电桥将地球磁场信号转化成差分电压量,再通过差分信号放大器进行放大,放大后的电压信号经过AD模数转换后传送至微控制器中进行滤波处理。置位/复位信号发生部分产生大电流脉冲使磁阻传感器的磁畴方向一致,来提高磁阻传感器的灵敏度[4]。
1.1 置位/复位脉冲电路
本文设计的磁强计通过微控制器产生置位SET和复位RESET控制信号,控制HEXFET驱动器的P和N沟道产生TSR和TRS延时,在其旁路电容中进行充放电,从而得到一电流脉冲,使得磁阻传感器进行了置位和复位。电路产生的置位/复位信号S/R如图3所示。

图3 置位复位信号波形图
经过置位或者复位以后,磁阻传感器的输出并不相同,从图4中可以看出,磁阻传感器在置位/复位以后,其斜率方向和大小均发生了改变[5]。

图4 磁阻传感器输出特性曲线
当需要高准确度测量磁场的时候,需要结合置位/复位信号来获取磁场信息。在每次测量磁阻传感器的输出时,先进行置位,读取磁阻传感器置位输出电压Vset,然后进行复位,读取磁阻传感器复位输出电压Vreset。再对两者相加除以2来获得如图4所示的电桥偏置值Voffset,如式(1)所示。

然后用Vset减去Voffset来获得磁阻传感器的实际输出值,这样能够消除因温度漂移和电路参数漂移等共模信号造成的影响[6],从而得出一个与待测磁场成正比例的输出。
1.2 电桥补偿
当被测磁场强度为零时,惠斯顿电桥应该平衡,两个抽头间的电压差为零。但是实际上由于电阻本身的容差,以及传感器电桥参考基准电压的误差导致电桥不平衡。因此我们采用在磁阻传感器的惠斯顿电桥的一个或多个臂上并联电阻对固有失配进行补偿,来实现零点的校正。
图5中Vin+、Vin-为磁阻传感器的正向电桥和负向电桥输出电压,RG为差分放大器的增益电阻,VREF为差分放大器的参考电压,本文中采用2.5V。其输出Vout的值如式(2)所示:


图5 差分放大器电路
通过置位/复位使得磁阻传感器的输出极性相反,但是输出端上的电桥偏置电压大小则保持恒定。图6中表示置位/复位时的电桥偏置电压输出。

图6 切换电桥偏置电压输出
置位/复位以后的磁阻传感器输出经过差分放大后为Vset和Vreset,通过式(3),可得经过差分放大后的电桥偏置Vb_offset为:

从式(3)看出,可以通过检测Vset和Vreset的值来判断惠斯顿电桥是正向或负向偏置。在表1中可以看出补偿前Vset和Vreset之和为3.8 V小于两倍的VREF(5 V),因此可以判断磁阻传感器存在负向电桥偏置,即当被测磁场为零时,图中的Vin-输出要大于Vin+输出。于是在Vin-输出端为R4并联一个接地的电阻R6来减小Vin-端的输出电压,阻值的确定可由式(3)和惠斯顿电桥公式算得。补偿后的Vset和Vreset的输出如表1所示:
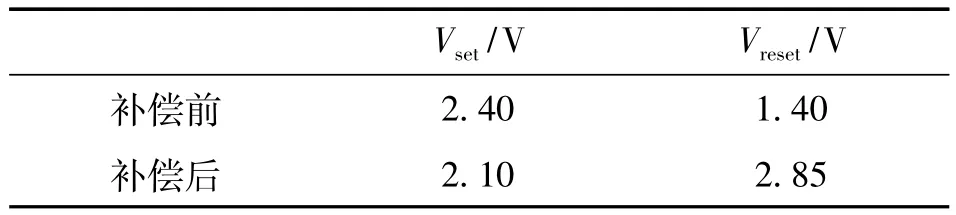
表1 补偿前后的Vset/V和Vreset/V
从表1中可以看出,补偿后的Vset和Vreset之和接近5 V,由此反推出校准后磁阻传感器的电桥偏置接近于零。
1.3 采样信号处理
磁阻传感器检测的地球磁场信号十分微弱,很容易受到外界工作环境的干扰。尤其是在地面进行测试工作时,受到50 Hz左右的工频以及其倍频的干扰,使得检测准确度大大降低,甚至影响其正常工作[7]。从图7中可以看出磁阻传感器的输出叠加了50 Hz左右的工频干扰信号。
因此在本设计中选用的AD模数转换器为Cirrus Logic公司生产的20 bit串行模/数转换器CS5513,其内部包括一个4阶Δ-Σ调制器和一个数字梳状滤波器。CS5513内部的梳状滤波器在47 Hz~63 Hz的频率范围内,存在-80 dB以下的衰减,同时在100 Hz时也有比较明显的衰减[8]。通过梳状滤波器的这种频率响应特性,对50 Hz工频以及其倍频起到了很好的衰减作用,极大程度上抑制了它带来的干扰。在某一固定轴存在强工频电磁干扰的情况下,采用普通AD转换器和本文采用CS5513的磁强计的输出结果如图8、图9所示。

