基于模糊自适应 PID算法的复卷机退纸辊张力控制
2011-09-27 08:21:06孟彦京刘圆圆
中国造纸 2011年2期
孟彦京 周 斌 刘圆圆
(陕西科技大学电气与信息工程学院,陕西西安,710021)
基于模糊自适应 PID算法的复卷机退纸辊张力控制
孟彦京 周 斌 刘圆圆
(陕西科技大学电气与信息工程学院,陕西西安,710021)
复卷机张力控制具有非线性、大滞后、强干扰特点,是复卷机电控系统的难点。常规 PI D在复卷机升降速及高速运行时控制效果不佳。模糊自适应 PI D控制可在线实时调整 PI D参数,适应系统在升降速及结构发生变化时的影响。结果表明,系统动态特性好,鲁棒性强,实现简单。
模糊控制;自适应控制;PI D控制;复卷机;纸幅张力
复卷机是卷筒纸生产过程中的最后一道环节,从抄纸机上生产出来的原纸卷,必须经过复卷之后才能作为成品纸出厂。为保证纸卷在运输、储存过程中不变形、不崩裂,在印刷设备或其他加工设备上能平稳运行,要求纸卷端面平整,具有一定的硬度,而且内紧外松,径向硬度分布均匀。要达到这些指标,其中重要的一点就是退纸辊张力的自动控制。
退纸辊张力控制通常采用 PI D算法,但是复卷机频繁的启停,以及高速运行下机械设备的震动,都给PI D控制器参数的选择以及如何调整参数克服扰动带来困难。在实际应用中,采用 PI D控制算法的退纸辊张力控制效果并不理想,不少学者转而采用其他方法[1-2]。本课题提出的基于模糊自适应 PI D算法的复卷机退纸辊张力控制,能够实现 PI D参数在线实时调节,满足系统的需要。
1 复卷机生产工艺及张力控制要求
1.1 复卷机生产工艺
在复卷过程中,纸幅从退纸辊上引出,绕过导纸辊、舒展辊,通过固定位置的纵切结构,从台机下面送入纸幅使其绕过后底辊,然后卷在卷纸轴上。在采取退纸辊张力控制时,通常纸幅张力检测器安装在导纸辊或舒展辊下,也可以单独设置一张力辊,不同机械各有不同。张力检测器有挂式及枕式之分。图 1所示为复卷机工艺图。
1.2 张力控制要求
综合复卷机在实际生产中的应用情况,张力控制应注意以下几点[3]:

图1 复卷机工艺图
(1)在正常运行中,退纸辊由纸幅拉着向前运行,要保持纸幅有一定的退卷张力,退纸辊电机应该是工作在发电制动状态。
(2)退纸辊在退卷过程中,纸辊直径一直在变小,要保持张力不变,退纸辊电机的制动力矩应该随着减小。
(3)考虑到成品纸卷有内紧外松的要求,当成品纸卷到一定大小时,纸卷本身重力不可忽略,此时应与压纸辊配合,适当减小张力,以调整纸卷的硬度。
(4)如果退纸辊电机使用的是直流电机,转矩的控制最终归结到直流电机电枢电流的控制上,在退纸辊大范围的调速中,要考虑励磁磁场的影响。
2 退纸辊张力模糊自适应 PI D控制原理
2.1 退纸辊张力控制
要获得较好的复卷效果,需要对复卷机退纸辊张力进行自动控制。传统 PI D控制可以采用 PLC实现,而采用模糊自适应 PI D算法后,依然可以采用 PLC实现,也可以采用专用模糊控制器来实现。控制结构如图 2所示。纸幅经过张力辊后,安装在张力辊两端的张力传感器将检测到的张力信号以 0~5V的标准电压输送到模糊控制器,模糊控制器经过推理,修改PI D控制参数,同时 PI D调节器输出直流调速器的速度给定信号。

图2 退纸辊张力控制原理
2.2 模糊自适应 PI D控制基本原理
PI D控制器是一种线性控制器,根据给定值r(t)与实际输出 y(t)构成控制偏差:
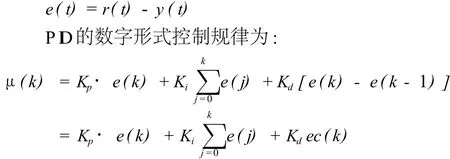
式中:k——采样序列,k=0,1,2,…;
μ(k)——第 k次采样时刻控制器输出值;
e(k)——第 k次采样时刻输入的偏差值;
ec(k)——第 k次采样时刻输入偏差的变化值;
Kp——比例系数;
Ki——积分系数;
Kd——微分系数。
模糊自适应 P ID控制器是一种在常规 P ID控制器的基础上,应用模糊集合理论建立参数 Kp、Ki和 Kd同偏差绝对值和偏差变化绝对值间的二元连续函数关系:


