
数字技术在创伤骨科的应用临床数字骨科(一)
2011-08-07 12:44尹庆水王新宇
中国骨科临床与基础研究杂志 2011年2期
章 莹,尹庆水,万 磊,王新宇
近年来,数字技术的飞速发展为骨科疾病的临床诊疗和基础研究提供新的手段,其与传统骨科互相融合、互相促进、互相影响,逐渐形成具有时代特征的现代数字骨科。目前应用于骨科的数字技术主要包括医学影像处理与三维建模技术、三维虚拟仿真与可视化技术、临床计算机辅助设计/计算机辅助制造(computer assisted design/computer assisted manufacturing,CAD/CAM)技术、有限元技术、手术导航与机器人辅助技术、人体骨肌系统力学仿真技术等[1-2]。作为骨科的一大分支,创伤骨科具有与脊柱外科、关节外科等专业不同的特点,数字技术在创伤骨科的应用也日趋广泛。现将创伤骨科领域运用的主要数字技术介绍如下。
1 术前骨折的影像处理和三维建模技术
该技术即是在骨折手术前通过Mimics等三维操控软件系统,利用患者的影像学数据在计算机中建立相应的骨关节三维模型。
在骨折的传统诊疗过程中,手术复位及固定的参考标准主要包括术前X线片、CT扫描图像以及术中透视结果等。但对于复杂粉碎性骨折而言,建立骨关节CT三维重建模型可以使术者在术前即对骨折、特别是复杂骨折形成一个立体概念;掌握骨折的全面和细节情况,并在此基础上作出准确判断;为骨折治疗方案的选择提供清晰可靠的依据,从而使术者在进行手术设计时更大限度地提高复位和固定效果,保护骨折部位的血运,改善手术效果;同时还便于患者及其家属对病情的理解,提高宣教效果。具体到各部分骨折,骨盆髋臼骨折的情况往往比较复杂。对于严重的不稳定性骨盆骨折,正确的诊断分型是确定治疗方案的关键[3]。以往通常借助拍摄髂骨斜位及闭孔斜位X线片的检查方法来判断臼壁的骨折情况,目前CT扫描已成为首选的检查方法[4]。采用计算机三维建模技术可以直观地展示骨盆髋臼骨折的实际情况,为复杂骨折的准确诊断和精确治疗提供很好的参考依据(图1)。对肱骨、胫骨等四肢复杂性骨折而言,CT三维重建模型的建立无疑更为全面和清晰(图2),更加有助于术者对骨折部位解剖结构、骨折位置及骨折类型的准确理解。
在Mimics软件中,独立的可操控三维实体即为Object,术前对于重要的骨折块或骨单元均应建立Object,以便在模拟手术中进行操作,我们称之为建立单元(简称建元)。在各部位骨折中,涉及关节面的骨折块是最重要的,只要涉及关节面且面积>0.5 cm2,都应单独建元。因此,对骨折的三维重建应由熟悉软件性能的技术人员执行,并注意仔细观察,不可遗漏重要的碎小骨块。具体到股骨髁上骨折及胫骨平台骨折,这类骨折多由高能量损伤所致,往往有多块涉及关节面的骨折块,常同时伴有关节面的塌陷,治疗目的主要是恢复膝关节功能[5-7]。在进行三维重建时,对以上相关的骨折块应注意单独建元分析,特别是塌陷的关节面部分应尽量单独建元,以便在CAD时可以进行撬拔复位模拟。对于后踝骨折,长期以来有观念认为,如果负重面<25%,则骨折对胫距关节的生物力学特性影响甚微,可以不予手术复位固定[8]。近年来有学者经过长期随访研究,认为当骨折块关节面≥胫骨远端关节面的10%时,需行切开复位固定,否则将改变关节内原有的接触应力,增加创伤性关节炎的发生率[9-10]。因此在进行三维重建时,对于明确的后踝骨折均应予以建元(图3)。此外,踝关节骨折常合并下胫腓关节损伤[11],对分离明显需手术固定者,胫腓骨远端需分别建元。跟骨形状不规则,且主要由松质骨组成,该部位骨折常形成数量众多的小碎骨块,并伴松质骨压缩,三维重建难度较高(图4)。而在跟骨三维重建时同时扫描对侧跟骨,以对侧数据作为镜像参考[12-14](图5),可有助于上述问题的解决。

