
直升机驾驶人员的可靠性分析与研究
2011-09-15 05:12陈圣斌周晓光曾曼成
直升机技术 2011年4期
陈圣斌,高 峰,周晓光,曾曼成
(1.中国直升机设计研究所,江西景德镇 333001;2.陆航驻景德镇地区代表室,江西景德镇 333000)
0 引言
按照GJB451的可靠性定义,直升机的可靠性,即是在规定的条件下和规定的时间内,完成规定功能的能力。在这一定义的三个“规定”中,规定的时间和规定的功能都易于理解,而规定的条件,除了直升机本身的状态之外,还应包括操纵和控制直升机飞行的人员及直升机的外部环境条件。无疑,只有这三个条件都正常时,直升机在规定的时间内才能安全可靠地完成飞行任务。显然,规定的条件应包括直升机本身的状态、驾驶人员的条件及外部环境条件。
在以往的型号设计中,人们所关心的是直升机的状态,认为直升机完成规定功能的能力仅取决于直升机,直升机飞行的可靠性是由直升机的可靠性决定的。因此,在直升机可靠性工作中,无论是建模、分配和预计,还是可靠性的各种分析(FHA、FMEA、FTA等),都是以直升机为中心开展可靠性设计分析,对于人——操纵和控制直升机的驾驶人员,在整个任务时间内,都认为是能安全可靠地工作。
仅仅以直升机本身的状态或者仅以直升机为中心开展直升机可靠性的分析和研究工作,这不只是国内的做法,也是国外的通行做法。无论是美国的UH-60、AH-64、V-22、RAH-66、S-92,还是欧直的“虎”式直升机、EH-101以及NH-90等直升机,它们的可靠性分析研究,都是以直升机为分析对象,在它们的FHA、FMEA、FTA等报告中,对人的失误和差错都不予以考虑。
事实上,从以往的统计数据来看:
1)在直升机的飞行事故中,有70%是人的失误引起的[1];
2)在直升机的故障中,也有20~30%是人的差错造成的[2]。
不难看出,在研究直升机的安全性、可靠性时,假设人的工作,即驾驶员操纵控制直升机的工作是安全可靠的,显然是不合理的。
随着航空科学技术的发展,直升机的可靠性在不断地提高,然而直升机的飞行事故还是居高不下,有人甚至预言,随着航空运输的高速发展,到2015年,每星期将会发生空难一次。因此,美国航空运输协会要求减少人的失误,以提高直升机飞行的安全性和可靠性[1]。
如何来研究人的可靠性一直是一个棘手的问题。人的可靠性或人的行为差错是受到各种因素的影响的,如人的体能限制(如人操作键盘的差错率为2%)、社会环境、企业文化、培训、技能水平、家庭环境、人际关系等。显然人的可靠性是一个多变量的函数。