图7 工频干扰后的输出

图8 采用普通AD的磁强计的输出

图9 本文的磁强计的输出
从上图可以看出采用普通AD转换器的磁强计的输出受到很大的工频干扰,波动较大。而采用CS5513的本文磁强计能够有效的滤去干扰,输出十分稳定。
经过AD采样后的数据在单片机中进行均值处理,其功能相当于一个低通滤波器,滤去奇异点,减少由于置位/复位的开关动作和环境磁场干扰产生的噪声,从而降低系统噪声。
1.4 磁强计输出标定
为了能够测量地球磁场的真实值,我们对本文磁强计的输出值进行归一化标定[9]。标定过程中以HONEYWELL公司的HMR2300作为参照,该磁强计的输出结果能够真实反映所测磁场大小。
本文中磁强计的输出大小取决于前端模拟放大部分的设定倍数。可以通过改变运算放大器的外接电阻RG来调整放大倍数,即调整磁强计的标度因数。
实验中将HMR2300和本文的磁强计分别水平置于转台上,通过实时采样数据找出输出值的最大值和最小值,计算它们之间的差值。假定HMR2300的标度因数为1,由式(4)计算磁强计的标度因数α。

式中Hmax、Hmin为本文设计的磁强计的最大值和最小值,H'max、H'min为HMR2300的最大值和最小值。
根据磁强计的标度因数,计算替换所需的电阻值。调整后重新测试,检查标度因数是否在0.95~1.05之间,如不满足要求,则需要再次进行标定。测得HMR2300和磁强计的极值如表2所示。

表2 磁强计的标度因数
可以发现,补偿过后磁强计的标度因数在0.99左右,也即磁强计的测量值应为实际待测磁场的真实大小。
2 磁强计测试及结果分析
2.1 磁强计标度因数测试
为了验证上文提及的磁强计输出标定方法的有效性,我们在北京某零磁场实验室进行了磁强计的标度因数实验。实验过程中把磁强计固定在零磁环境下的转台上,使Z轴指向垂直方向,操作零磁场环境,设置系统位置的磁场强度,并通过采样软件采集数据。X轴和Y轴的测量过程与Z轴相似。
本文设计的磁强计的X轴输出与环境磁场的线性关系如图10所示,其它轴情况与之相似。

图10 零磁环境下磁强计X轴输出
实验中测得本文磁强计与环境磁场的输入输出关系如表3所示。
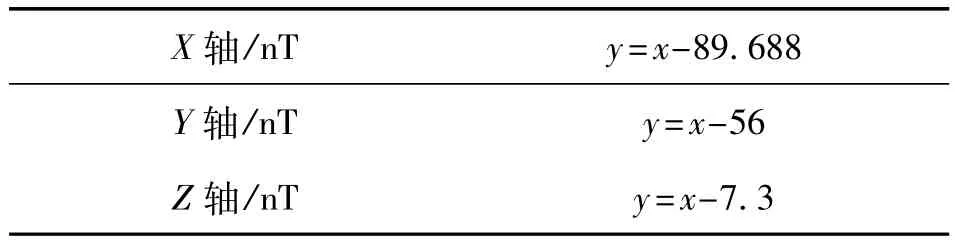
表3 磁强计与环境磁场的关系
表中x为标准环境磁场,y为磁强计输出。
由上表可以看出本文磁强计的各轴输出与标准环境磁场有很好的线性关系,从而验证该标定方法的有效性。
2.2 磁强计输出误差测试
为了测试磁强计的准确度,我们在室内普通环境中进行了地面测试。测试环境中存在诸多干扰因素,比如稳压源、星上通信器件以及其它用电设备的电磁干扰。实验中将磁强计水平放置于测试平台上,尽可能关闭其它用电设备,将环境干扰降到最小[10-11]。
磁强计的X轴测量误差如图11所示,其它轴与X轴相似。

