
电压空间矢量PWM控制技术的探讨
2011-10-12 03:27赵利
电气电子教学学报 2011年6期
赵 利
(山西大同大学电气工程系,山西大同037003)
电压空间矢量PWM,SVPWM(Space Vector PWM)控制技术是电力电子电路采用的重要控制技术之一,也是在实践应用中性能较好一种控制技术,掌握它对学习交流电动机调速系统知识具有重要意义。在有关SVPWM控制技术的文献中,由于一些关键性问题没有讲清楚,使我们无法准确全面地理解SVPWM控制技术。本文就这些关键性问题进行深入剖析。
1 问题的提出
对于基本的电压型逆变器,采用180o导通方式,如图1所示。如对三相开关的导通情况进行组合,共有八种工作状态。其中六种状态输出六个有效电压矢量u1~u6,两种状态输出两个零电压矢量u0和
在一个周期T1内,六个有效工作矢量顺序各作用一次,形成一个封闭的正六边形旋转磁场[2],如图2所示。
对于三相异步电动机,忽略定子绕组电阻和漏磁感抗压降后,可认为定子相电压U1=Eg,即[3]


图2 正六边形定子磁链旋转磁场
我们知道,在基频以下调速时,气隙磁通Φm是恒定不变的[4],即Eg/f1=常数。
现在的问题是对于基频以下调速,当频率f1降低时,电动机定子相电压U1亦降低。然而U1/f1值为何保持不变呢?下面就这一问题进行探讨。
2 基本电压矢量产生的SVPWM波
一般在实现SVPWM控制方法时,为了减少谐波分量,尽可能使PWM波形对称,在每相邻两个基本电压矢量之间依次插入零电压矢量u7和u0,得到的SVPWM波如图3所示。
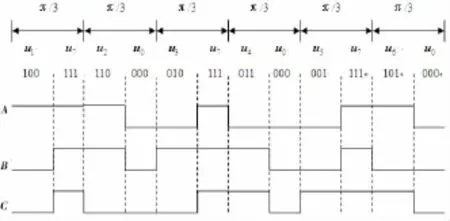
图3 零电压矢量和基本电压矢量共同实现SVPWM波
从图3可看出,A、B、C三相PWM电压波的基波成分大小相等、频率相同且相位相差2π/3电角度。将A相波形置于如图4所示坐标系中,结合图3容易知道图4中各点α1,α2,α3和α4的值,他们分别为α1=/3+ω1·Δt1,α2=/3+ω1·Δt1,α3=/3+ω1·Δt及α4=3+ω1·Δt1。
这里,为逆变器提供电源频率ω1==,每个有效电压矢量作用的时间为Δt1。