人们在长期的工作实践中,积累了许多操作控制失误或差错数据,建立了许多人的可靠性分析方法。本文试图根据这些人的失误/差错数据,以及1961年Swail和Rock提出的THERP(Technique for Human Error Rate Prediction)方法,分析研究直升机驾驶人员操纵控制直升机的可靠性,以拓展直升机的分析研究范围,使直升机可靠性分析、计算更为完整,更与实际使用相符,找出薄弱环节(如人的操作键盘差错率太高,影响信息输入,此时可通过语言控制实现信息输入),通过改进措施,提高驾驶员操纵控制直升机的可靠性。
(注:关于环境条件对直升机可靠性的影响,另文讨论)
1 人的失误/差错
1.1 人的失误模式[3]
人在实际工作中,或者驾驶员在操纵控制直升机的过程中,大致有12种人的失误模式,即:
1)错误地执行任务或完成操作;
2)未能完成任务或操作;
3)在错误的方向上执行任务或完成操作;
4)执行错误的任务或操作;
5)任务或操作重复;
6)在错误的接口单元上执行任务或操作;
7)实施的操作太早;
8)实施的操作太迟;
9)实施的操作太快;
10)实施的操作太慢;
11)误读或误判信息;
12)其它。
对于某一具体的工作程序,人的失误应根据其程序中的各个步骤予以描述,例如直升机冷转开车程序的每一操作步骤的人的失误描述如表1所示。

表1 人的失误描述
1.2 人的失误概率
人的失误概率是人的可靠性度量的主要参数,其定义如下:
式中:En为某一给定失误模式的总次数;Ope为发生差错或失误的机会总次数;HEP为某一给定操作的失误概率。
表2给出操作(部分)的人的失误概率。
表3给出了显示器上计数时人的失误概率。
表4给出了操纵人员失误的概率估计。这些失误数据参见参考文献[4]。
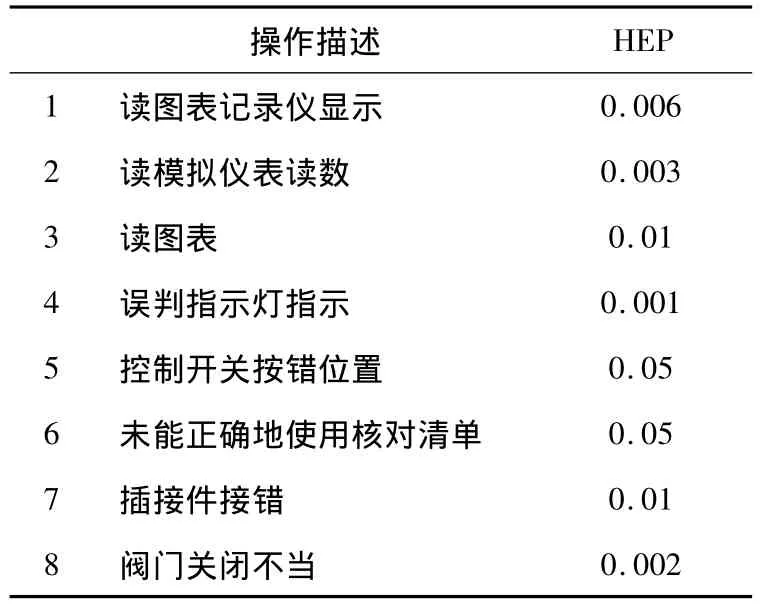
表2 部分操作人员的失误概率

表3 显示器上判读时的人的失误
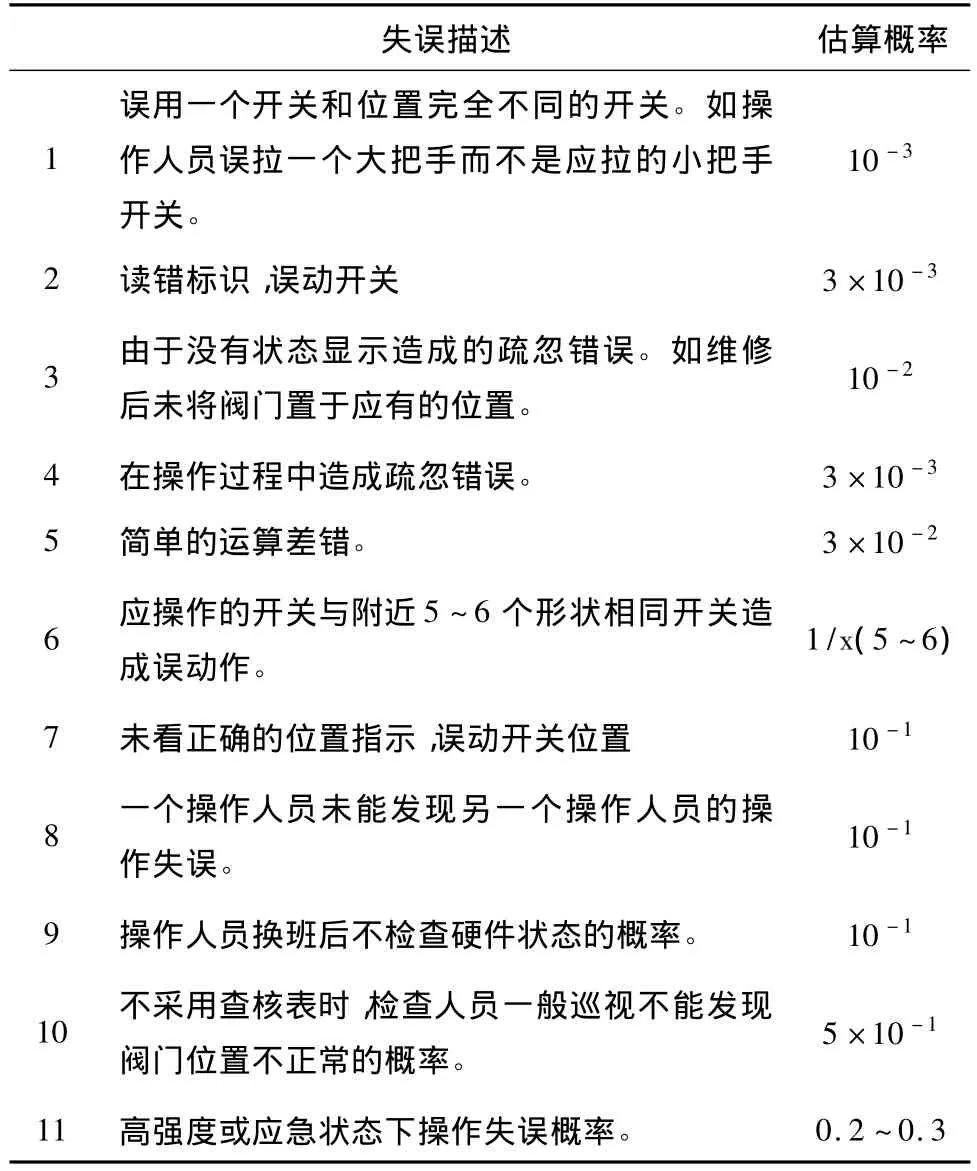
表4 操作人员的失误概率
2 人的失误计算方法
本文采用1961年Swail和Rock提出的THERP(Technique for Human Error Rate Prediction)方法来分析计算人的操作或控制的人的失误概率。这是工程技术进行安全性分析时的通用分析方法,在核工业部门也曾广泛地应用于人的可靠性问题的计算。
