
浅析西安地铁2号线列车出入段作业
2011-07-30 07:01孙慧
铁道通信信号 2011年8期
孙 慧
*西安市地下铁道有限责任公司 工程师,710016 西安
西安地铁2号线信号系统包括正线信号系统和车辆段/停车场信号系统。正线信号系统采用具有完整功能的列车自动控制 (ATC),主要包括:列车自动防护 (ATP)、计算机联锁 (CBI)、列车自动运行 (ATO)和列车自动监控 (ATS)4个子系统;还有支持自动驾驶 (AM)、ATP防护人工驾驶 (ATPM)、点式ATP驾驶 (IATPM)、限制人工驾驶 (RM)、非限制人工驾驶 (NRM)和自动折返驾驶 (ATB)6种驾驶模式。车辆段/停车场信号系统采用DS6-K5B计算机联锁系统和TJWX-2006-hh微机监测系统,支持限制人工驾驶或非限制人工驾驶模式运行。正线信号系统和车辆段信号系统是相对独立的,为实现列车投入和退出商业运营的正常作业,在车辆段入段信号机外方的出、入段线上,分别设置了长约360 m的转换轨,在转换轨上装设了一系列的信号设备,车辆段信号与正线信号之间按照敌对照查的联锁关系来保证行车安全。
1 转换轨的轨旁信号设备布置及功能
列车从车辆段投入正线运营之前,需要在转换轨处建立车-地通信,进行轨道数据库版本校验、定位、筛选和轮径校准后,才能以ATPM驾驶模式正式投入运营。列车结束运营从正线回车辆段时,也需在转换轨处将驾驶模式转换为RM模式,才能回车辆段。为了完成上述功能,基于西安地铁2号线现有的土建条件,对转换轨轨旁信号设备进行了布置,详见图1。下面就出段线分别对各设备的布置及功能进行阐述,入段线与出段线轨旁设备对称布置,功能相同。
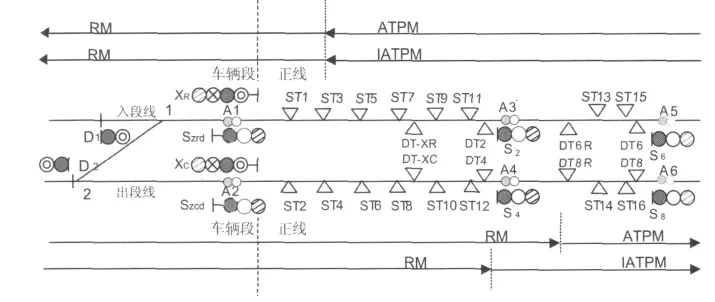
图1 转换轨的轨旁信号设备布置图 (无线天线略)
1.1 信号机
Szcd为车辆段总出发信号机,具有自动开放进路的功能,是车辆段联锁与正线联锁的分界点;XC为入段防护信号机,信号开放后,列车以不超过25 km/h的速度进入车辆段,这2架信号机都由车辆段信号系统进行控制。S4和S8信号机是列车进入正线的防护信号机,由正线信号系统进行控制。
1.2 计轴
转换轨上设置的A2、A4、A6计轴设备用于检测轨道区段的占用/空闲,其中A4计轴在筛选中还起重要作用。筛选是系统从根据轨道区段的占用/空闲进行列车追踪的后备控制模式,转换到根据列车位置进行追踪的CBTC控制模式必须要进行这一个过程,以确保此列车前方或后方没有“隐藏”的其他列车。
筛选过程是区域控制器利用车头/车尾距计轴点的距离,及计轴区段的占用情况来进行的。当车头距计轴点的距离小于最小车的长度,且下一计轴区段依然未被占用,就说明车头没有“隐藏”其他列车;当车尾距计轴点的距离小于最小车的长度,且前一计轴区段空闲,说明车尾没有“隐藏”其他列车。详细的筛选过程见图2和图3。一旦筛选成功,在列车司机显示器上会显示CBTC控制模式可用。
1.3 信标
1.版本校验信标。ST为静态信标、DT为动态信标。ST2为版本校验信标,它提供当前线路的数据库版本号。当列车经过此信标时,即进行轨道数据库版本校验。若列车正在使用的轨道数据库版本与静态信标的版本一致,列车方可以IATPM模式运行,如果不一致,列车将实施紧急制动,维护人员负责对信标进行修正。在所有投入正线运营的边界处均需设置该信标。
2.定位信标。ST4、ST6和ST8为列车定位信标,主要用于列车的初始定位。当列车以RM模式从车辆段进入转换轨后,读取到第1个定位信标ST4时,能够确定列车在线路中的位置;当列车读取到第2个定位信标ST6时,能够确定列车的运行方向;ST8信标是为防止前2个信标故障而设置的冗余信标,列车读取该组信标内任意2个信标均能完成定位功能,随后列车投入正线正常运营时,列车的位置会根据信标的检测结果逐步更新。
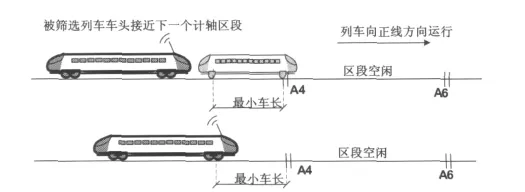
图2 列车车头筛选过程示意图
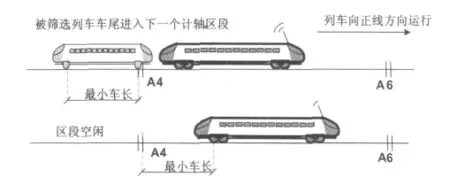
图3 列车车尾筛选过程示意图
