
Structure and Dynamic Characters of New Radar Stabilized Platform
2011-07-25 06:21:54XUEShan薛珊CAOGuohua曹国华FANHuilin范惠林LVQiongying吕琼莹
Defence Technology 2011年4期
关键词:国华
XUE Shan(薛珊),CAO Guo-hua(曹国华),FAN Hui-lin(范惠林),LV Qiong-ying(吕琼莹)
(1.College of Mechanical and Electric Engineering,Changchun University of Science & Technology,Changchun 130021,Jilin,China;2.Aviation Weapon Engineering Department,Aviation University of Air Force,Changchun 130022,Jilin,China)
Introduction
Some ship-based radar needs to keep stationary relative to inertial space.But,it is difficult to be stabilized as the naval vessel’s swing interference.The stabilized platform can isolate naval motion to keep stationary.As supporting apparatus of antenna,the light and minimized platform with higher accuracy,larger rigidity and better dynamic performances is paid more and more attention[1-2].
Nowadays,the traditional internal rotor structure is applied in most of radar stabilized platforms.Because the internal rotor torque motor can only output smaller torque,its stationary is not good.Also,its transmission link is complicate,and the moment of inertia,elastic deformation,inverse space,movement delay,friction,vibration,noise and wearing are increased.It is not easy to be manufactured because it has lower accuracy and more precise parts[3].
A kind of radar stabilized platform with external rotor is designed in this paper.The external rotor torque motor and integral structure are used in it.Consequently,the operating accuracy and stationary of the platform with light weight and large rigidity is better.
1 Structure Design of Stabilized Platform with External Rotor
The stabilized platform can isolate the carrier vessel’s motion to keep the ship-based radar’s stationary in the inertial space.The isolating method is to move in opposite direction around pitch and azimuth axis.The platform with external rotor eliminates the additional pitch axis.The rotor of azimuth axis torque motor and the stator of pitch axis torque motor are integrally designed.The azimuth axis shell can act as the pitch axis,as shown in Fig.1.Two embedded torque motors are used instead of the traditional transmission structure.The platform consists of the base,vertical azimuth axis,horizontal pitch axis and loading table.The stator of azimuth axis torque motor is fixed on the base,and the stator of pitch axis torque motor is fixed on the rotor of azimuth axis torque motor.The loading table is connected with the pitch axis.The azimuth and pitch axes are integrated.The stator and rotor of pitch axis torque motor are drove by rotor of azimuth axis torque motor to rotate around the azimuth axis.The rotor of pitch axis torque motor is connected with the loading table.Thus,the table can rotate around the pitch and azimuth axes.The azimuth axis shell can act as the pitch axis to reduce two transmission links.The transmissions from the azimuth axis to the rotor of pitch axis motor and from the rotor of pitch axis to the pitch axis are eliminated.
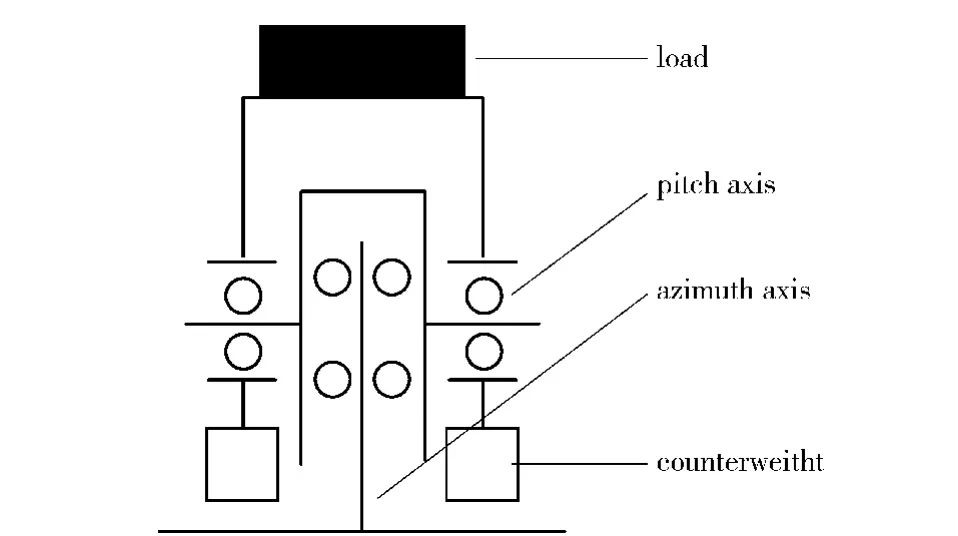
Fig.1 Principle sketch of stabilized platform with external rotor
The structure of stabilized platform with external rotor is shown in Fig.2.
