
永磁同步电机矢量控制及其仿真研究
2011-07-25 07:09蒋家强曹建福
电气开关 2011年4期
蒋家强,曹建福
(西安交通大学机械制造系统工程国家重点实验室,陕西 西安 710049)
1 引言
三相永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)采用高性能永磁材料提供转子励磁磁场,永磁体相当于具有恒定电流的直流励磁线圈,代替掉了易出故障的线圈转子和电刷,克服了交流同步伺服电机的弱点,同时它具有体积小、重量轻、低惯性、效率高、转子无发热等优点。因此,它在现代运动控制系统设计得到广泛应用[1]。
近几年来,国内外学者将空间矢量PWM应用于永磁同步电机控制中,并取得了一定的成就。同时,永磁同步电机交流变频调速系统发展也很快,已成为调速系统的主要研究和发展对象。随着对PMSM控制技术要求的提高,空间矢量PWM控制系统成为首选方案[2]。本文在对永磁同步电机数学模型和矢量控制原理的研究基础上,搭建了永磁同步电机矢量控制模型并对其进行了仿真研究。
2 永磁同步电机的坐标变换和数学模型
分析正弦波电流供电的调速永磁同步电机时,最常用的方法是dq0轴数学模型,它不仅可用于分析正弦波永磁同步电机的伟台运行性能,还能分析电机的瞬态性能。
为建立正弦波永磁同步电机的dq0系数学模型,假设[3]:
(1)忽略电机铁心饱和。
(2)忽略电机绕组漏感。
(3)转子上没有阻尼绕组。
(4)永磁材料的电导率为零。
(5)不计涡流和磁滞损耗,认为磁路是线性的。
(6)定子相绕组的感应电动势波为正弦型的,定子绕组的电流在气隙中只产生正弦分布的磁势,忽略磁场的高次谐波。
2.1 坐标变换
矢量控制中所用的坐标系有静止坐标系和旋转坐标系。静止坐标系有:三相定子坐标系(abc)、两相定子坐标系(αβ);旋转坐标系为转子坐标系(dq)。由永磁同步电机的性能,最常用的控制方法是用dq数学模型,因此必须把三相定子坐标系(abc)转换成转子坐标系(dq),即进行矢量变换。常用的有三相-两相变换
(Clarke变换)和两相-两相旋转变换(Park变换)。Clarke变换(abc-αβ)为:

其逆变换(αβ-abc)为:
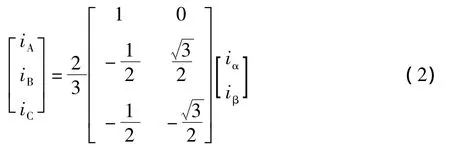
Park变换(αβ-dq)为:

则三相-两相旋转变换(abc-dq)为:

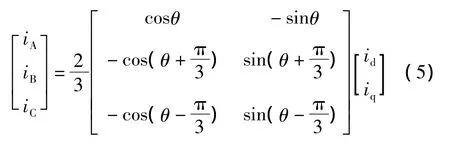
其逆变换变换(dq-abc)为:
2.2 数学模型
根据传统的假设和坐标变换,得出PMSM基于转子磁场dq0坐标系的数学模型。永磁同步电机在同步旋转坐标系下的电压方程为

转矩方程为

转矩公式中中括号内第一项是定子电流和永磁体磁场相互作用产生的转矩,第二项是转子凸极效应引起的,又称为磁阻转矩。
运动方程为

其中,ud、uq为定子电压的 dq分量;id、iq为定子电流的dq分量;Ld、Lq为dq轴定子线圈的自感;Rs为电枢绕组电阻;ωe为转子电角速度;ψr为转子磁链;p为微分算子;np为电机极对数;Te为电磁转矩;TL为负载转矩;B是阻尼系数;ω是转子机械角速度;J是转动惯量。
3 矢量控制的基本原理
永磁同步电机矢量控制原理框图如图1所示,其控制的主要思想是:
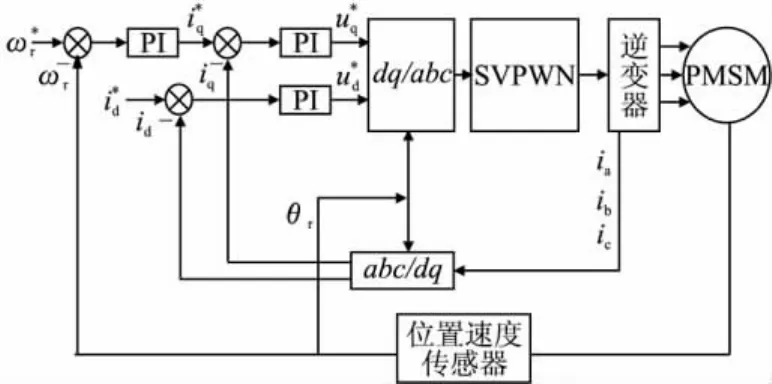
图1 永磁同步电机矢量控制原理框图
(1)根据位置速度传感器返回的速度信息,计算所需速度ωr和实际速度的偏差作为速度PI控制器的输入,它的输出就是所需的电流分量。
(3)把电流PI控制器输出的电压分量经过2r/3s变换,然后输入到(SVPWM)模块中,从而产生一组新的PWM波,并结合三相逆变器将重新生成的三相定子电压矢量送入到永磁同步电机中,使电机能按照新的速度指令进行运转,由此完成了整个系统的速度伺服控制过程[4]。
永磁同步电机采用dq0系转子磁链定向控制,并使d轴电流=0,这是最简单的电流矢量控制方法,从电机端口看,相当于一台他励直流电机,定子电流中只有q轴分量,且定子磁链空间矢量与永磁体磁链空间矢量正交。电机电磁转矩与q轴电流分量成正比,即