3.筛选信标和轮径校准信标。ST10、ST12、ST14和ST16既是列车筛选信标,也是轮径校准信标。其中 ST14、ST16为筛选冗余信标,ST12、ST16为轮径校准冗余信标。筛选信标的设置主要是为了消除列车的位置误差。当列车读取到ST10和ST12信标时,进行位置校准同时启动筛选程序和轮径校准程序,开始筛选过程和轮径校准过程。在列车进行自动轮径校准时,先读取ST10或ST12信标,再读取ST14或ST16信标,在这段固定距离内通过计数轮子的圈数来计算轮子的直径。列车轮径校准不是必须的,不经过轮径校准也可以投入运营,轮径校准也可以通过人工输入数据来完成。
4.动态信标。DT-XC、DT4、DT8R和DT8为动态信标,它们与其所对应的信号机相关联,列车经过时读取的信息反映了其所对应信号机的显示状态,主要用于IATP模式下的列车运营。
2 列车出段作业
列车在车辆段停车库内按照运营计划即将投入运营时,需对其车载ATC设备进行日常发车测试,以确保车载设备能够正常工作。测试主要包括:车载控制器硬件检测、车载控制器软件检测、通信检测、接口检测 (与牵引/制动系统、速度传感器、加速度计和列车线等)、制动、门循环等。检测由列车两端的车载控制器自动执行,中间不需司机的干预。若测试未通过,将提示故障信息,列车不能投入运营;若测试通过,列车方可投入运营。
列车通过发车测试后,司机等待调度命令准备发车。调度员可设置S4和S8信号机为自动进路信号机,并排列停车库至Szcd总出段信号机的进路,司机驾驶列车以RM模式在库内按最高5km/h的速度运行,出库后按最高25km/h的速度运行至Szcd总出段信号机。若调度员此前按压了调度工作站上Szcd信号机旁的自动进路按钮,系统可自动排列Szcd信号机至S4信号机的进路;若未按压此按钮,调度员可人工排列此进路,进路开放后,司机可驾驶列车驶入转换轨。列车通过转换轨时,车载控制器通过无线设备与轨旁区域控制器ZC建立通信,同时校对轨道数据库版本;再读取ST4、ST6和ST8信标进行定位,确认列车在线路中的位置和运行方向;在CBTC模式不可用的情况下,当列车成功读取了动态信标DT4的信息后,驾驶员可转换驾驶模式为IATP运行;在CBTC模式可用的情况下,列车运行到ST10和ST12信标,开始进行筛选过程,当列车车头筛选完成时,车载设备会提示ATPM模式可用,此时司机可以把驾驶模式由RM模式转换为ATPM模式 (不能直接转为AM模式),但这时列车车尾还没有进行筛选,虽然车尾不筛选对本车的运行没有影响,但会影响到后续列车的运行,因此车尾筛选完成后是RM模式转换为ATPM模式的最佳时机,驾驶模式转换位置见图1。由于车尾筛选完毕后没有提示,需在轨旁设标志牌提醒司机驾驶模式转换的位置;列车转换为ATPM模式以后,可以转换为AM自动驾驶模式按时刻表运行至正线车站,完成列车的出段作业。
3 列车入段作业
列车从正线结束运营预回车辆段时,系统将根据列车时刻表自动排列从车站至转换轨XC信号机的进路 (或调度员人工排列进路),车辆段调度员排列XC信号机至停车库的进路。司机驾驶列车以ATPM模式 (或AM、IATPM模式)驶向转换轨(若列车以AM模式离开车站,在进入转换轨前,则必须转换为ATPM模式)。在列车读取到XC信号机的预告信标DT-XC为允许信号后,司机驾驶列车速度低于25 km/h时,车载设备会提示司机RM模式可用,此时司机可以不停车转换驾驶模式为RM模式,驶入车辆段停车库,完成列车入段作业。
4 小结
西安地铁2号线列车出入段作业的设计,基本满足了运营需求,但也存在着不足之处。比如,列车出段时,车尾筛选完成后没有提示,司机转换驾驶模式的时机不好把握;在转换轨处RM模式与AM模式不能直接转换,给司机操作带来不便,这些还有待于在以后的线路设计中加以完善。
[1] 西安市地下铁道有限责任公司.西安市地铁二号线一期工程正线信号系统设计联络文件.2010.
[2] 西安市地下铁道有限责任公司.西安市地铁二号线一期工程车辆段及停车场信号系统设计联络文件.2010.
猜你喜欢
中国惯性技术学报(2020年6期)2020-04-06
铁道通信信号(2020年11期)2020-02-07
铁道通信信号(2019年4期)2019-10-10
铁道通信信号(2018年9期)2018-11-10
铁道通信信号(2018年6期)2018-08-29
铁道通信信号(2018年3期)2018-04-19
铁道通信信号(2016年5期)2016-06-01
铁道通信信号(2016年4期)2016-06-01
铁道通信信号(2016年3期)2016-06-01
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