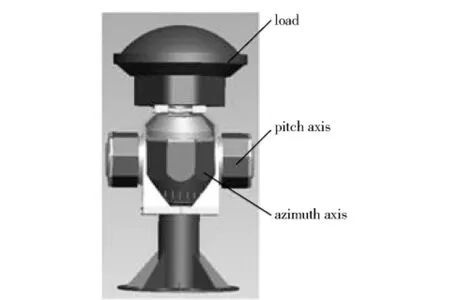
Fig.2 Structure sketch of stabilized platform with external rotor
2 Structure and Dynamic Character Analyses for Stabilized Platform with External Rotor
2.1 Structure Analysis of Stabilized Platform with External Rotor
For convenience in analyses,two stabilized platforms with the same size,which have external and internal rotors respectively,are designed and compared in this paper.
2.1.1 Structure Design of Stabilized Platform with Internal Rotor
The principle of stabilized platform with internal rotor is shown in Fig.3.Its base is fixed,and the rotor of azimuth axis motor drives the azimuth axis.And the pitch axis is drove to rotate around the azimuth axis.The rotor of pitch axis motor drives the pitch axis to rotate.The loading table is drove to rotate around the pitch axis.Thus,it can rotate around both azimuth and pitch axes.
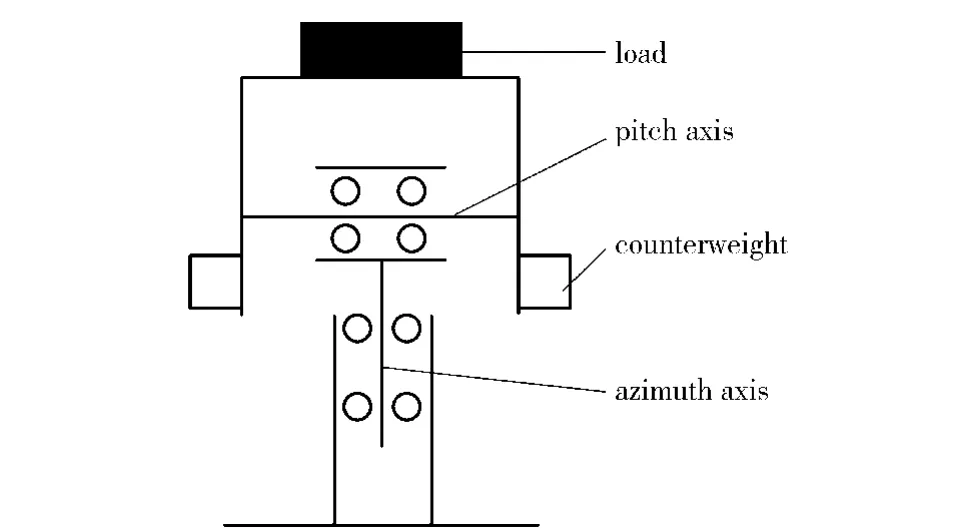
Fig.3 Principle sketch of stabilized platform with internal rotor
The structure of stabilized platform with internal rotor is shown in Fig.4.