这一分析计算方法的步骤如下:
第1步 进行操作分析
操作分析又称任务分析。它是把人员的操作分解成一系列相连贯的顺序动作步骤,以便建立事件树。对于每一动作步骤必须确定:操作的部件、人员的操作动作、潜在的人的失误、控制显示状态。
通常是以表格的方式描述这种操作分析。表1给出了直升机发动机开车冷转程序的操作分析。
第2步 建立人员的可靠性分析事件树
事件树是描述人员进行操作过程中一系列操作事件序列的图形表示方法。事件树的每一次分叉表示事件在处理过程中的必要操作,这种操作可能正确完成或失误,而每个事件中的枝终点表示一项操作的结束。它代表此项任务成功(S)或失败(F)。
图1给出了直升机发动机开车冷转程序的人的可靠性分析事件树。

图1 直升机发动机开车冷转程序人的可靠性分析事件树
必须指出,建立人的可靠性分析事件树是可靠性分析的基础,这是重要的分析工作。
该例的事件树较为简单,对于复杂系统事件树的分析,参见参考文献[4]。
第3步 人的失误概率选取和计算
确定人的可靠性分析事件树中人的操作失误的概率,在绝大多数情况下是十分困难的。它通常带有很大的主观性和经验性。目前常用的人的失误概率是以核电站人员可靠性分析手册的数据为主(参见表2、表3和表4,也可参见参考文献[5]和文献[6]给出的数据),并根据专家的判断进行选取。
第4步 行为形成因子的估算
操作人员因自身因素及作业环境的影响,事件树中所列出的人的失误概率还会发生变化。这种变化可以用行为形成因子来表述。限于篇幅,各种应力水平的行为形成因子参见参考文献[4]。
在注册安全工程师手册中,这种行为形成因子是以修正系数来描述。作业时间、作业频度、危险状态、心理状态、环境条件等因素的修正系数参见参考文献[5]。
第5步 操作之间的相关性
正如上所述,每一项工作程序都是由许多相互有联系的操作步骤逐步进行的。正如表1所示,只有保持T4温度在200℃以下,其后才能将相应的发动机油门手柄置于后极限位置。因此每一操作步骤之间条件概率与操作之间的相依程度相关。在THERP方法中将操作之间的相依性分为5类,并给出了相应的概率计算公式。
1)完全相依:PF(B|A|CD)=1
5)零相依性:PF(B|A|ZD)=HEP
式中,HEP是B操作发生的人的失误概率。
第6步 操作链概率的计算
操作链的概率计算或操作程序的人的失误概率计算,是把每一步骤操作的条件概率相互乘积起来,即得到该操作链或操作程序中人的失误概率。然后把每一步操作链概率相加起来,即得到整个程序的人的失误概率。