图1 骨盆骨折三维重建效果

图2 肱骨近端骨折三维重建效果

图3 踝关节骨折三维重建效果

图4 跟骨骨折三维重建

图5 双侧跟骨三维重建效果
2 术前计算机模拟手术技术
术前骨折三维模型建立后,软件允许我们在建立的模型上进行模拟测量、复位、固定等操作。在进行CAD手术模拟时,应按照预定的手术入路,将三维模型旋转至适当的角度,然后在建立的骨折模型上进行虚拟复位操作。受显露条件的限制,术中骨折复位可能比模拟情况困难(特别是髋臼和骶骨骨折),这一点在手术模拟时应予以考虑。此外,还应考虑切口方向、软组织阻挡以及神经血管保护等问题。例如在肱骨近端骨折,由于肱骨头血运主要来自旋肱前动脉的前外侧支[15],因此模拟手术操作应尽量选在前外侧,以尽量减少实际手术后肱骨头缺血坏死的风险。肘关节骨折的手术入路常取后侧或外侧切口,应注意桡神经的走行情况并予以保护。股骨髁上骨折可进行复位、固定等模拟手术,粉碎性股骨髁上骨折如伴有短缩及成角畸形,可同时进行模拟纠正。胫骨平台塌陷在此时亦可实施撬拔复位并植骨的模拟手术(图6),并可预计植骨量和固定范围。跟骨骨折则可进行模拟撬拨复位塌陷松质骨,恢复Böhler角,保持距下关节的平整,矫正跟骨长度、宽度和高度等手术过程[16]。考虑塌陷较大、有植骨可能时,可同时计算植骨量。另有研究表明,跟骨内侧的载距突在几乎所有跟骨骨折中都没有移位[17],而外侧入路可以较清楚地显示距下关节及跟骰关节,也更有利于复位[18],因此外侧入路是跟骨折手术模拟时经常选择的手术入路(图7)。