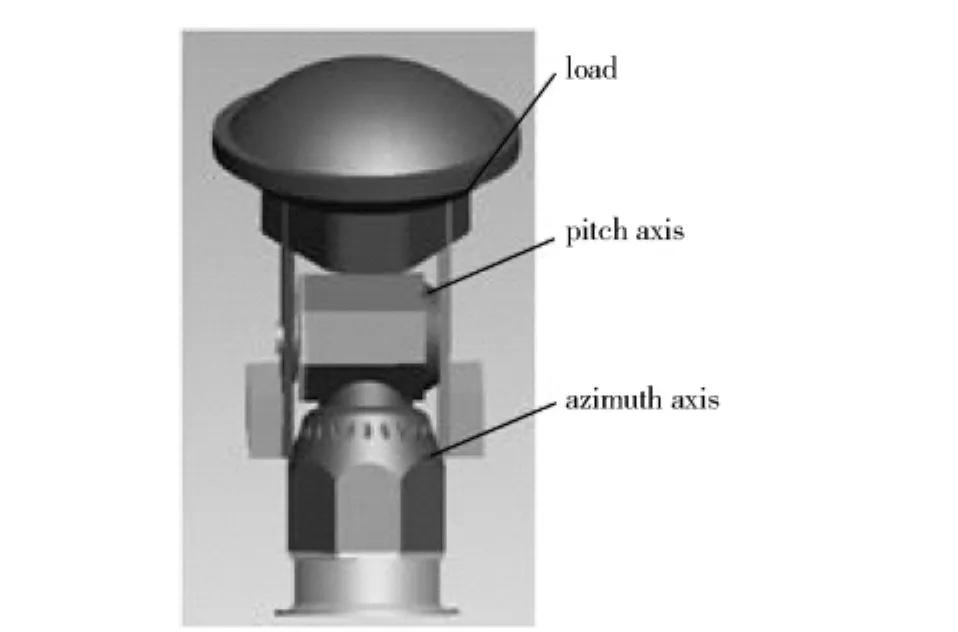
Fig.4 Structure sketch of stabilized platform with internal rotor
2.1.2 Structure Analysis for Stabilized Platform with External Rotor
After comparison,the advantages of platform with external rotor can be summarized.
1)As the external rotor motor is used in the plat-form with external rotor,its output torque is larger than that of internal rotor motor with the same volume.Because the diameter of its rotor ring is larger,more permanent magnets can be contained.The platform will operate smoothly and steady.
2)The platform with external rotor is integrally designed.The external rotor of azimuth axis motor and the stator of pitch axis motor are mixed together.The azimuth axis shell can act as the pitch axis to reduce two transmission links.The moment of inertia,elastic deformation,inverse space,movement delay,friction,vibration,noise and wearing resulted from those links are all eliminated.The platform can operate more accurately and stationary.The number of precise parts is decreased by 20%,compared with the platform with internal rotor.
3)The weights of platforms with internal and external rotors are 193 kg and 155 kg,respectively.The platform with external rotor meets the design requirements better.
2.2 Dynamic Characters of Stabilized Platform with External Rotor
2.2.1 Modal Analyses
The modal analysis is the most basic and important part of the dynamic character analysis.It is the modern method to study the structure.And,it is a powerful tool to design and evaluate the product structure.The natural frequency and deformation amplitude of system can be obtained by modal analysis.The rigidity can be analyzed and the resonance vibration can be avoided.
Based on the variation principle of elastic mechanics,the dynamic balance equation of stabilized platform can be expressed as

where[M]is the mass matrix,[C]the damping matrix,[K]the rigidity matrix,{P(t)}the external force function vector,{N}the nonlinear external force vector related with{}and{u},{Q}the boundary constrain counterforce vector,{u}the shifting vector,{}the speed vector,{}the acceleration vector.
To solve the natural frequency and vibration mode of the stabilized platform,let the external force and damping be zero.Thus,

And the corresponding characteristic equation is

whereωis the natural frequency.
