合肥新桥机场吊运施工时变分析软件的研制
2011-09-03 06:24江小燕王建国完海鹰
合肥工业大学学报(自然科学版) 2011年12期
江小燕, 王建国, 完海鹰
(合肥工业大学 土木与水利工程学院,安徽 合肥 230009)
0 引 言
大跨度结构由于构件体积庞大,在施工吊运过程中不仅要考虑吊运结构本身受力状态,同时需要考虑周围施工环境,避免结构或构件间的碰撞,需要操作方便、三维显示功能强大的专业软件来模拟实时施工场景以满足施工的需要。目前该类施工仿真常采用通用软件(如Ansys、Etabs、Abaqus等)或对通用软件进行二次开发来完成。
对于大跨度结构施工控制中的结构分析,由于计算模型随施工过程而改变,同时要求对施工过程进行跟踪分析,采用常规通用软件来分析均有不同程度的困难。例如,采用Etabs不能直接模拟起拱后构件的位置[1],采用Ansys分析也不能针对施工过程进行实时动态跟踪。
本文以合肥新桥机场为实际工程背景,编制了同时具有施工控制跟踪和仿真分析功能的软件,并详述了如何通过软件对本工程的施工过程进行虚拟仿真模拟,以及如何对方案的选择进行指导,以保证施工的安全和顺利进行。
本文以 Coin3dOpen Inventor[2]开源图形开发包作为软件图形显示模块的主要工具,利用Open Inventor提供的SoTransformManip操控器类和SoDataSensor数据传感器类等模块,编写吊运操控器;利用数据传感器将动态数据传到So DataSensor,再通过SoDataSensor回调函数编制软件,按照时变力学理论对结构进行计算分析。
1 软件基本原理和功能
软件的基本原理是利用图形操控器模拟结构的刚体运动(旋转、平移),利用传感器和引擎共同工作来模拟结构的机构联系,利用回调函数实时提供结构状态数据,最后利用这些状态数据可以按照时变力学理论对结构进行内力计算分析,从而完成整个吊运操作模拟、实时内力分析、实时强度复核等吊运时变分析全部工作[3-4]。这是一般通用有限元程序不能完成的工作,也体现了本文软件的优越性。利用Open Inventor提供的引擎完成的机械运动如图1所示。
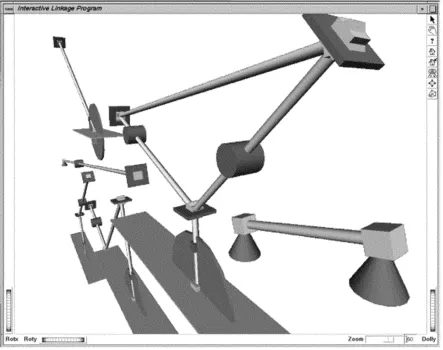
图1 利用Open Inventor提供的引擎完成的机械运动
软件的功能设计如下所述。