图2所示为=0时永磁同步电机空间矢量图,由于定子电流d轴分量为0,不存在d轴电枢反应,因此不产生去磁作用,去磁系数为0。
4 永磁同步电机仿真研究
根据上述分析,采用MATLAB/SIMULINK搭建了永磁同步电机矢量控制仿真模型(=0),并对模型进行了仿真。仿真参数为:Rs=0.2Ω,Ld=Lq=0.0085H,ψr=0.175Wb,np=4,B=0,J=0.089kg·m2。
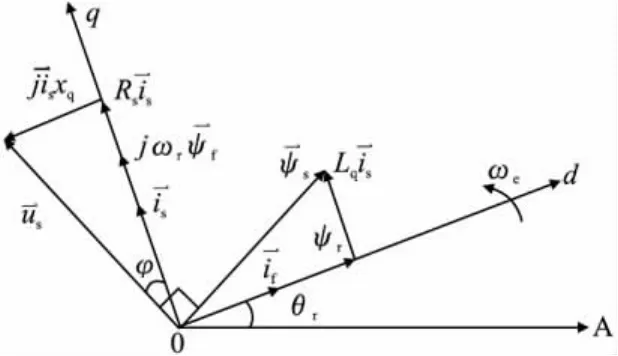
图2 永磁同步电机空间矢量图
给定转子速度为300r/min,电机带10N·m的负载启动。在0.8s时,系统突然减负载运行,从10N·m减到4N·m,在1.4s时,负载又增至10N·m。仿真结果如图3所示。

图3
从图3的仿真图可以看出:
(1)永磁同步电机矢量控制系统启动速度较快,转速平稳上升,在0.37s时,转子转速达到给定值300r/min,系统趋于稳定,在启动过程中,启动转矩和启动电流较大。
(2)电机带10N·m的负载启动,在0.37s后稳定运行,电磁转矩在10N·m上下波动,转矩波动小。定子电流接近于正弦波。
(3)在0.8s时,系统突然减负载运行,从10N·m减到4N·m,在1.4s时,负载又增至10N·m,在这过程中,电磁转矩反应很快,能够迅速跟踪负载转矩;定子电流随负载变化而快速响应,并迅速达到稳态,系统的动态性能良好;电机转速基本没有波动,说明系统抗干扰能力强。
5 结论
在分析永磁同步电机数学模型及矢量控制原理的基础上,在MATLAB/SIMULINK环境下建立了永磁同步电机矢量控制系统的仿真模型,仿真结果表明当系统的给定负载变化时,系统能对负载进行很好的跟踪控制,具有较强的鲁棒性。
=0控制方法的最大优点是电机的输出转矩与定子电流的幅值成正比。其性能类似于直流电机,控制简单,无去磁作用,因此得到了广泛应用。
[1]蔡祺祥.交流永磁同步电机位置伺服系统的研究[D].南京航空航天大学,2009:2.
[2]何继爱,王惠琴.永磁同步电机空间矢量控制系统的仿真[J].电力系统及其自动化学报,2005,17(6):12.
[3]冯晓云.电力牵引交流传动及其控制系统[M].高等教育出版社,2009:12.
[4]孙环阳,黄筱调,洪荣晶,等.永磁同步电机矢量控制系统的仿真研究[J].机械设计与制造,2010,3(3).
猜你喜欢
体育科技文献通报(2022年3期)2022-05-23
新高考·高二数学(2022年3期)2022-04-29
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
电子制作(2019年23期)2019-02-23
光学精密工程(2016年3期)2016-11-07
中学数学杂志(初中版)(2016年5期)2016-11-01
大电机技术(2015年5期)2015-02-27
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