图11 磁强计X轴输出
磁强计的测量误差如表4所示。
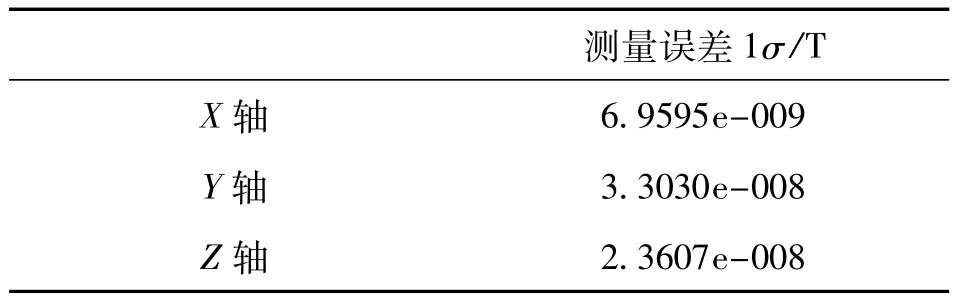
表4 磁强计的测量误差(1σ)
从表中可以看出磁强计在室内电磁干扰的条件下,仍能够保持高准确度,三轴测量误差接近10-8Tesla。
2.3 磁强计动态响应测试
皮卫星在太空运行期间可能因为异常情况出现大角度翻滚,因此有必要在一定角速度旋转的情况下,测量磁强计的动态响应特性。实验过程中将磁强计放置于转台上,设定转台的角速度,记录一段时间的采样数据。
转台的角速度为10°/s时磁强计的测试结果如图12所示。

图12 磁强计动态响应曲线
由上图可见磁强计在旋转过程中X、Y轴的磁场测量值呈三角函数变化,Z轴测试结果与X、Y轴相似,与理论相吻合[12-13]。可以看出磁强计在角速度10°/s时可以正常完成磁场的测量任务。
3 结论
本文设计的地球磁场测量系统满足了皮卫星的各方面要求,该测量系统中所设计的磁强计体积小、重量轻、功耗低、接口简单、测量准确度高,能够有效的抗空间复杂环境的干扰,满足皮卫星的要求。在2010年9月成功发射的浙江大学ZDPS-1A皮卫星中,该地球磁场测量系统工作正常。
[1]薛亮,李天志,李晓莹,等.基于MEMS传感器的微型姿态确定系统研究[J].传感技术学报,2008,21(3):457-460.
[2]Han Ke,Wang Hao,Jin Zhong-he.Magnetometer-Only Linear Attitude Estimation for Bias Momentupico-Satellite[J].Journal of Zhejiang University-Science A(Applied Physics& Engineering),2010,11(6):455-464.
[3]贺光红,韩柯,王昊,等.面向皮卫星的地球磁场测量系统设计[J].电子技术应用,2009,12(6):77-80.
[4]王泽民,胡波,邹鹏毅,等.玻莫合金磁阻传感器的应用探讨[J].声学与电子工程,2005,3(6):47-49.
[5]Honeywell 1-and 2-Axis Magnetic Sensors Datasheet[R].
[6]Caruso M J.Set/Reset Pulse Circuits for Magnetic Sensors[R].Honeywell Application Note.
[7]陈棣湘,潘孟春,罗飞路.三维磁敏传感器的设计及误差分析[J].传感技术学报,2006,19(6):642-644.
[8]Crystal CS5510/11/12/13,16 and 20-Bit,8-Pin Δ - Σ ADC Datasheet[R].
[9]朱兴乐,肖昌汉,闫辉.基于单轴定标的三轴磁传感器的误差校正[J].海洋测绘,2010,30(6):26-29.
[10]吴德会,黄松岭,赵伟.基于FLANN的三轴磁强计误差校正研究[J].仪器仪表学报,2009,30(3):449-452.
[11]徐涛,温东,孙晓磊.基于加速度计和磁强计的方位测量与校正技术研究[J].仪器仪表报,2009,30(10):2018-2022.
[12]林春生,向前,龚沈光.三轴磁强计正交误差分析与校正[J].探测与控制学报,2005,6(2):8-12.
[13]西永在,王传雷,刘江平,等.地面三分量磁测的观测误差分析[J].工程地球物理学报,2009,6(6):703-707.
猜你喜欢
西北工业大学学报(2022年2期)2022-05-11 07:51:28
机电信息(2021年25期)2021-10-15 14:51:22
空间科学学报(2020年4期)2020-04-22 01:17:10
燕山大学学报(2020年1期)2020-03-12 10:01:08
设备管理与维修(2019年16期)2019-12-23 02:49:00
温州职业技术学院学报(2018年4期)2019-01-21 08:54:10
传感器与微系统(2018年7期)2018-08-29 00:44:20
创新创业理论研究与实践(2018年22期)2018-03-28 08:38:14
科技资讯(2014年16期)2014-11-07 21:28:56
电测与仪表(2014年16期)2014-04-22 05:20:02