Because the amplitude of free vibration can not be zero,i.e.,{u}≠0,the Eq.(3)can be rewritten as

The modalities of the stabilized platforms with external rotor and internal rotors are analyzed with ANSYS software,respectively[5].The comparison of the natural frequency of the eight modal in Tab.1 shows the results.The first and second order modalities are shown in Fig.5 -8.It can be seen that:
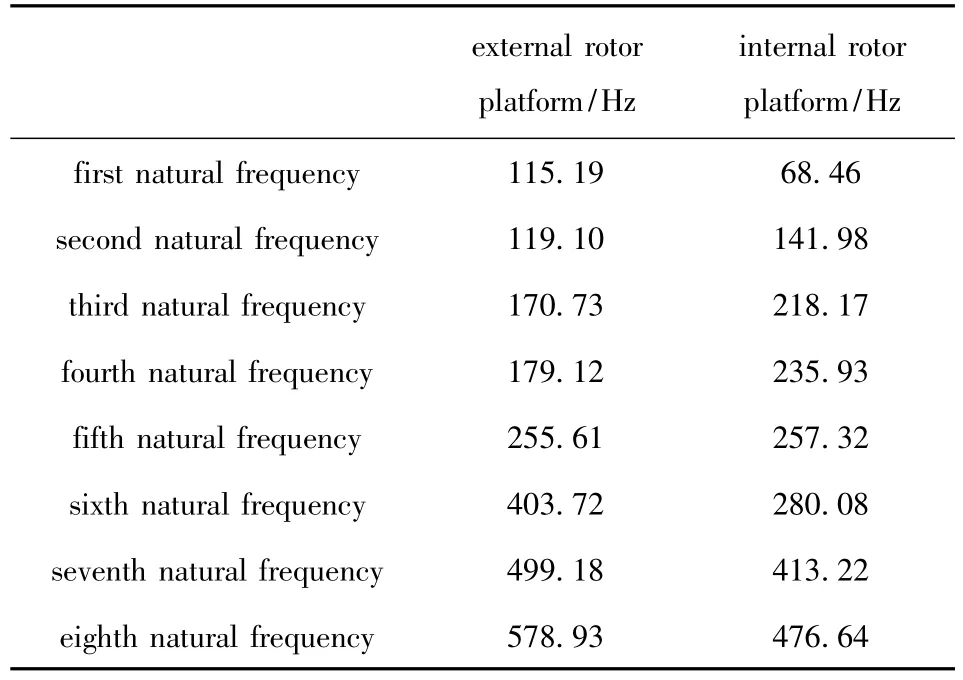
Tab.1 Modality of stabilized platforms with internal rotor and external rotor
1)The first natural frequency of the stabilized platform with external rotor is increased by 68%,compared with the platform with internal rotor.
2)The relative deformation of the stabilized platform with external rotor is less than that of the platform with internal rotor.Its larger rigidity results in more smooth operation.
