
高速磨削在线动平衡系统硬件设计*
2011-09-28 13:18尹明泉景敏卿樊红卫
制造技术与机床 2011年6期
尹明泉 景敏卿 刘 恒 樊红卫
(西安交通大学机械工程学院机械电子及信息系统研究所,陕西西安 710049)
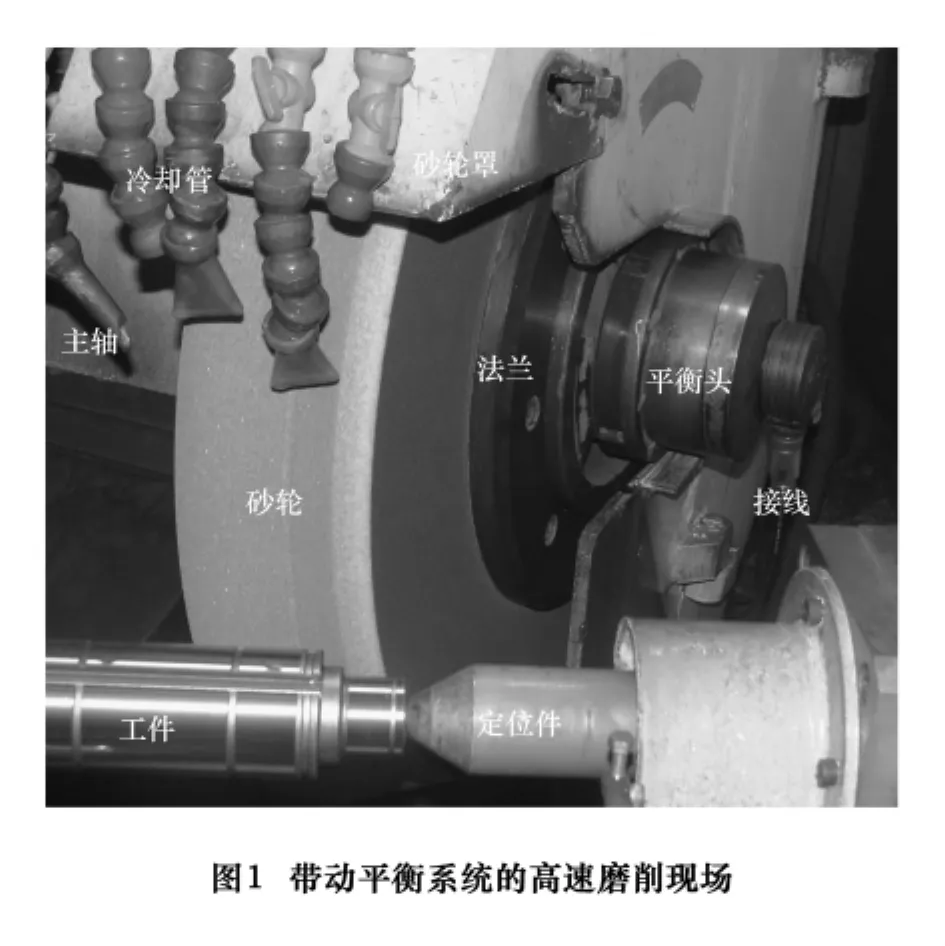
现代高速数控机床普遍采用电主轴取代传统机械主轴,因此主轴转速可达上万转,甚至数十万转。在如此高的转速下,电主轴的微小不平衡量,都将引起巨大的惯性离心力,进而造成机床的振动,导致工件精度和表面质量下降。因此,国内高档数控机床一般都配有专门的动平衡系统。图1是使用某国产数控磨床加工齿轮工件的工作现场(这里,仍采用机械主轴,工作转速为3 000 r/min)。图中,砂轮轴端安装了美国许密特工业公司研制的SBS自动平衡头。
在线自动动平衡是近些年兴起并开始在工程实际中应用的智能动平衡工艺。目前,国内机床上安装的在线动平衡装置主要来自美国、德国和日本等厂家。就一个普通的机械式SBS动平衡头,价格在8万元左右,而新型的电磁式平衡头更要大约14万元。因此,我国必须研制具有自主知识产权的在线自动平衡装置(含平衡头和测控系统),摆脱被国外产品垄断国内市场的局面。