按照上述计算方法,图1发动机开车冷转程序的人的失误概率计算如下:
P(F1)=0.0004
P(F2)=0.9996·0.0002
P(F3)=0.9996·0.9998·0.002
P(F4)=0.9996·0.9998·0.998·0.0007
P(F)=P(F1)+P(F2)+P(F3)+P(F4)=0.0033
3 人的失误计算方法在直升机的可靠性分析中的应用
3.1 分析程序
在直升机的可靠性分析中,可应用上面的人的失误计算方法分析计算直升机驾驶人员操纵控制失误的概率。其分析程序如图2所示。

图2 直升机人的可靠性分析程序
3.2 应用说明
现以直11型机为例,说明人的失误分析计算方法(THERP)的具体应用。按照图2的分析计算的应用程序,其步骤如下:
第1步 分析直11型机的飞行任务剖面
按直11型机研制任务书的要求,该型机包括起落航线飞行、转场飞行、空域飞行、救援搜索飞行等7个飞行剖面。
第2步 选择典型的飞行任务剖面
通常选择驾驶人员操纵控制动作最多的飞行任务剖面作为研究分析对象。只要该任务剖面人的失误概率能满足要求,其它飞行任务剖面的人的失误概率也就能够满足其要求。
因此,对于直11型机,可选择救援搜索飞行的任务剖面为人的可靠性分析研究对象。
第3步 将所选择的飞行任务剖面分成各个任务阶段。
根据救援搜索飞行剖面的分析,该飞行剖面分解为图3所示的14个任务阶段,包括:开车起动、起飞、爬升、平飞、下滑、曲线飞行、贴地飞行、救援搜索飞行、贴地飞行、曲线飞行、爬升、平飞、下滑、着地。

图3 救援搜索飞行剖面
第4步 将上述的14个任务阶段都分解为系列的连贯的顺序动作。
阶段0开车起动这一任务阶段的操纵控制的连贯顺序如表5所示。
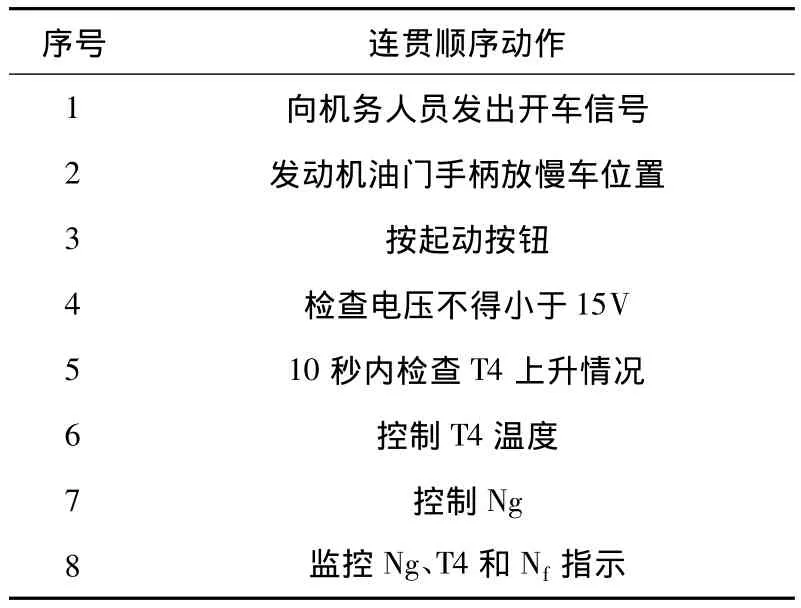
表5 开车起动连贯顺序动作
阶段1~阶段5
同样,可将阶段1~阶段5,起飞、爬升、平飞、下滑、曲线飞行等5个飞行阶段分别分解为连贯顺序动作。
阶段6贴地飞行这一阶段的操纵控制的连贯顺序动作如表6所示。
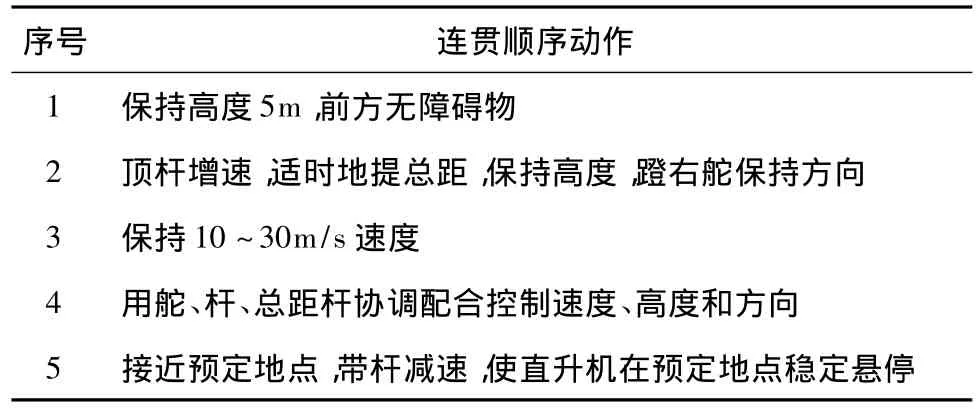
表6 贴地飞行连贯顺序动作
阶段7~阶段13
同样可将阶段7~阶段13救援搜索飞行后续的8个任务阶段分别分解为连贯顺序的动作。
第5步 按第二节的人的失误分析计算方法,完成每一飞行任务阶段人的失误分析计算。