2.2.2 Harmonic Response Analyses
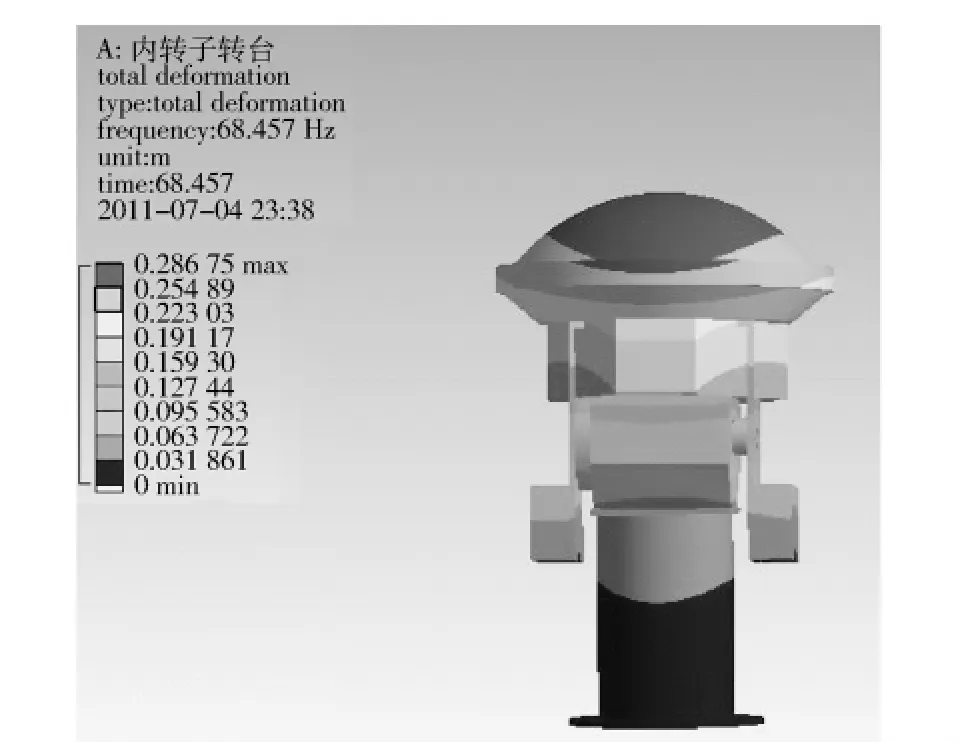
Fig.5 1st order modality of stabilized platform with internal rotor
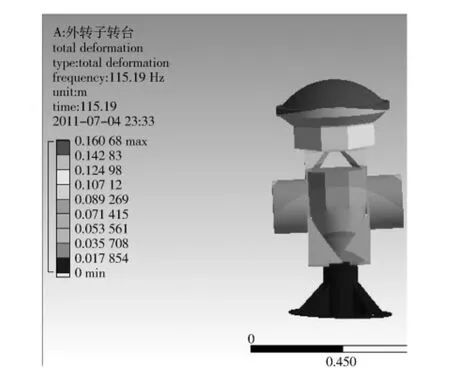
Fig.6 1st order modality of stabilized platform with external rotor
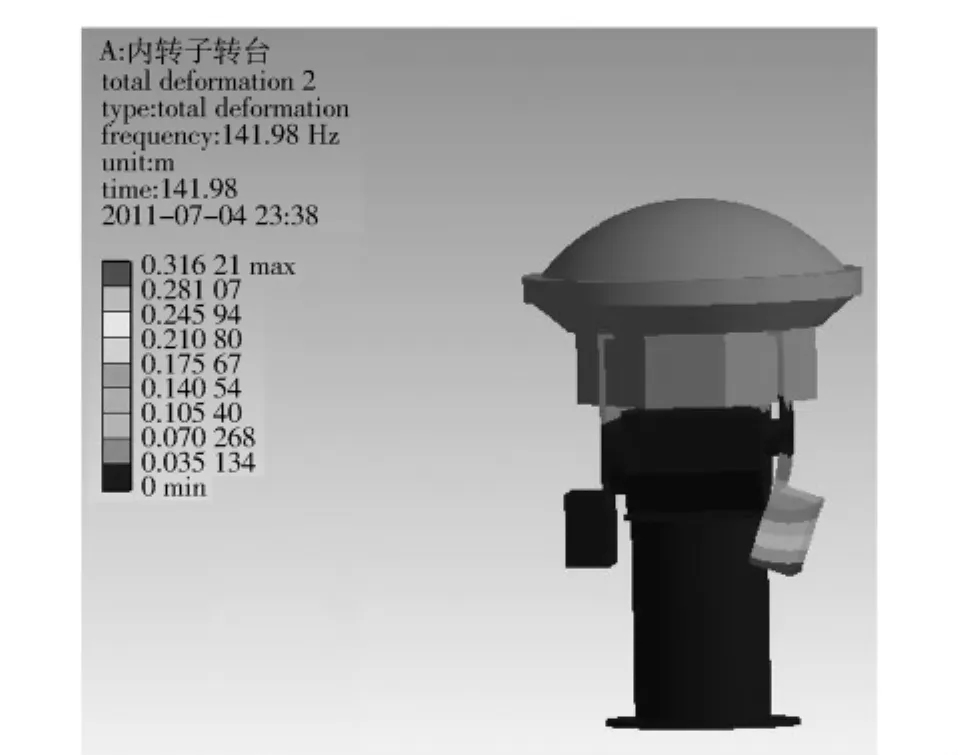
Fig.7 2nd order modality of stabilized platform with internal rotor
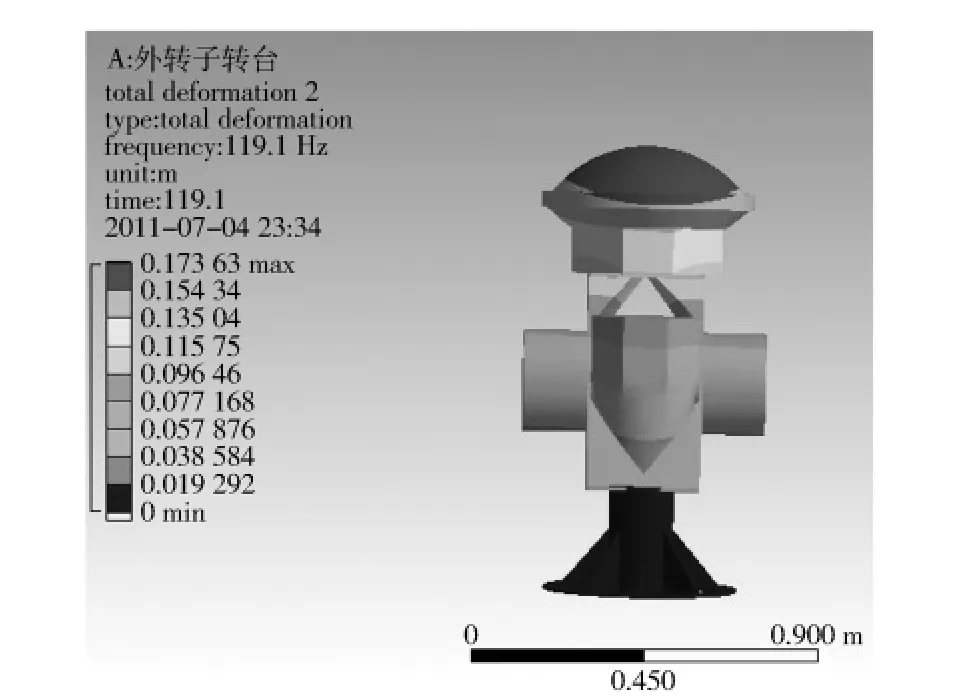
Fig.8 2nd order modality of stabilized platform with external rotor
The harmonic response analysis is an important method in dynamic character analysis.The continuous dynamic character can be predicted by harmonic response analysis.As a result,the ability to eliminate harmful effect of resonance and other forced vibration can be validated.The dangerous deformation of key parts can be forecasted at the concerned frequency.