图形显示:拉索显示,结构图形显示,内力显示,图形缩放、旋转、平移查看。
图形操作:结构、拉索选择,结构、拉索移动,结构旋转,操作数据保存。
数据管理:结构几何、截面参数、材料输入,吊运路径设置,结构数据保存。
内力分析:指定状态结构静态分析,吊运全过程时变分析,结构制动力分析。
2 吊运施工过程的几何分析
吊运施工过程中结构的几何状态改变过程由一系列动作完成,每次动作可以表述为一个转换矩阵A,假设几何状态为P=(X,Y,Z),其第n次几何变换后的最终状态Pn可以描述为:
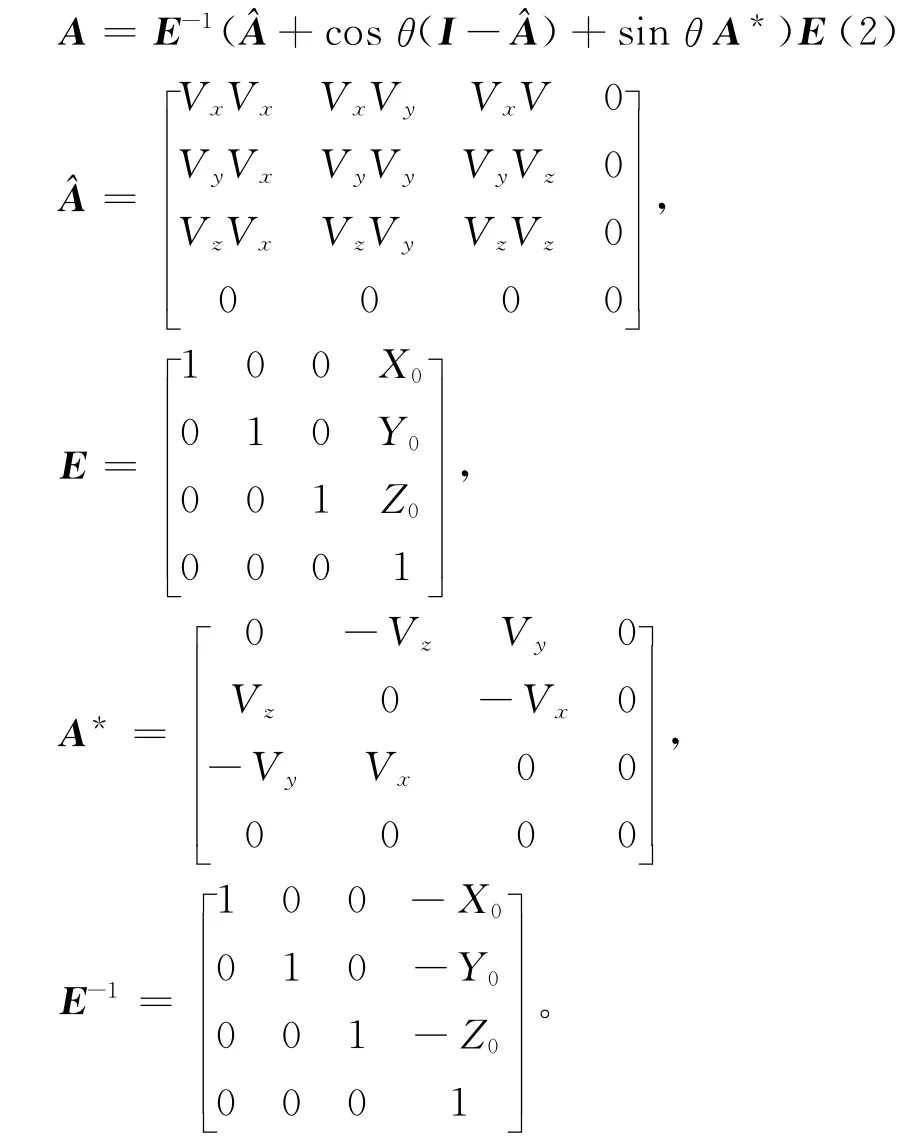
则绕任意旋转轴(轴心坐标(X0,Y0,Z0),轴线方向(Vx,Vy,Vz)),旋转角度为θ时,变换矩阵A 表达式为:
施工过程为了避免破坏结构,应避免构件与工作环境中结构碰撞,结构之间最短距离d应满足以下要求:

其中,[d]为容许安全距离。

其中,dPP为两点之间距离;dPL为点与直线之间距离;dPS为点与面之间距离;dLL为线与线之间距离;dLS为线与面之间距离;dSS为面与面之间距离。
以上计算公式仅描述静止状态下结构状态,吊运过程中还需要考虑吊运速度和加速度,当初始速度为,加速度为,在时间Δt内,几何状态Pn变换到最终状态Pn+1时,Pn+1为:

计算分析中将结构吊运路径参数在时间轴上进行离散,计算每个时间点的结构几何参数、荷载情况,分析每个位置的内力情况、结构内力的包络值,最终验证结构强度和稳定性,确保吊运的安全。
3 施工过程的时变力学分析
吊运施工过程中结构同时有刚体运动和弹性变形,传统的有限元分析手段不能分析具有刚体运动的结构,因此本文软件采用多柔体动力学理论[5-6]进行分析。
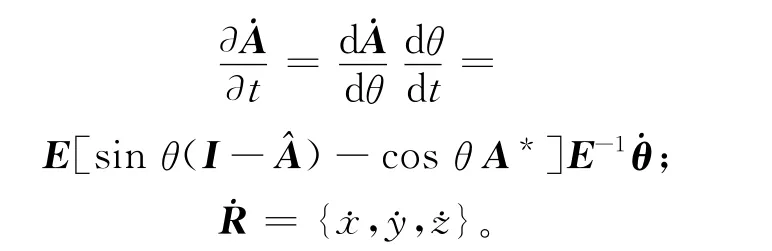
结构在吊装过程中存在平移、旋转运动,结构内部的绝对运动是结构本身变形和结构做刚体运动的矢量和,由(2)式可得结构上任意点速度˙u为:

其中
根据Hamilton定律,动力系统满足(6)式:
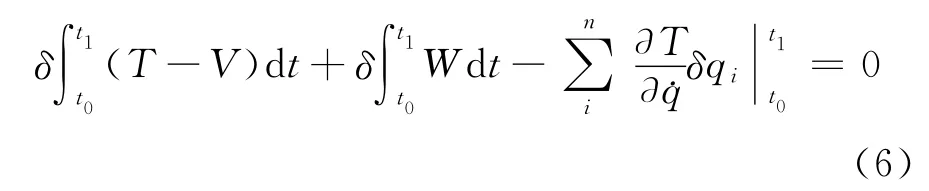
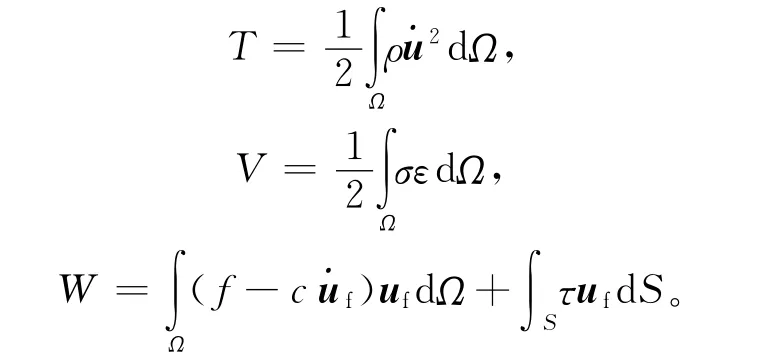
其中,T、V、W 分别为结构总动能、结构应变能和外力做功,而且有:
利用Hermite插值多项式对弹性变形uf、外力F在时间域(nΔt,(n+1)Δt)上进行插值:
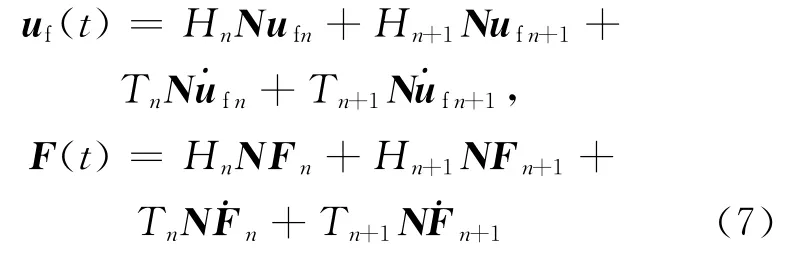
其中,N为空间域结构形函数;
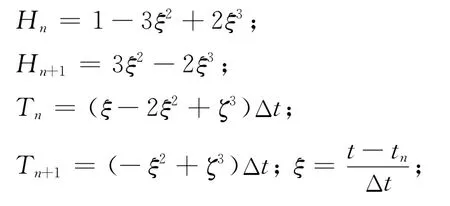
Δt为时间步长。
如果初始状态ufn已知,则变形uf对时间的变分为:
将(6)~ (8)式代入 (2)式并利用 δufn+1、的任意性整理得:
B为应变矩阵;D为弹性矩阵。
根据(9)式,在已知ufn、˙ufn的情况下,可以递推求解未知 量ufn+1、˙ufn+1,利用单元矩阵可以分析n阶段单元的内力。
4 软件成果
本文在以上设计的框架上开发了相应的软件,软件可以显示复杂的结构,可以在界面中通过操作器对结构状态进行旋转和平移操作,软件记录操作的动作,并形成一系列命令。吊运分析软件实时显示如图2所示。
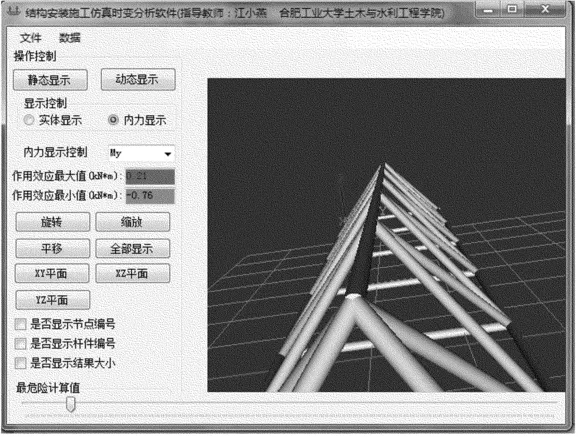
图2 吊运分析软件实时显示图
考虑施工软件交互性强的特点,软件提供实时操作、分析、验算功能,用户可以事先输入吊运路径,也可以通过图形操作方式获得吊运路径,并实时按照当前结构空间状态用静力方法计算当前状态的结构内力,软件自动根据多柔体动力学理论连续分析结构的内力,并形成结构的内力包络值,最终核算结构的强度和稳定性[7-8]。
本文软件是为吊运施工过程研发的专用软件。目前分析此类问题一般借助有限元分析软件,常规有限元分析软件采用状态冻结方法进行拟静态分析[9],不能完全反应结构动力特性,并且手工调整几何状态,手工分析内力包络值;而本文软件在吊运分析时考虑刚体运动和弹性变形耦合,对几何状态可以自动离散,对内力包络值可以自动统计,在可靠性计算效率上要优于传统分析软件。
5 工程应用
合肥新桥国际机场航站楼总建筑面积为11.2×104m2,为一在建新机场。航站楼横向长约804m,纵向最大宽度约161m,建筑最大高度约30m。
结构分为5个区段,以3区段为中轴线向两边呈对称布置,1、5区结构由钢管柱、楼面框架梁、屋盖刚架、屋面檩条及幕墙立面结构5部分组成,最大高度约20m,刚架柱距10.893m,刚架最大跨度约34m。
本文主要对1区实腹门式刚架施工过程进行研究,实腹门式刚架分段图如图3所示,分段①吊装过程如图4所示,各种状态下构件局部坐标轴方向矢量见表1所列。
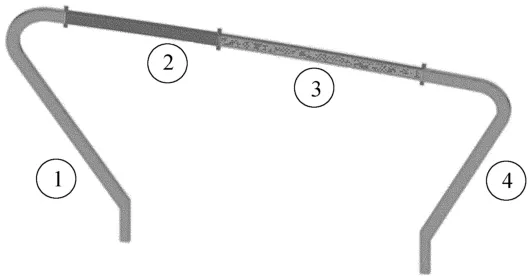
