
基于CAN总线的船舶自动气象站的研究
2011-09-07 10:10牛涛
武汉船舶职业技术学院学报 2011年6期
牛 涛
(武汉船舶职业技术学院电气与电子工程学院,湖北武汉 430050)
自动监测和报警气象条件是影响船舶航行的重要因素。在走航过程中,船舶所面对的海洋环境复杂,需要建立气象站对海面气温、海表温度、风向、风速等进行监控。随着航运业的迅猛发展,传统船舶气象仪存在诸多不足,如进行热电耦电桥法温度测量仪,测量过程复杂,数据实时性、传输距离和抗干扰能力难以满足需要,亟需构建新型的船舶自动气象站。
CAN现场总线是德国Bosch公司开发的串行数据通信协议,在汽车复杂控制及仪表数据交换方面得到充分应用,其实时性强、传输距离远、抗电磁干扰能力强等优点尤为突出[1],能较好适应船舶航行时的复杂环境,弥补传统船舶气象仪的不足,为构建新型船舶自动气象站创造了有利条件。
1 系统总体结构
系统采用CAN现场总线进行数据通讯,传输媒体采用双绞线,通讯速率根据船舶环境可选50kbps(270m)一125kbps(350m)[2],如图1系统总体结构。
2 CAN总线硬件设计
2.1 CAN总线适配卡
CAN适配卡采用了PLX公司的PCI 9052,作为监控主机与总线的接口设备,通过该芯片可以快速完成CAN总线到监控主机PCI总线的转换。PCI 9052工作时,需要EEPROM存储配置信息,设计采用Microchip公司93LC46存储芯片。CAN适配卡与测控节点都采用SJ1000控制器芯片为CAN控制器接口。

图1 气象站总体框图
2.2 主采集器
主采集器是整个数据采集的核心,主要实现常规气象要素数据采集和实时采集分采集器数据的功能。主采集器采用江苏省无线电科学研究所自主研发的ZQZ-BH型数据采集器,该主采集器支持CAN总线结构,传感器可任意增减和组合,观测的气象要素数量不受限制。
2.3 分采集器
分采集器为智能量分采集器,采用江苏省无线电科学研究所自主研发的ZQZ-BM型数据采集器。主要扩展连接智能型传感器,如超声风传感器、能见度传感器等。分采集器通过CAN总线与主采集器进行物理连接。
3 系统软件设计
3.1 PID算法程序设计
PID控制是根据实际测量值与设定值进行比较运算读出控制量。PID控制运算程序由监控主机部分和节点微控制器部分组成,程序框图如图2、图3所示。
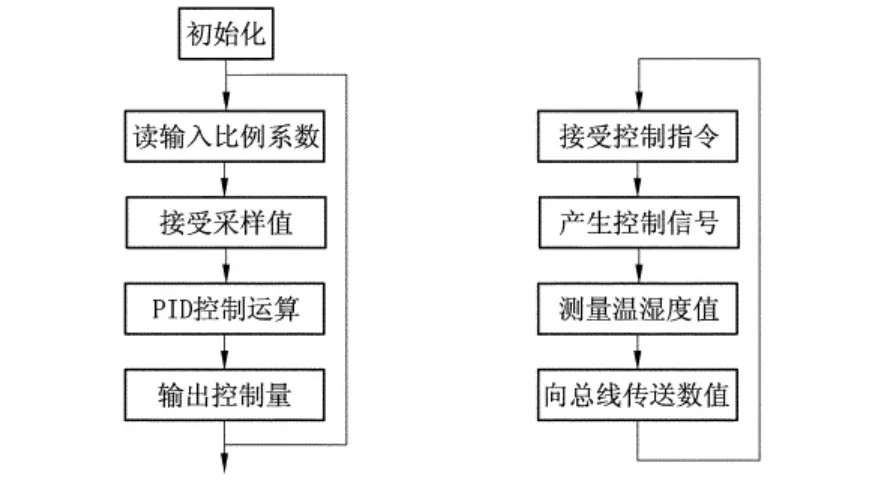
图2 监控主机端程序 图3 节点端程序
3.2 CAN适配卡及上位机软件设计
包括监控主机的驱动软件设计和负责通信的COM程序设计。考虑到系统的通用性,可采用支持Windows XP、Windows 2000的WDM驱动程序。开发工具可以采用Visual C++6.0和Windows 2000DDK。
此外,主采集器和分采集器之间采用CANOPEN的通信协议进行数据传输,因此还须开发CAN总线结构驱动程序。
4 传感器选型
船舶自动站中使用的传感器分为两种:模拟量传感器(输出模拟量信号的传感器)和智能型传感器(带有嵌入式处理器的传感器,具有基本的数据采集和处理功能,输出串行信号),见表1。

表1 传感器选型
5 结 语
基于CAN总线的船舶自动气象站,不仅可以对海面气温、海表温度、风向、风速等进行监控,还可以对各项数据进行实时分析、处理,提高了船舶气象的信息化水平。而CAN总线以独特的设计思想,良好的可扩展性和可靠性,必将进一步融入到船舶自动化系统中。采用这种技术的船舶自动气象站,具有性能可靠、易于维护的特点,发展前景广阔。
1 庄景齐,吴雁.基于CAN总线的温湿采集系统的设计[J].中国科技信息,2009(2):139-140
2 于宏波,宋文杰.现场总线技术在船舶气象仪系统中的应用[J].山东科学,2005(5):67-69
3 张钛仁.海洋船舶气象观测信息有关情况调研报告[J].气象软科学,2008(4):83-87
猜你喜欢
环球时报(2022-05-05)2022-05-05
现代仪器与医疗(2021年1期)2021-06-09
趣味(语文)(2019年3期)2019-06-12
电子制作(2018年11期)2018-08-04
中国资源综合利用(2017年4期)2018-01-22
计算机测量与控制(2017年6期)2017-07-01
计算机测量与控制(2017年6期)2017-07-01
气象研究与应用(2016年4期)2016-02-27
空间控制技术与应用(2015年2期)2015-06-05
舰船科学技术(2015年8期)2015-02-27