The dynamics equation under external excitation force can be written as

[M]is the mass matrix,[C]the damping matrix,[K]the rigidity matrix,{F(t)}the external force function vector,{u}the displacement vector,{}the speed vector,{}the accelerator vector.
The stabilized platform must avoid the resonance at concerned frequency underF(t).And the required frequency ranges from 0-50 Hz and from 2 000-8 000 Hz.The harmonic responses in the range from 0-150 Hz and from 0-10 000 Hz are shown in Fig.9 -10.
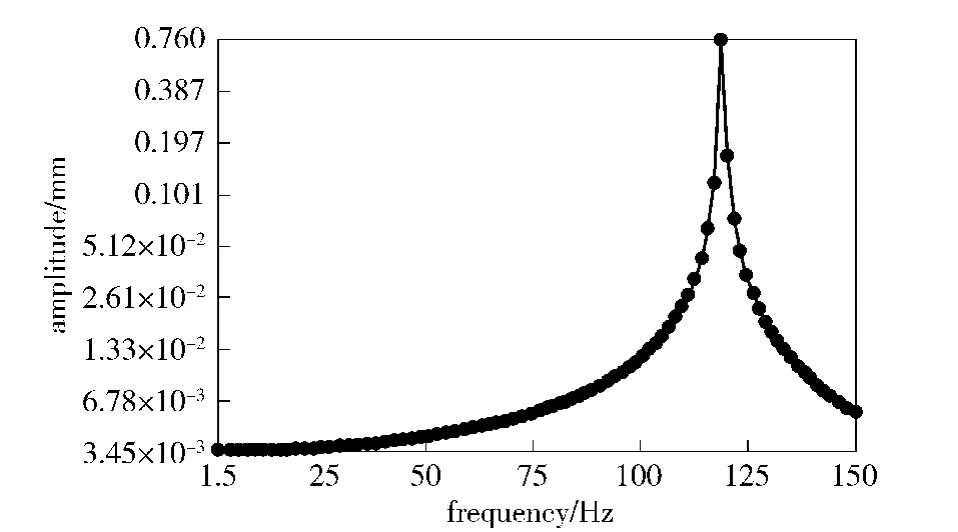
Fig.9 Harmonic response of key parts in range from 0 Hz to 150 Hz
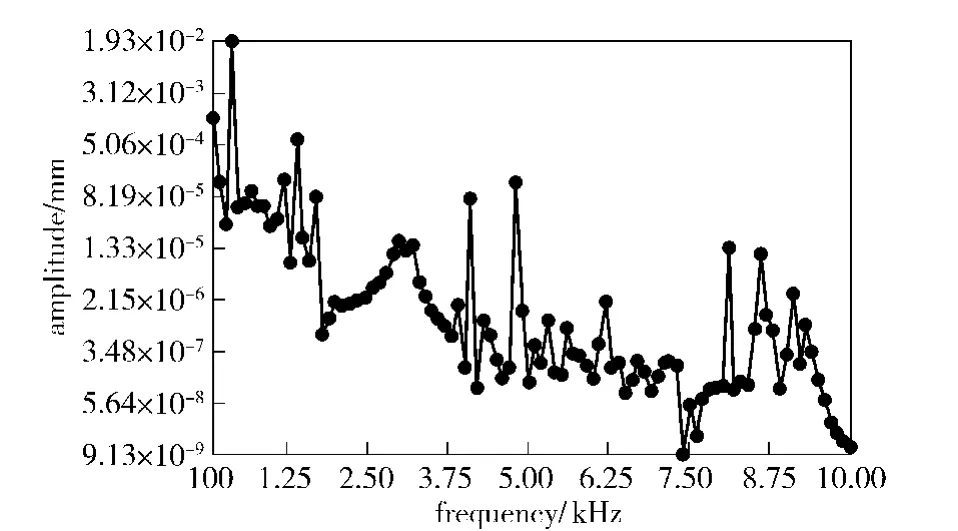
Fig.10 Harmonic response of key parts in range from 0 Hz to 10 kHz
It can be seen from Fig.9 that the maximum deformation of key parts in the range from 0-50 Hz is 0.003 45 mm.The resonance is avoided.Because the 1st natural frequency is 115.19 Hz,there is a displacement peak is at frequency of 115 Hz.As shown in Fig.10,the maximum deformation is 8.19 ×10-5mm in the range from 2 000-8 000 Hz.No resonance occurs.It means that the resonance can be avoided,the deformation meets design requirements.