图3 吊装分段图

图4 分段①连续吊装过程弯矩图
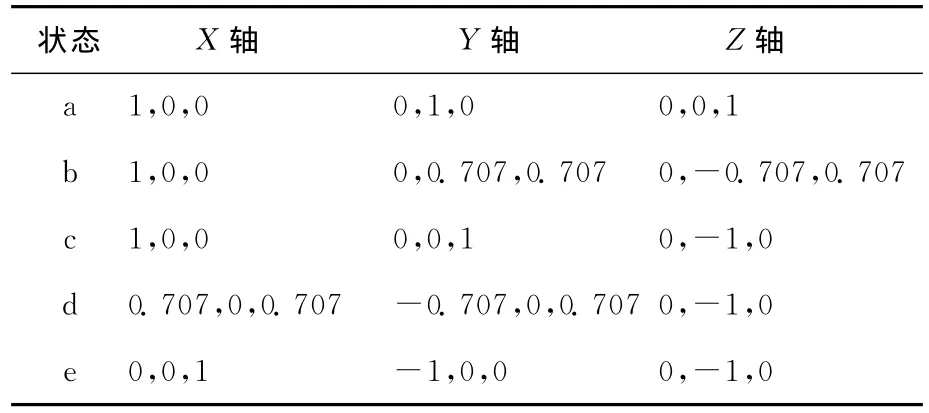
表1 各种状态下构件局部坐标轴方向矢量
6 结束语
本文针对施工吊运的特点结合Coin3dOpen Inventor的显示功能强大、易于学习、代码开源的优势开发了专用的施工分析软件,软件在合肥新桥国际机场航站楼施工仿真过程得到应用,对主要构件的吊装施工起到了指导作用,保证了机场钢结构的吊运施工安全。
[1]杨 扬,完海鹰,李庆峰,等.合肥新机场实腹式刚架钢结构的施工仿真分析 [J].合肥工业大学学报:自然科学版,2011,34(6):866-869.
[2]Wernecke J.The inventor mentor [M].Addison-Wesley Professional,1994:38-96.
[3]唐荣锡,汪嘉业,彭群生.计算机图形学算法基础 [M].北京:科学出版社,2000:5-130.
[4]金小刚,彭 群.计算机动画算法基础[M].北京:科学出版社,2000:13-78.
[5]曹志远.土木工程分析的施工力学与时变力学基础[J].土木工程学报,2011,34(3):41-46.
[6]常志国.索杆梁钢结构施工动力学的理论与仿真研究[D].上海:同济大学,2006.
[7]鲍广鉴,曾 强,陈柏全.复杂空间钢结构施工过程的计算机仿真技术[J].施工技术,2005,34(10):15-17.
[8]郑亚文.虚拟仿真技术在建筑施工中的应用研究[J].施工技术,2009,38(12):114-117.
[9]张希黔,石 毅.上海正大广场钢结构吊装施工方案虚拟仿真系统[J].施工技术,2000,29(8):9-11.
猜你喜欢
军事文摘(2022年19期)2022-10-18
中国生殖健康(2020年8期)2021-01-18
城市道桥与防洪(2019年5期)2019-06-26
山东冶金(2019年2期)2019-05-11
橡塑技术与装备(2018年21期)2018-11-13
中国生殖健康(2018年3期)2018-11-06
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27
广东石油化工学院学报(2016年6期)2016-05-17
地理教学(2015年19期)2016-01-06