图6 胫骨平台骨折模拟复位三维效果
3 人体骨骼快速成型(rapid prototyping,RP)技术
RP技术是国外20世纪80年代后期发展起来的一门新兴技术,是由CAD模型直接驱动的快速制造任意复杂形状三维物理实体的技术总称。在骨科学领域,其与逆向工程技术、人体骨骼解剖学相结合,基于离散-堆积成型原理,在计算机控制下生成实物的三维CAD模型,用于指导手术和模拟手术。具体步骤是:将骨折部位的CT扫描数据经软件转换格式后直接输入RP机,即可生成手术部位骨骼的实体三维模型。
该技术有助于术者在术前更加形象地认识患者骨骼结构的空间特征,准确诊断复杂性骨折,预先确定植入物的各类型号,明确手术方案设计以及评价术后生物力学稳定性等;也有助于在术中进行实体比对,提供实时参考。在肱骨近端骨折中,螺钉需要深达软骨下骨时方可获得最大稳定性[19],我们可在模拟过程及RP模型上进行实物测量,了解肱骨头的径向尺寸大小,从而在实际手术时选择理想长度的螺钉。在肘部和腕部骨折中,通过测量骨折块的实际大小,可以预计固定效果并制定最佳的固定方案。在复杂骨盆骨折手术中,精确的实体模型不仅直观展示骨折部位的实际情况,还可结合DSA数据来显示髂血管的位置及其与骨折部位的关系,为进一步增强手术安全性提供重要的依据。对于复杂的股骨髁上、胫骨平台及踝关节骨折,利用RP技术制作实体模型(图8),还可以了解关节面破坏的直观情况,对手术入路及切口长度的选择、术中风险的评估及手术效果的预后提供参考。跟骨形状不规则,术中进行内固定物的选择和塑形将导致手术时间的延长,而传统C型臂X线机引导下的内固定物置入其不合理安置率可高达39%[20]。在实体模型上进行长度测量及内固定物的模拟塑形,不仅可以明显缩短手术时间,而且还能大大提高内固定物的贴合率,在实践中取得良好效果。此外,通过实体模型还可更加明确地了解跟骨关节面的破坏程度及跟骨塌陷程度,从而决定手术入路、复位手法、固定方案及植骨选择等。
4 计算机辅助制造(computer aided manufacturing,CAM)技术
CAM技术是根据计算机产生的CAD结果生成CAM数控加工指令,利用计算机来进行个性化假体制造的技术。目前该技术广泛应用于骨科器械的研发和设计过程中,尤其是个体化手术模板及内固定器材的制作、手术钢板的设计改良及手术方法改进等。例如,广州军区广州总医院成功开展的股骨颈骨折置钉模板(图9),就是通过CAM技术制作手术模板,消毒后将其直接用于手术操作(图10),临床效果显著。在假体工程方面,目前可通过技术含量更高的RP机床及质量更好、精度更高的模型打印将植入材料(人工骨、金属植入体等)直接三维成型,从而展开实物模拟手术以及精确假体植入、植骨以及内固定等手术操作。此外,CAM技术还常用于仿生制造与假体工程,通过RP技术制作人工骨骼,微孔的数量、大小、分布及形状均可人工控制。这种人工骨骼不仅与被代替的骨骼在形状上基本保持一致,而且还具有极好的生物相容性和生物可降解性,在体内可逐步被再生骨骼组织所替代。

图7 跟骨骨折模拟复位效果

图8 踝关节骨折RP模型

图9 股骨颈骨折置钉模板

图10 术中应用股骨颈骨折置钉模板打入导针
5 生物力学计算——有限元技术
有限元技术指利用计算机技术,把复杂、不规则的力学分析对象离散化,形成有限个几何单元体,进行分解计算的一种生物力学分析方法。在创伤骨科,可以对任意正常或损伤的骨骼或神经血管、肌腱等软组织利用CT、MR扫描图像在软件中建模、划分网格并赋值,通过模拟不同的力学状态计算测量其应力、应变或位移变化趋势(图11~14),从而分析受伤机制,比较各种手术方式、内固定器械的稳定性,为临床创伤的治疗提供生物力学基础和理论依据[21-22]。为骨折的规范化分型、治疗提供强有力的保障。
6 计算机辅助导航(computer assisted navigation system,CANs)技术
CANs是指利用空间定位技术确定手术部位的组织结构坐标,并精确跟踪手术器械位置变化的计算机手术辅助系统(图15)。该技术通过屏幕在术中实时显示手术器械的位置以及与患者解剖结构的关系,从而避开重要的解剖结构,确保手术的安全;它还可以模拟手术器械的前进和后退,测量植入物的角度、长度及直径等。目前CANs已成功用于骶髂关节螺钉置入、髓内钉置入等创伤骨科手术[23-25],不仅可以进行精确定位和准确引导,还帮助术者经过小切口将手术器械送入人体,进行微创诊断或治疗,手术变得更加快捷、安全、可靠,减轻了病人的痛苦,降低了手术的难度。
7 机器人辅助手术技术
医生通过操纵计算机,使医用机械臂在影像/光学设备监测下进行微细手术,这就是机器人辅助手术(图16)。术者进行手术时手眼间协调性和触觉的差异、手的不自主震颤等会影响手术的精度,手术机器人系统可以很好地克服上述问题。目前医用手术导航机械臂已成功应用于关节腔镜闭合髓内钉置入、经皮骶髂关节螺钉置入、髋螺钉置入等创伤骨科手术[26-27],具有手术操作可视化、手术视野广泛以及能在虚拟环境下模拟手术并制定手术方案的优点,极大提高了手术的精确性和安全性。
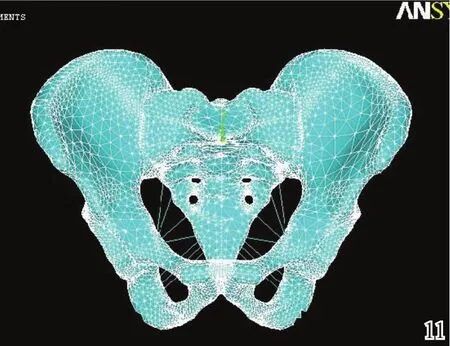
图11 正常骨盆有限元模型