3 Conclusions
1)The stabilized platform with external rotor is designed in this paper.The output torque is enlarged with application of external rotor torque motor.The mechanical efficiency is increased also.Its larger rotor ring in diameter can contain more permanent magnets,and the platform can operate more smoothly and steady.
2)The transmission link can be reduced by using the orthogonal shafts.The moment of inertia,elastic deformation,inverse space,movement delay,friction,vibration,noise and wearing resulted from the link are eliminated.The operation accuracy and stationary are increased.The number of precise parts is reduced.
3)The weights of two designed platforms with the same size are 193 kg and 155 kg,respectively.The weight of the platform with external rotor is lightened by 20%.
4)It is shown from dynamic character analysis that the 1st natural frequency is increased by 68%and the rigidity is enlarged by 14.8%.
5)The results from harmonic response analysis show that the designed platform with external rotor can support the demanded load.The resonance can be avoided.It meets all the design requirements.
The comparative analysis indicates that the designed platform with external rotor can operate steady.It has well superiority and practicability.
[1]Russell J C.A control system and application program interface(API)for an elevation over azimuth tracking pedestal[D].Cape Town:University of Cape Town,2008.
[2]DUAN Yong-jun,GU Ji-feng,PING Li-hao,et al.Mode analysis and experiment research of radar antenna pedestal[J].Machinery Design & Manufacture,2010,2(2):214-216.(in Chinese)
[3]YU De-hai,ZHANG Wen-feng,BAO Wen-lu,et al.By exchange permanent magnet synchronous exterior rotor type torque motor drive multi-axial turntable:China,200710010047.6[P].2007-08-08.(in Chinese)
[4]BI Yong-li.Study on control system of multi-frame photoelectric platform[D].Changchun:Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,2003.(in Chinese)
[5]ZHANG Chao-hui.ANSYS12.0 structure analysis application example analytic[M].Beijing:Machinery Industry Press,2010.(in Chinese)
猜你喜欢
Journal of Donghua University(English Edition)(2023年4期)2023-09-22 14:30:26
Chinese Physics B(2022年3期)2022-03-12 07:47:24
Journal of Donghua University(English Edition)(2021年5期)2021-11-02 01:30:56
上海工艺美术(2021年4期)2021-04-24 22:05:58
科技研究·理论版(2021年22期)2021-04-18 00:43:01
金秋(2020年12期)2020-10-21 01:56:06
民生周刊(2019年16期)2019-08-22 04:48:31
水动力学研究与进展 B辑(2018年4期)2018-09-28 05:34:08
能源(2018年6期)2018-08-01 03:41:52
中国铁路文艺(2015年12期)2016-01-04 18:50:54

- Defence Technology的其它文章
- An Estimation Method for Kill Probability Based on Random Residence Time Series
- Numerical Simulation on New Perforator
- An Effective Method of Threshold Selection for Small Object Image
- Modeling and Simulation of Aerial Dispersion on Piston Dispersal Mechanism
- Test and Analysis for Spraying Ammonia in Diesel Engine
- Variable-mass Thermodynamics Calculation Model for Gas-operated Automatic Weapon