按第4步完成了救援搜索飞行剖面共计14个任务阶段的操纵控制过程的连续顺序动作分解之后,就按第二节的程序对每一任务阶段建立人的可靠性分析事件树。
例如,阶段6贴地飞行阶段人的可靠性分析事件树如图4所示。
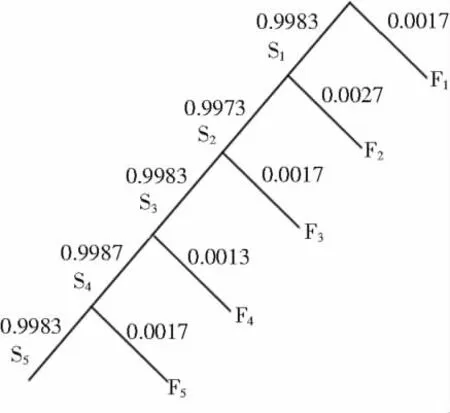
图4 贴地飞行事件树
上面事件树中的成功概率(S)和失效概率(F)是根据表2~表4的失误概率,并根据直升机空勤人员的判断选取的。
由于上述操作都是由合格的空勤人员完成的,他们所在的驾驶舱都是环境控制的合适的环境条件,其行为形成因子PSF应为1。
另外,上述的每一操作控制动作都是连贯的顺序动作,前一个动作的失误将导致后一个动作的失误。因此,前后动作完全相依。
在完成上述的分析之后,便按第二节的第5步进行操作链的概率计算,图4贴地飞行阶段的人的失误概率计算结果为

采用以上相同的分析计算方法,求得整个救援搜索飞行任务剖面各个飞行阶段的P(F)和P(S)值如表7所示。

表7 救援搜索飞行各阶段人的可靠性计算结果
第6步 计算整个飞行任务剖面驾驶人员操纵控制的可靠性
1)救援搜索飞行任务剖面的人的可靠性分析事件树
根据表7的计算结果可得该任务剖面的人的可靠性分析事件树如图5所示。2)按图5的事件树,计算整个救援搜索任务剖面的驾驶员操纵控制可靠性

图5 救援搜索飞行剖面人的可靠性分析事件树
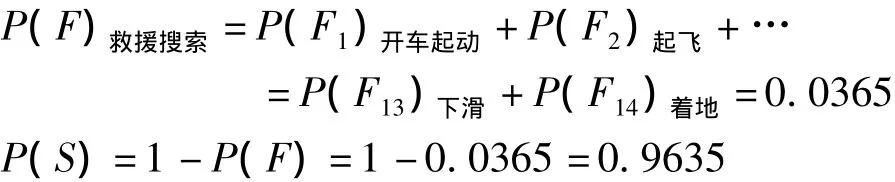
第7步 与所要求的人的失误概率比较
如果研制任务书中,或研制部门根据研制要求提出新研直升机驾驶人员的操纵控制的失误概率,那么将其与前面分析计算的结果(如救援搜索的P(F)=0.0365比较),如小于要求值,即分析结果满足要求。如不满足要求,即按第三节的第8步进行灵敏度分析,找出影响整个飞行任务剖面的人的失误的主宰因素,然后采取相应措施,减少人的失误概率。这些措施包括改进人机接口关系,如采用语音输入代替作动键盘或开关输入;增加相应的警告装置;改进操作特征;加强空勤资源管理;增强人的培训等。
4 结论
通过上面的研究分析可以得出如下结论:
1)THERP是一种很通用的人员操作的可靠性分析方法。只要掌握和理解系统整个操作程序,操作动作的成功、失败的定义以及人的失误概率,这种人的可靠性分析和计算方法是易于应用的;
2)THERP是一种定性定量的综合分析方法,它适用于工程领域的人的可靠性分析和计算;
