
视频交通流检测中的背景提取*
2011-09-06 01:19唐佳林王镇波陈华春
山西电子技术 2011年4期
唐佳林,王镇波,陈华春
(1.北京理工大学珠海学院信息学院,广东珠海519085;
2.中山大学智能交通研究中心,广东广州 510006)
0 引言
视频图像的运动目标检测是计算机视觉领域的一个重要研究课题,尤其是近年来,智能交通领域的相关研究成为热点。在视频交通流所采集到的图像序列中,把感兴趣的部分如运动车辆、行人等,称之为前景,其它的则称为背景。如果能准确提取到背景图像,然后通过图像相减,就能得到前景图像即运动目标。但在实际中要想提取一幅完全“纯净”的背景图像是很困难的,而且由于光线、天气等外界因素的影响,背景也会随之变化。
目前国内外研究的自适应背景提取算法主要分为两类:非模型法和模型法[1]。前者是按照一定的假设规则,从过去的一组观测图像中选择像素灰度构成当前的背景图像,其中关键在于规则的设定。后者是对图像的每一个像素点分别建立对应的背景模型,以提取背景图像,并采用自适应方法对模型参数进行调整以实时更新背景图像[2-3]。与非模型法相比,模型法更能准确地提取背景,且对环境变化适应性强。但是由于需要对每一个像素点进行建模,计算复杂度较高,在实时性要求较高的交流检测中的应用受到限制。
本文对几种常用的非模型法提取背景进行分析和比较。其中包括:多帧平均法、直方图统计法、中值滤波法和背景学习法等,并在实时交通场景下对它们进行测试。
1 几种常用背景提取算法
1.1 多帧平均法
多帧平均算法的原理是将车辆看作噪声,用累加平均的方法消除噪声,从而可以利用车辆运行一段时间的序列图像进行平均得到道路的背景图像。用公式表示为:

式中Backgroud表示背景图像,N表示平均帧数,imagei表示第i帧序列图像。(x,y)为当前正在处理的像素点,通过改变x和y的值,即可获得整幅背景图像。
多帧平均算法假定,在一段时间内,背景出现的频率较高,比重远大于车辆前景的出现。随着平均帧数的增加对于背景的可靠度有着较大的保证,即平均的帧数多则越接近期望的背景效果。同时也出现了在车流量较大的情况下使用该算法会将车辆的信息误认为是背景,因此用简单的多帧平均算法显然不能够满足复杂环境的需要。
1.2 统计直方图法
直方图分析方法是通过存储视频中每一像素位置在序列的时间轴方向上的直方图信息(即在某一时间段内统计该像素位置处每一种可能的像素值所出现的次数),取该像素位置的直方图峰值所对应的像素值作为背景像素值[4]。
直方图统计用公式表示为:
公式(2)是统计像素点(x,y)的直方图函数,其中:P(x,y,k)表示像素点(x,y)处亮度值为k出现的次数,imagei(x,y)表示第i帧图像像素点(x,y)处灰度值,N表示参与统计的总视频帧数,N取得越多,获取的视频背景图像越精确。式(3)表示该像素点在时间序列上灰度值出现频率最大时为该像素点的背景灰度值。
直方图分析方法假定,背景出现的频率最高,车辆前景重复出现频率远低于背景的出现。满足这一条件时,此方法可得到极理想的背景。当出现临时停车等现象时,这一方法将不适用,同时,此方法需要对在每一图像点建立大矩阵以存储多种亮度值的出现次数,既消耗运行时间又浪费内存空间,难以满足实时的背景更新需求。
1.3 中值滤波法
统计中值法是一种基于排序理论的,能有效抑制噪声的非线性信号处理技术。它主要用于对实值离散信号的滤波,可以在最小绝对误差条件下,给出信号的最佳估计。统计中值法的优点是它可以克服线性滤波器如均值滤波给图像带来的模糊影响,做到在有效地清除脉冲噪声的同时,保持良好的边缘特性,从而获得较满意的复原效果。
空间域的中值滤波基本思想是把数字图像或数字序列中一个像素点的值,用其邻域中各像素点值的中值替代。其定义为:对一维序列X1,X2,…,Xn,把n个数据按大小排列为:Xi1,Xi2,…,Xin,则:

在处理视频图像提取静止背景的实际应用中,需要操作的是时间域的中值滤波,邻域一般取长度L=2n+l的子图,n为正整数。将子图在数据上滑动,中值滤波输出的为子图内各像素的中值所替换的子图中心像素,即:

式(5)中,背景图像像素点(x,y)的灰度值为Background(x,y),视频序列中第i帧图像在像素点(x,y)处的灰度值为Xi(x,y)。
统计中值法假定,在一段时间内,背景的出现概率超过50%,满足这一条件时可获得完整的背景。这一方法需要存储一定量的图像帧,并且需要进行排序操作,耗时较长。
1.4 背景学习法
背景学习法的思想是首先找到图像的运动目标区域和非运动目标区域,然后对两种区域做不同的处理[5]。非运动目标区域的背景利用公式进行迭代更新,而运动目标区域的背景则保持不变。该算法具体步骤如下:
Step1初始化背景图像Bi=I0;
Step2利用帧间差分图像找出运动目标区域和非运动目标区域:

Step3对两种不同区域做相应的处理:

当差分二值化图像Di(x,y)=1时背景Bi(x,y)保持不变,而当Di(x,y)=0时,利用公式(1-α)Bi(x,y)+αIi(x,y)更新背景,其中α为更新系数。
Step4迭代更新,重复Step2和Step3,直到满足停止迭代条件。最后得出的Bi就是算法更新得出的背景图像。
背景更新的速度快慢取决于系数α。α取值过大时,该算法更新背景速度快,同时能适应快速变化的复杂环境,但是也会引入更多的噪声。α取值过小时,背景更新的速度下降,相对稳定,但背景图像不能及时反映场景瞬时变化。
2 实验结果分析
图1所示是从视频中截取的一张实时图片,该视频采集于广州市新港西路,该场景下车流量相对较大。
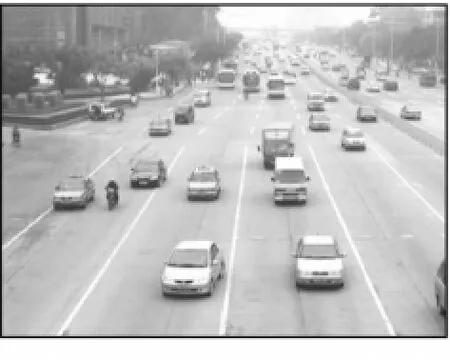
图1 原复杂场景视频截图
图2中(a)图是采用多帧平均法进行背景提取,(b)图采用统计直方图法进行图像背景提取,(c)图是利用统计中值法进行图像背景提取,(d)图是采用背景学习法进行图像背景提取。图中,由于停在巴士站的公交车停留时间较长,在进行背景提取的时间段内没有运动,所以被误认为是静止的背景。前三幅背景提取结果图,效果基本差不多;但是在远处,也就是运动车辆密度较大的路面上,中值滤波法提取的路面较清晰,而多帧平均法和直方图统计法都存在一定程度的模糊。(d)图中,由于选取的参数α较大,背景更新的速度较快,运动车辆会留下一定的痕迹,而且随着α取值越大,这种误差也越大。
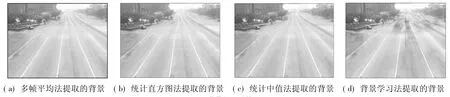
图2 背景提取后效果图
从处理速度来看,背景学习法由于只需要处理当前帧图像和原背景帧图像,算法复杂度低,处理速度非常快;在背景提取和学习的过程中,背景提取的结果可以实时地应用到后续运动目标检测中。多帧平均法和直方图统计法,都需要对时间序列的多帧图像进行加法和比较操作,算法复杂度和处理速度适中。而中值滤波法需要对时间序列上的每一帧图像进行排序操作,算法较复杂,处理速度也较慢;而且随着所选时间序列图片的增加,运算复杂度直线上升。
3 结论
针对视频交通流检测实时性要求较高的特点,本文总结了几种常用的非模型背景提取方法,并对它们做了分析和测试。从提取效果来看,中值滤波法最佳,灰度直方图和多帧平均法次之,背景学习法较差;只要调整好学习强度参数,也能取得不错的效果。背景学习法的处理速度最快,而且在背景学习的过程中,也能作为背景图像进行后续的运动目标检测;这使该方法实时更新背景变得更容易,得到的背景能随着环境的变化而变化,应用也较广泛。
[1]杨珺,史忠科.基于改进单高斯模型法的交通背景提取[J].光子学报,2009,38(5):1293-1296.
[2]Zoran ZIVKOVIC,Ferdinand VAN DER HEIJDEN.Recursive Unsupervised Learning of Finite Mixture Models[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2004,26(5):651-656.
[3]侯志强,韩崇昭.基于像素灰度归类的背景重构算法[J].软件学报,2005,16(9):1568-1576.
[4]Long W,Yang Y.Stationary Background Generation:Analternative to the Difference of Two Images[J].Pattern Recognition,1990,23(12):1351-1359.
[5]肖梅,韩崇昭.一种视频序列的背景提取算法[J].光电工程,2005,32(4):78-81.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
北京航空航天大学学报(2022年6期)2022-07-02
高技术通讯(2021年3期)2021-06-09
现代电子技术(2021年1期)2021-01-17
摄影之友(影像视觉)(2018年12期)2019-01-28
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
自动化学报(2017年5期)2017-05-14
自动化学报(2017年11期)2017-04-04
初中生世界·八年级(2017年3期)2017-03-24