图12 骶髂关节前路钢板固定所有钢板和螺钉的有限元模型

图13 正常骨盆施加500 N垂直载荷后位移分布
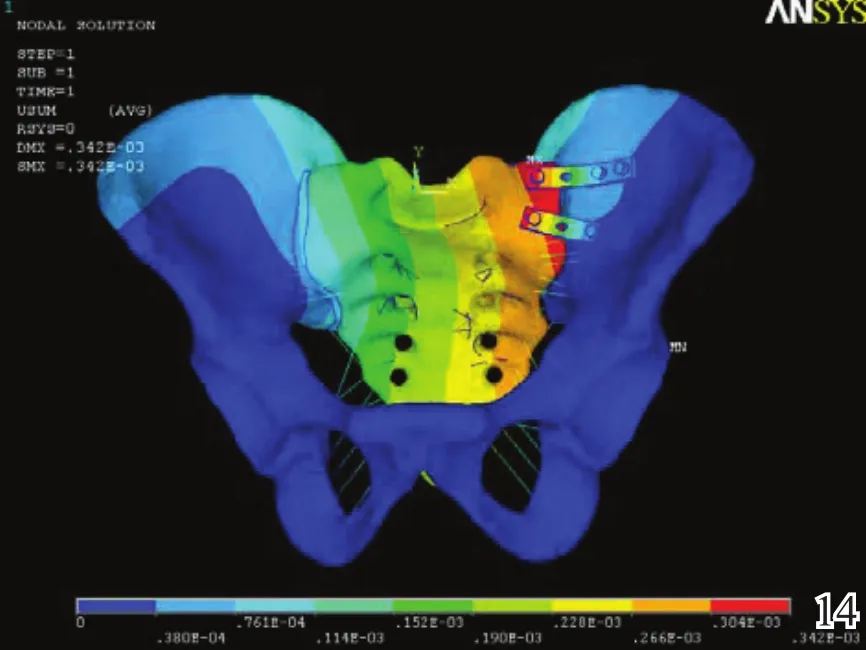
图14一侧骶髂关节脱位行前路钢板固定后的位移分布
8 典型病例
8.1 典型病例1:胫骨平台粉碎性骨折
中年男性患者,术前X线片示左侧胫骨平台粉碎性骨折(图17A),为高能量损伤所致骨折,骨折粉碎及移位程度严重,手术难度较大。入院后即对患者进行左膝关节CT扫描,将扫描数据刻录光盘后以Mimics软件读取并进行三维重建(初始三维重建效果如图17B所示)。在三维重建模型中可以看到,此例胫骨平台骨折有3个主要骨折块,分别为胫骨内髁前部、内髁后部及外髁。内侧塌陷比较明显,关节面多处破坏。为达到虚拟复位应力学分析的目的,我们对胫骨平台部位主要骨折块分别进行建元分析(图17C)。对各骨折块及实体骨结构建元后进一步行虚拟复位操作,模拟内外侧双切口分别复位内外髁骨折块(图17D)。虚拟复位过程证实,可以通过内外侧双切口达到主要骨折块的复位,并从两侧分别以胫骨近端解剖形状钢板进行固定。具体操作过程:先作外侧切口,将外髁骨折块复位并固定后,再作内侧切口复位内髁骨块,将其撬起复位即可,无需植骨,复位后能恢复关节面的相对平整。同时对复位后胫骨平台的宽度及前后径进行测量并记录,以备术后为使用镙钉长度的确定提供参考(图17D)。虚拟复位完成后,将骨折数据输入RP机,制作实体RP模型(图17E)。术前将实体模型随手术器械一同进行高温高压消毒,在手术台上进行实体比对,提供手术操作参考。手术过程顺利,因术前对手术方案进行充分设计,对骨折的形态和特点有较全面和直观的认识,手术时间大为缩短。术中基本按照术前设计方案,采用外侧切口固定外髁骨折后再作稍偏后方的内侧切口,先复位前侧的内髁骨折块,后撬拨复位后方的骨折块,自前外侧向后内侧骨块打入拉力镙钉进行固定,取得满意效果(图17F)。