3)人的可靠性分析计算也是一种迭代分析过程,随着设计过程的发展及信息资料的更新,此分析计算过程重复进行,从而获得合适的结果;
4)应当指出,在直升机的可靠性分析中,考虑人的失误之后,对包括人-机-环境系统在内的直升机的可靠性存在着明显的影响;
5)在人的可靠性分析中,由于人的失误数据的不足信,因此通过人的失误分析,找出薄弱环节,采取相应措施,提高人的操作控制的可靠性,比之严格的定量计算更有意义。
致谢:
本文的撰写过程中,得到陆航研究所杨宇航主任的指导和帮助,在此表示感谢。
[1]佐久間,秀武.ヒヱ-マンフュクヶ-実践講座 ③ヒヱ-マンフュクヶ-でなぜ事故をなくせるのか[J].航空技術,2003,579(6):68-69.
[2]Sherry L,Fennel K.Human-computer Interaction Analysis of Flight Management System Message[J].Journal of Aircraft,2006,143(5):1372-1373.
[3]Stanton N A,Harris D,Salmon P M.Predicting design induced pilot error using HET(Human Error Template)-A new formal human error identification method for flight decks[J].The AERONAUTICAL JOURNAL,2006(2):107-114.
[4]黄祥瑞.可靠性工程[M].北京:清华大学出版社,1990,P190-209.
[5]罗 云,徐德昌,等.注册安全工程师手册[M].北京:化学工业出版社,2004.8.
[6]飞机安全性设计和评估[M].北京:航空工业出版社,2007.
猜你喜欢
中国科技纵横(2022年17期)2022-10-25
环球时报(2022-09-15)2022-09-15
军事文摘(2022年15期)2022-08-17
电子制作(2018年23期)2018-12-26
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年2期)2017-05-17
电子制作(2017年2期)2017-05-17
北京航空航天大学学报(2016年6期)2016-11-16
船舶标准化工程师(2015年5期)2015-12-03
海峡姐妹(2015年3期)2015-02-27