图3 模糊自适应 PI D控制原理图
(2)当 e·ec>0时,说明误差在朝着绝对值增大的方向变化。此时,若误差较大,可考虑由控制器实施较强的控制作用,以达到扭转误差绝对值朝减小的方向变化,并迅速减小误差绝对值;此时取较大的Kp,Kd不能太大,取较小的 Ki值。若误差绝对值较小,控制器实施一般的控制作用,只要扭转误差的变化趋势朝误差绝对值减小的方向变化。
2.3 模糊自适应 PI D参数整定模型
(3)当 e·ec<0,或者 e=0时,说明误差绝对值朝减小的方向变化,或者已达到平衡状态,此时,可采取保持控制器输出不变。
(4)e·ec=0,e≠0时,表明系统的曲线与理论曲线平行或一致。为使系统具有良好的稳态性能,应采取较大的 Kp和 Ki值,同时避免设定值附近振荡,并考虑系统的抗干扰性能,适当选取 Kd值。
对于模糊自适应 PI D的参数整定,可根据语言变量偏差 e及偏差的变化 ec,应用模糊逻辑推理,总结出一套 Kp、Ki和 Kd的模糊逻辑整定模型,见表 1、表 2和表 3。
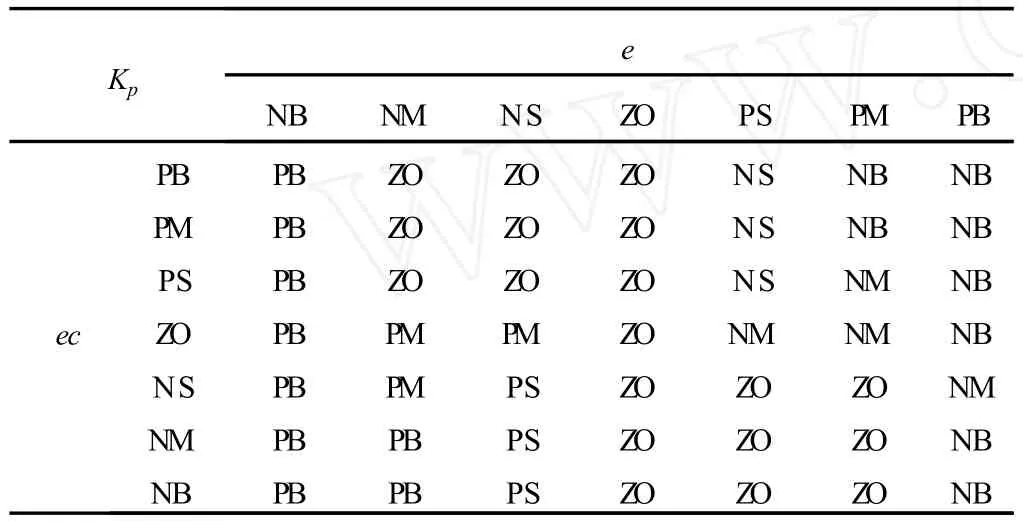
表1 Kp整定的模糊规则集合模型
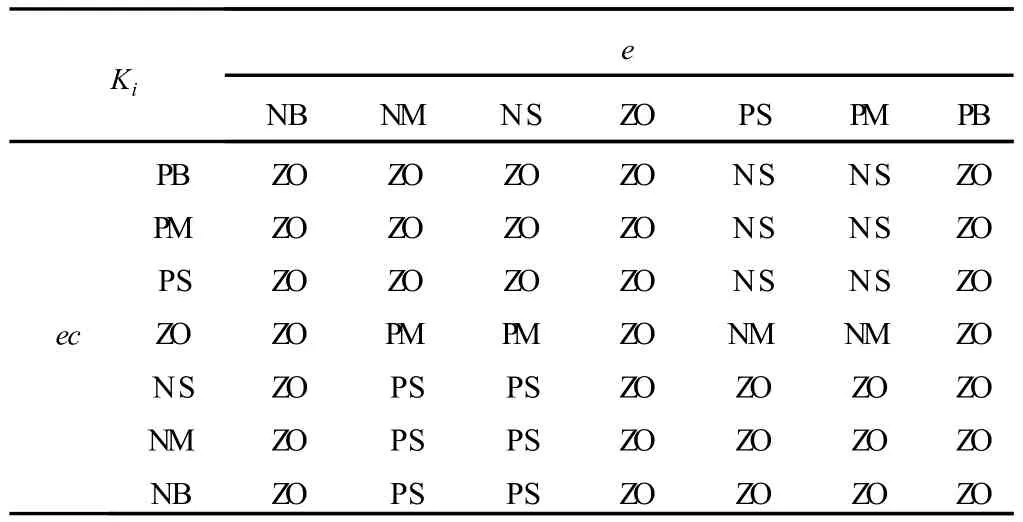
表2 Ki整定的模糊规则集合模型
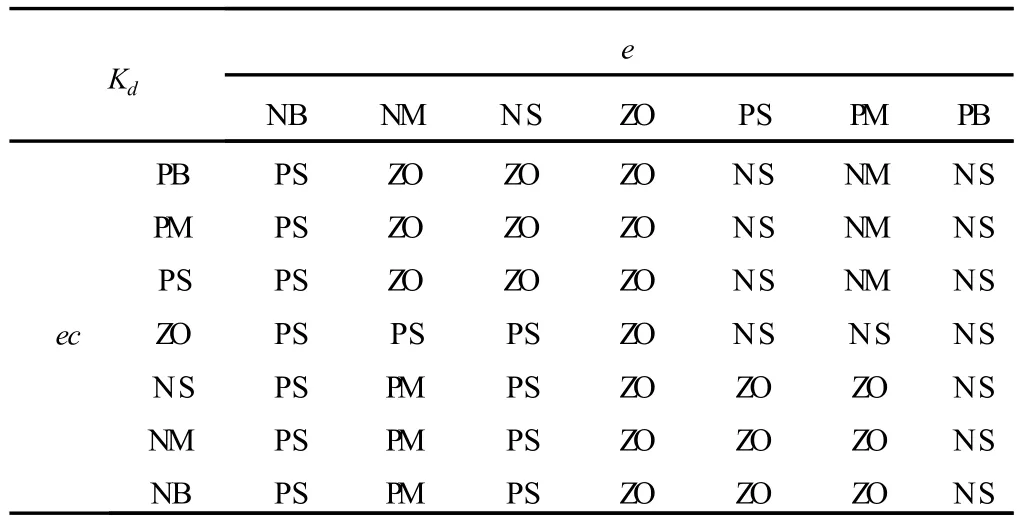
表3 Kd整定的模糊规则集合模型
3 模糊推理算法设计
3.1 输入量模糊化处理
纸幅张力与反馈值之差以及模糊控制器的输出变量分别为 e和μ,取其模糊语言变量为 E和 U,模糊论域都取为 [-3,3],并离散为 7个等级,模糊语言值分别为 {正大 (PB),正中 (PM),正小 (PS),零 (ZO),负小 (NS),负中 (NM),负大 (NB)}。模糊语言变量 E和 U的隶属度函数见表 4。