国内关于自动平衡头的研究工作大概始于20世纪90年代。浙江大学汪希萱、曾胜、欧阳红兵[1-2],国防科技大学葛哲学、陶利民[3-4],北京化工大学何立东、沈伟、刘锦南[5-6],北京工业大学伍良生、杨庆坤[7-8]等人先后研究出了机械式和电磁式自动平衡头,但都未能投入使用,尚未见一套国内自主研发的动平衡系统用于数控机床主轴。
笔者在阅读前人文献过程中,深刻认识到电主轴已成为数控机床的核心功能部件,尤其成为制约高档数控机床发展的重要部件,而高转速、高精度、大功率、高可靠性的电主轴系统俨然已成为目前发展的主要方向。作为保证电主轴高速、高精度的平衡运行监测装置,其更是电主轴自动平衡过程中不可或缺的部分。要监测主轴的高转速,并对这种高转速主轴系统的不平衡振动进行主动平衡控制就需要监测系统在软件方面实现快速计算与决策,同时在硬件方面更应该具有良好的高速性和可靠性。本文通过DSP和FPGA相结合的方式实现信号的高速采集和处理。另外,由于要实现对不平衡振动的快速、精确控制,要求在信号采集过程中尽量保证信号的高信噪比,从而更容易地提取不平衡振动特征,因此采用三级信号调理电路(信号隔离放大、可编程截止频率滤波和阻抗匹配电路),以保证数字转换后信号的纯净度。因此,针对高速数控磨床砂轮—电主轴转子系统及其对高转速、高精度、高可靠性的要求,设计了一套实用的在线动平衡系统硬件,它包括测控系统和自动平衡头两部分。
1 在线动平衡测控系统硬件设计
动平衡测控系统的主要功能是完成不平衡量提取以及根据不平衡大小和方位驱动控制自动平衡头移动。因此,测控系统的硬件设备主要包括测振传感器、鉴相传感器、信号调理模块、A/D转换模块、DSP微处理器、FPGA模块和D/A驱动模块等,其相互连接关系如图2所示。
图中,在线动平衡测控过程为:首先,由传感器采集到振动信号和转速信号;经过信号调理模块对其隔离放大、滤波等前期处理;然后,经A/D转换,将离散数字序列存放在高速缓存区,利用可编程逻辑控制器FPGA将高速缓存区的数据传送给DSP模块。这些离散数据经由DSP模块进行信号特征提取和控制算法运算,一方面通过FPGA传给D/A模块输出信号进行动平衡控制,另一方面通过网络硬件协议栈W3100A上传至监测前端进行特征信号实时在线显示。在如上监测装置中,采用可编程逻辑控制器FPGA,有以下3个作用:(1)控制各器件的动作时序,使各个器件在不同时刻按规定的先后顺序执行;(2)对脉冲信号进行计数,以作为主轴转子转速和相位计算的参考标准;(3)作为数据传递的中间桥梁,由于FPGA和DSP采用HPI通信,使数据传输更为快捷。

在动平衡测控系统中,振动信号的硬件调理(主要是放大和滤波)对整个平衡装置的测试精度影响较大,笔者采用了如图3所示的信号调理模块。其中,模拟滤波器采用TLC04(可编程截止频率低通滤波器),其原理如图4所示。

从图4可知,TLC04是一个具有四阶开关电容的巴特沃斯滤波器,通过改变时钟发生器的输出可以达到改变不同截止频率,从而实现可编程滤波的目的。
从模拟滤波器输出的信号经过阻抗匹配电路,可以抑制信号的反射,获得最大功率输出,使输入DSP中的信号尽可能干净。
根据以上原理,笔者设计开发的振动信号调理电路如图5所示。
2 在线自动动平衡装置结构设计
由于机械式自动平衡装置结构复杂、需要特殊电动机,且平衡转速受限。因此,笔者采用新型电磁滑环式平衡头结构,如图6[6,9]所示。整个平衡头由动环和静环两部分组成,其中,动环是核心部件,随主轴转动,静环则与机床不动部分固连。这种结构的平衡头轴向和径向尺寸小、机械零部件少、离合简单,因此,理论上可用于更高转速场合。
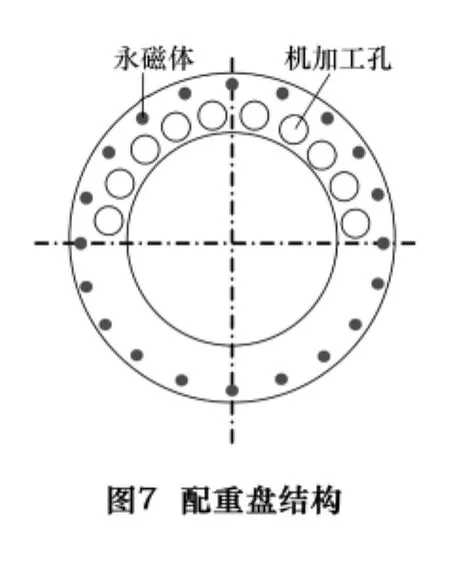
如图6c,静环是驱动机构,由线圈和铁芯组成。线圈有两组,每组分别控制一个配重盘。当控制器发出电压脉冲后,线圈得电,即产生电磁场,并磁化铁芯得到加强磁场。动环是执行机构,如图6a和b所示,靠过盈配合装在主轴上,随主轴一起转动。其内部为对称结构,包括2个配重盘、3个磁性板(中间和两侧)、2个隔磁板、2个滚动轴承、2个端部外壳。中间磁性板居于整个动环的中心,其他部件以它为中心对称组装。配重盘是动环的核心构件,结构如图7所示。