图4 A相电压的SVPWM波
式中,
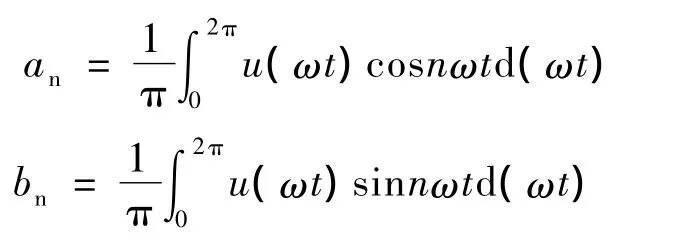
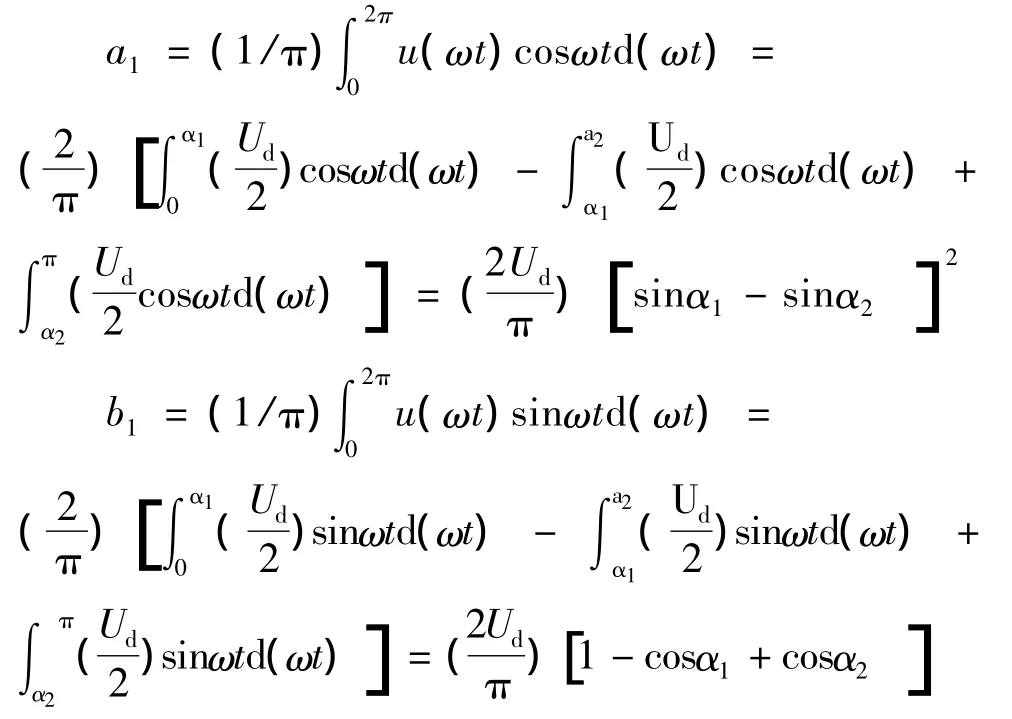
其基波分量a1和b1的值为
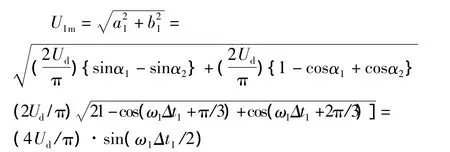
基波电压的幅值U1m为
基波电压幅值与频率比为

式中,ω1Δt1和ω1Δt0分别是一个有效电压矢量和一个零电压矢量在一个扇区/3弧度内作用产生的角度,即ω1Δt1+ω1Δt0=/3。当ω1Δt1<(1/3)(/3)=/9,即ω1Δt1/2<(/18),下式近似成立:

在此之所以作这样近似处理是根据实际情况出发,即SVPWM控制产生的都为多边形旋转磁场。如24边形旋转磁场,这样每个有效电压矢量作用的最大角度为ω1Δt1=2/24=/12,从而ω1Δt1/2=/24,则上式(4)更加精确。即U1m/ω1值逼近常数(2Ud/)·Δt1这里的Δt1,实际上是常数[2]。
可见,在基频以下调速时电压频率比近似为恒值,即与ω1无关。
3 结语
本文利用SVPWM控制技术产生的正六边形旋转磁场,在六个有效电压之间插入零电压矢量。我们利用得到的SVPWM波及傅立叶级数基本知识,可以证明基频以下调速时采用SVPWM控制技术逆变器输出电压频率比为恒值。这对准确而全面理解SVPWM控制技术,深刻掌握交流调速系统有关内容具有重要意义。
此外,要特别强调以下两方面问题。
(1)采用SVPWM控制技术的逆变器输出是PWM电压波,即交流电动机得到的是PWM波。所以上述提到的U1应该是指PWM波中基波成分的有效值(或幅值U1m=
(2)采用正六边形旋转磁场,目的是为了使证明变得简单。可以想象,对多边形旋转磁场结论亦成立,但会使证明复杂,同时结果更为精确。
[1] 王兆安,刘进军.电力电子技术(第5版)[M] .北京:机械工业出版社,2009
[2] 阮毅,陈伯时.电力拖动自动控制系统(第4版)[M] .北京:机械工业出版社,2010
[3] 李发海,王岩.电机与拖动基础(第3版)[M] .北京:清华大学出版社,2003
[4] 李华德.交流调速控制系统[M] .北京:电子工业出版社,2007
猜你喜欢
中国人民公安大学学报(自然科学版)(2022年1期)2022-07-20
新疆大学学报(自然科学版)(中英文)(2022年2期)2022-03-27
小哥白尼(趣味科学)(2021年6期)2021-11-02
山东交通科技(2020年2期)2020-08-13
童话世界(2018年32期)2018-12-03
测控技术(2018年9期)2018-11-25
学生导报·高中版(2017年23期)2017-09-10
学生导报·初中版(2017年23期)2017-09-10
电子制作(2017年20期)2017-04-26
电测与仪表(2016年5期)2016-04-22