表4 模糊变量 (E、U)的隶属度函数表
纸幅张力偏差变化的变量为 ec,取其模糊语言变量分别为 EC,模糊论域取为 [-3,3],离散为 7个等级,相应的模糊语言值分别为 {PB,PM,PS,ZO,NS,NM,NB},模糊语言变量 E和 C的隶属度函数见表 5。
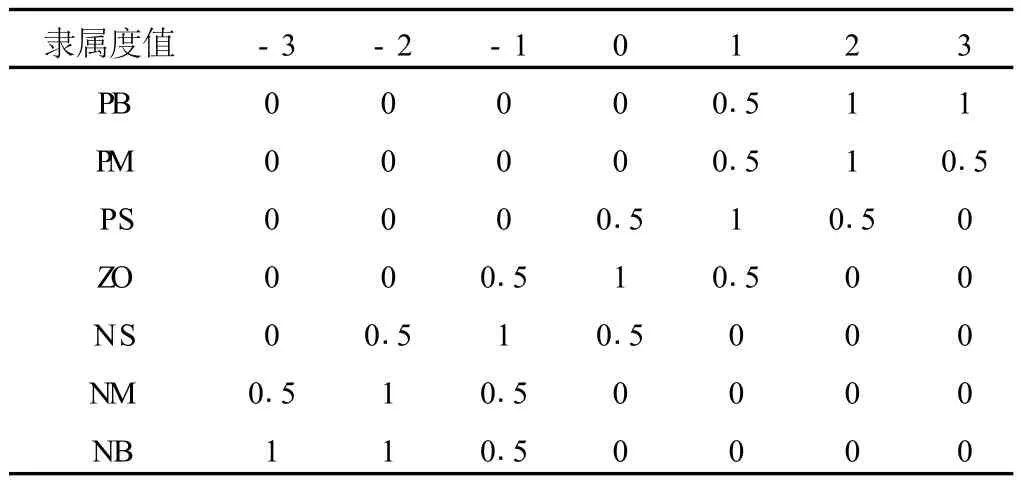
表5 模糊变量 (E、C)的隶属度函数表
3.2 模糊推理及解模糊判决
Mamdani的极小-极大推理对隶属度函数的选择有较大的宽余度,虽然有可能丢失一些有用信息,但是模糊推理合成对控制的影响不如解模糊化过程对控制的影响大。这里选用Mamdani的极小-极大推理法进行合成,采用加权平均法解模糊化[6]。
Mamdani推理采用蕴涵算子:

其模糊输出推理算式为:

在多规则时,可知其模糊关系式为:


若对 P ID参数分别进行模糊推理,根据Mamdani推理法,可形成 3×49条模糊推理规则,如表 1~表3,其中各表对应参数的输出变化,其模糊推理形式为:
(1)如果 E=PB和 EC=PB则ΔKp=NB
(25)如果 E=ZO和 EC=ZO则ΔKp=ZO
(33)如果 E=NB和 EC=NB则ΔKp=PB
…
以第 33条规则来说明,当偏差负大,并且其变化特性上升很快 (偏差变化为负大),为了使绝对误差值快速减小,应对比例系数 Kp进行正大调整,同时为了防止积分饱和,Kd应取较小值,而 Ki应取为零。
加权平均法较适合输出模糊集的隶属度函数是对称情况,其计算公式为:

式中,wj和μCj(wj)分别表示对称隶属度函数的质心和隶属度值。
为简单说明问题,以两个模糊为例说明加权平均法,如图 4所示,这里:


图4 加权平均法解模糊控制
3.3 PI D参数的调整
在控制的初始阶段,可以采用 PI D控制或 Ziegler-Nichols或 Bang-bang控制实现参数预整定。然后投入模糊自适应 PI D控制。经过模糊推理得到 PI D参数的修正量ΔKp,ΔKi和ΔKd后,按下面公式进行PI D参数调整。

4 模糊自适应 PI D算法的实现
在控制系统中选用西门子公司的 S7-300PLC,模拟量输入模块选用 12位 8通道的 S M331,模拟量输出模块选用 12位 4通道的 S M332。用 PLC实现模糊算法,主要包含 3部分:输入量模糊化、查模糊控制量表、输出解模糊判决。在编程时应注意几个主要问题:
(1)利用模拟量输入模块将输入纸幅张力信号采集到 PLC数据存储区,先经过平均值滤波处理,再作限幅量化处理,判断 e和 ec是否越限。如越限令其为上限或下限值。否则将输入量分别乘以量化因子αe和αec,量化为输入模糊变量 E和 EC。
(2)量化因子的确定。设模糊控制器输入偏差 e的实际论域为 [emin,emax],偏差变化 ec的实际论域为 [ecmin,ecmax],模糊控制器输出μ的实际论域为[umin,umax],而输入模糊语言变量 E、EC和 U的模糊论域为 [-3,3],可按下述公式确定量化因子大小:

(3)根据输入模糊变量的取值,查表可到模糊推理输出值,再分别乘以输出量的量化因子αu,便得到 P ID参数的调节量ΔKp,ΔKi和ΔKd。加上 P ID参数的原先值,便得到本次 P ID参数的实际值,在下个周期到来时,便以此参数进行 P ID运算,运算结果经过模拟量输出模块送入直流调速装置,控制退纸辊的制动力矩,完成退纸辊张力控制。
5 模糊自适应 PI D控制的稳定性及鲁棒性分析
5.1 模糊自适应 PI D控制的稳定性分析
相平面分析法在研究系统的动态过程和稳定性中非常有效,它不仅适用于线性系统也适用于非线性系统。根据模糊自适应 PI D参数整定模型 (见表 1~表3),按习惯的直角坐标方向安排控制表中的 e和 ec的量化等级,这样控制表相当于一张相平面的非线性区域分布图,如图 5所示。由图 5可以看出,系统是稳定的。
5.2 鲁棒性分析
模糊控制器本身不需要被控对象的精确数学模型,当被控对象结构或参数发生变化时,对系统的稳定性影响不大。模糊逻辑控制是采取模糊语言来描述被控量,采用模糊逻辑推理来确定控制量的大小,因此,被控量微小的变化对控制量影响并不大,而且被控量的测量值本身就包含各种干扰因素,过多地追求被控量的精确性反而会降低控制器的精度,这也是模糊控制器不同于其他控制器的地方之一。模糊控制器对扰动的包容性,也增强了模糊控制器的抗干扰能力。

图5 模糊自适应 PI D向平面分析
6 总 结
模糊控制鲁棒性强、调节迅速,但是系统存在稳态误差;PI D控制能有效地克服静态误差、稳定性好、简单易于实现,但是当系统存在大滞后及参数发生较大变化时,其稳定性差。模糊自适应 PI D控制把模糊控制和 PI D控制结合起来,对控制系统的比例、积分、微分参数进行在线自整定,控制超调量小,鲁棒性强;其模型规则物理意义明确,实时计算工作量小,综合了模糊控制与 PI D控制的优点,很好地解决了复卷机退纸棍张力控制的难题。同时,采用 PLC实现模糊自适应 PI D算法,利用了复卷机电控系统原有的 PLC,在不增加硬件设备的情况下,大大提高了系统的智能化程度。
[1] 袁佑新,杨 婕,甘 伟,等.基于模糊控制算法的复卷机张力控制系统[J].中国造纸,2006,25(1):29.
[2] 高承雍,闫永志,康家玉.交流复卷机张力控制[J].中国造纸,2004,23(12):39.
[3] 康家玉,米林安,高承雍.复卷机退卷张力控制的研究与应用[J].中国造纸,2004,23(6):35.
[4] 王孟效,孙 瑜,汤 伟,等.制浆造纸过程测控系统及工程[M].北京:化学工业出版社,2003.
[5] 李臣明,张邦楚,韩子鹏,等.B IT导弹模糊自适应 PI D控制[J].弹箭与制导学报,2005,25(2):487.
[6] 诸 静.模糊控制原理与应用[M].北京:机械工业出版社,2005.
(责任编辑:马 忻)
Paper Tension Control of Re-winder Based on Fuzzy Adaptive PID Algorithm
MENG Yan-jing ZHOU Bin*LIU Yuan-yuan
(College of Electric and Information Engineering,Shaanxi University of Science&Technology,Xi'an,Shaanxi Province,710021)
(* E-mail:zhoubin 88168@163.com)
The paper proposed a new algorithm to produce a solution for paper tension control of re-winder.The algorithm is based on fuzzy control and adaptive PI D control,which adjusting PI D parameters online by fuzzy logic reasoning.The algorithm can be easily realized by programmable logic controller(PLC).In practice,when re-winder speed increase,or decrease,it can have better tension control.Result shows that system using this algorithm is steady and robust.
fuzzy control;adaptive control;PI D control;tension control;re-winder
TS734+.7
B
0254-508X(2011)02-0041-05
孟彦京先生,教授;研究方向:电力电子与电力传动、现场总线技术及其在的电力传动中的应用等。
2010-09-02(修改稿)
本课题由陕西科技大学研究生创新基金资助。
猜你喜欢
新世纪智能(高一语文)(2020年9期)2021-01-04 00:42:52
生活用纸(2019年6期)2019-02-13 13:20:21
中华诗词(2018年4期)2018-08-17 08:04:12
宝藏(2017年6期)2017-07-20 10:01:02
宝藏(2017年6期)2017-07-20 10:01:01
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
生活用纸(2016年10期)2016-04-06 02:33:03
通信电源技术(2016年5期)2016-03-22 01:09:57
中国造纸学报(2015年1期)2015-12-16 19:35:27