图7中,配重盘基体由铝或不锈钢制成。一般是在半个圆环面上均匀加工若干个孔以提供校正质量。在整个圆环面的外缘上均匀加工若干个小孔并在孔中镶入大小相同的钕铁硼等永磁材料作为永磁体,两个相邻永磁体的磁极方向相反。配重盘和主轴之间有两对滚动轴承,其内圈用过盈配合安装在主轴上,外圈与配重盘的内圈过盈连接。

本文设计的平衡头结构除了动作简单外,平衡头与主轴之间的离合方式也很简单,而且在文献[9]中已经证明是可靠的。该电磁平衡头的锁紧方式为磁路锁紧,原理如下:如图 8[10],a、c 是稳定平衡位置,b是中间过渡位置,这3个位置构成1个最小平衡作动单元。在图8a、c中,由磁阻最小原理,中间配重盘和两边磁性板能形成一个闭合回路,实现配重盘的锁紧。

图8中,a、c两个平衡位置的线圈磁场方向相反,这是靠驱动电压极性反向产生的。对线圈施加极性交替变换的电压脉冲的目的是保证配重盘沿同一个方向连续运动。
3 结语
(1)提出了机床主轴在线动平衡测控系统的硬件设计方案,并对不平衡振动信号的调理电路进行了详细设计。
(2)提出了电磁平衡头的基本结构,讨论了各组成部件的材料、形式和装配关系等,建立了该平衡头的三维模型。
(3)本文所设计的在线动平衡系统以“DSP+FPGA”为测控核心,以无需外加离合器的电磁平衡头为执行器,为旋转机械在线动平衡系统的国产化提供了一条可行的技术途径。
[1]欧阳红兵,汪希萱.两种新型电磁式在线自动平衡头[J].工艺装备,2002,40(455):47 -48.
[2]汪希萱,曾胜.电磁式在线自动平衡系统及其动平衡方法研究[J].热能动力工程,2003,18(103):53 -57.
[3]葛哲学,陶利民.新型电磁式自动平衡装置的研究[J].机械,2001,28(6):62-64.
[4]葛哲学.刚性转子自动平衡系统研究[D].长沙:国防科技大学,2002.
[5]沈伟,何立东,高金吉.应用电磁式主动平衡装置解决烟气轮机转子振动问题的研究[J].炼油技术与工程,2005,35(11):25 -29.
[6]刘锦南.电磁式自动平衡系统的实验研究及其在超重力机中的应用[D].北京:北京化工大学,2006:17-36.
[7]杨庆坤.高速主轴在线动平衡装置的设计与研究[D].北京:北京工业大学,2006.
[8]伍良生,贺江波,张云禧,等.高速主轴在线动平衡机构驱动器设计[J].北京工业大学学报,2007,33(12):1233 -1238.
[9]沈伟.旋转机械主动平衡技术及工程应用的研究[D].北京:北京化工大学,2006:21 -60.
[10]Moon Jong Duk,Kim Bong-Suk,Lee Soo-Hun.Development of the active balancing device for high-speed spindle system using influence coefficients[J].International Journal of Machine Tools and Manufacture,2006,46(9):978 -987.
猜你喜欢
一重技术(2021年5期)2022-01-18
制造技术与机床(2019年7期)2019-07-22
中小企业管理与科技·中旬刊(2018年9期)2018-12-07
制造技术与机床(2017年5期)2018-01-19
制造技术与机床(2017年7期)2018-01-19
制造技术与机床(2017年8期)2017-11-27
科技创新与应用(2017年17期)2017-06-16
浙江大学学报(工学版)(2016年11期)2016-06-05
中国高新技术企业(2014年4期)2014-03-10
组合机床与自动化加工技术(2014年9期)2014-03-01