图15 手术导航系统

图16 机械臂与机器人辅助手术

图17 左侧胫骨平台粉碎性骨折图片

图17 E制作RP模型

图18 右侧踝关节骨折手术前后图片
8.2 典型病例2:踝关节骨折
中年女性患者,术前右踝关节X线片示右三踝粉碎性骨折(图18A),骨折情况复杂,移位严重,手术复位难度较大。入院后行右踝关节CT扫描(图18B),将扫描数据刻入光盘,以Mimics软件读取,进行右踝关节骨折三维重建并制作实体RP模型(图18C~18D),指导手术复位。三维重建模型显示外踝粉碎性骨折,有3个主要骨折块,内踝骨折向外侧移位并涉及胫骨远端;后踝主要有2个骨折块,同时存在纵行劈裂(图18C)。根据骨折类型,术前决定先行外踝骨折复位固定,蝶形骨折块用拉力螺钉自前向后固定,内侧选用合适苜蓿叶钢板固定胫骨远端及内踝,内踝尖端可用拉力螺钉加强固定效果,后踝骨折块复位后可用拉力螺钉自前向后拧入固定。在RP模型上预置选用钢板,使其贴附良好(图18E)。术中按计划进行复位及固定,术程顺利,骨折复位固定满意。术后第3天复查X线片,示内固定位置良好,骨折对位对线好,效果满意(图18F)。
[1]尹庆水,万磊.数字骨科——信息化世纪的新骨科:数字骨科入门一[J].中国骨科与基础研究杂志,2009,1(1):77-78.
[2]王成焘,白雪岭.骨相关外科中的数字技术[J].中华创伤骨科杂志,2008,10(2):103-108.
[3]刘朝阳,汤龙飞,徐毅,等.不稳定骨盆骨折的手术治疗[J].中国中医骨伤科杂志,2009,17(10):53-54.
[4]张金玲,陈鹏,赵德利,等.64层螺旋CT三维重组技术在骨盆骨折诊断中的应用[J].临床放射学杂志,2009,28(3):380-383.
[5]万磊,尹庆水,章莹,等.计算机虚拟健侧镜像辅助复原复杂跟骨骨折[J].中国组织工程研究与临床康复,2008,12(48):9443-9446.
[6]章莹,夏远军,万磊,等.计算机三维仿真技术在复杂跟骨骨折手术中的应用[J].中国修复与重建外科杂志,2009,23(12):1447-1450.
[7]章莹,夏远军,万磊,等.计算机三维仿真技术在复杂足踝部骨折手术中的应用[J].中国骨科临床与基础研究杂志,2010,2(2):98-101.
[8]涂万荣,莫树喜,丁援建.股骨髁上骨折的内固定治疗[J].中国骨与关节损伤杂志,2006,21(4):306-307.
[9]Neer CS.Displaced proximal humeral fracture I:classification and evalution[J].J Bone Joint Surg Am,1970,52(6):1077-1089.
[10]章莹,夏远军,万磊,等.计算机三维仿真技术与常规手术治疗胫骨平台骨折的疗效对比分析[J].中国骨与关节损伤杂志,2010,25(8):686-688.
[11]Katioz H,Bombaci H,Gorgec M.Treatment of trimalleolar fractures:is osteosynthesis needed in posterior malleolar fractures measuring less than 25%of the joint surface? [J].Acta Orthop Traumastol Turc,2003,37(4):299-303.
[12]de-Vries JS,Wijgman AJ,Sierevelt IN,et al.long-term results of ankle fractures with a posterior malleolar fragment[J].Foot Ankle Surg,2005,44(3):211-217.
[13]章莹,万磊,尹庆水,等.计算机快速成型辅助个体化三踝骨折的手术治疗[J].中华创伤骨科杂志,2009,11(6):509-511.
[14]周路纲,王新,王磊,等.踝关节骨折合并下胫腓关节分离的诊治[J].中国矫形外科杂志,2009,17(8):631-632.
[15]郭世绂.临床骨科解剖学[M].天津:天津科学技术出版社,1988:370.
[16]陈滨,王刚,张晟,等.切开复位钢板内固定治疗跟骨骨折[J].实用骨科杂志,2009,15:13.
[17]Aldridge JM 3rd,Easley M,Nunley JA.Open Calcaneal fractures results of operative treatment[J].J Orthop Trauma,2004,18(1):7-11.
[18]Sanders R,Fortin P,DiPasquale T,et al.Operative treatment in 120 displaced intraarticular calcaneal fractures:results using a prognostic computed tomography scan classification[J].Clin Orthop Relet Res,1993,290:87-95.
[19]Liew AS,Johnson JA,Patterson SD,et al.Effect of screw placement on fixation in the humeral head[J].J Shoulder Glbow Surg,2000,9(5):423-426.
[20]Richter M,Geerling J,Zech S,et al.Intraoperative three dimensionalimaging with a motorized mobile C-arm(SIREMOBIL ISO-C-3D)in foot and ankle trauma care:a preliminary report[J].J Orthop Trauma,2005,19(4):259-266.
[21]Beaupre GS.Effectoffracture gap on stability of compression plate fixation:a finite element study[J].J Orthop Res,2011,29(1):152-153.
[22]Amin S,Kopperdhal DL,Melton LJ 3rd,et al.Association of hip strength estimates by finite-element analysis with fractures in women and men[J].J Bone Miner Res,2011,26(7):1593-1600.
[23]Kim KK,Heo YM,Won YY,et al.Navigation-assisted total knee arthroplasty forthe knee retaining femoralintramedullary nail,and distal femoral plate and screws[J].Clin Orthop Surg,2011,3(1):77-80.
[24]Ochs BG,Gonser C,Shiozawa T,et al.Computer-assisted periacetabularscrew placement:comparison ofdifferent fluoroscopy-based navigation procedures with conventional technique[J].Injury,2010,41(12):1297-1305.
[25]Leloup T,El-Kazzi W,Schuind F,et al.A novel technique for distal locking of intramedullary nail based on two nonconstrained fluoroscopic images and navigation[J].IEEE Trans Med Imaging,2008,27(9):1202-1212.
[26]Joung S,Kamon H,Liao H,et al.A robot assisted hip fracture reduction with a navigation system[J].Med Image Comput Comput Assist Interv,2008,11(2):501-508.
[27]Hung SS,Lee MY.Functional assessment of a surgical robot for reduction of lower limb fractures[J].Int J Med Robot.2010,6(4):413-421.
猜你喜欢
软件(2020年3期)2020-04-20
中国骨科临床与基础研究杂志(2017年1期)2017-04-20
腹腔镜外科杂志(2016年12期)2016-06-01
中国骨科临床与基础研究杂志(2016年6期)2016-03-11
中国卫生标准管理(2015年25期)2016-01-14
中外医疗(2015年11期)2016-01-04
转化医学电子杂志(2015年4期)2015-12-27
中国医疗美容(2015年1期)2015-07-12
中国当代医药(2015年17期)2015-03-01
