
车载捷联式三轴稳定平台动力学建模与分析
2011-07-19 05:47满益明江燕华胡玉文陈慧岩龚建伟丁祝顺
哈尔滨工业大学学报 2011年9期
满益明,江燕华,胡玉文,陈慧岩,龚建伟,丁祝顺
(1.北京理工大学,智能车辆研究所,100081 北京,manyiming@163.com;2.北京航天控制仪器研究所,100854 北京)
车载捷联式三轴稳定平台动力学建模与分析
满益明1,2,江燕华1,胡玉文1,陈慧岩1,龚建伟1,丁祝顺2
(1.北京理工大学,智能车辆研究所,100081 北京,manyiming@163.com;2.北京航天控制仪器研究所,100854 北京)
为了获得车载捷联式三轴稳定平台的耦合力矩特性,建立了稳定平台系统的运动学与动力学模型.运动学模型分析结果表明,捷联稳定方式与陀螺稳定方式的基本区别在于信息的获取和控制方式,速率陀螺稳定是一种直接硬件补偿方法,而捷联稳定是一种软件补偿方法.动力学模型分析表明,车体与稳定平台系统各框架和各框架间均存在非线性耦合力矩.系统耦合性试验验证了系统模型的有效性,且获得了各框架耦合性大小的边界范围,为进一步研究车载捷联式三轴稳定平台系统性能提供了理论基础.
捷联稳定平台;车载平台;动力学;运动学
履带式智能车辆在非结构环境下行驶时,复杂的地形将使车体的姿态变化更为剧烈.因缺乏环境的先验信息,环境感知传感器视线受到外界扰动后,获取的信息即使处理后也很难真实反映外界行驶环境,其结果最终将降低履带式智能车辆的行驶安全性和机动性.其次,相关技术的限制使常用环境感知传感器不能提供类似于人眼的大范围视野.当环境感知传感器的视野受到地形遮挡等因素的影响时,获取的环境信息不能满足履带式智能车辆安全性需求的概率将大大增加,严重威胁智能车辆的行驶安全.目前,陀螺稳定平台因实现简单且精度高,在智能车辆领域得到了广泛应用[1-5].但是由于履带式智能车辆顶装甲板面积有限,且还需要安装较多其他类型的传感器以保证智能车辆的自主驾驶,而陀螺稳定平台需要的安装空间较大.
捷联惯性导航信息的复用为智能车辆的导航定位、视线稳定和地图构建等功能的一体化提供了可能.采用捷联稳定平台可实现履带式智能车辆环境感知传感器的视线稳定和动态视野.虽然捷联稳定方式在机载[6]、弹载[7]、舰船[8]、火炮[9]等领域[10-12]的应用已初具规模,但是在智能车辆领域才刚刚起步,其原因和智能车辆复杂多变的使用环境密切相关.本文的工作为进一步开展履带式智能车辆捷联式视线稳定性能的研究提供了理论依据.
1 车载捷联式三轴稳定平台坐标系定义
车载捷联式三轴稳定平台采用方位-横滚-俯仰3自由度万向支架,外框为方位环,中框为横滚环,内框为俯仰环.履带式智能车辆的环境感知传感器安装在稳定平台内框上,可以绕方位轴、横滚轴和俯仰轴转动,具有3个自由度.稳定平台的惯性传感器采用的是惯性测量单元,安装在车体上,作为车体姿态的敏感元件,其输出属于导航坐标系.稳定平台各框架的角位置信息由角位置传感器测量给出,其输出属于稳定平台的各个框架坐标系,同时车载捷联式三轴稳定平台系统还涉及车辆坐标系.为了方便问题讨论,对稳定平台各个框架和车体分别建立了坐标系,如图1所示.
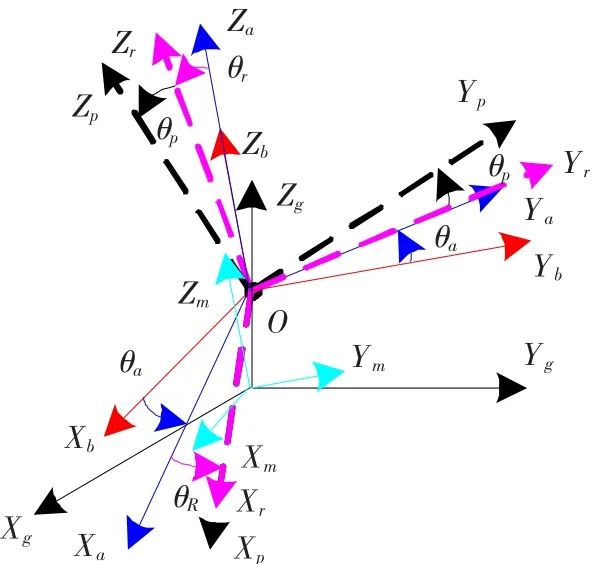
图1 各坐标系间的几何关系
图中,Og-XgYgZg为东北天的导航坐标系,Om-XmYmZm为车体坐标系,原点取在车体重心处,O-XbYbZb为基座坐标系,与车体固连,Z方向距车体坐标系的距离为 Dmb,O -XaYaZa、O -XrYrZr、O-XpYpZp分别为外框,中框和内框坐标系.θa、θr、θp分别为稳定平台的方位角、横滚角和俯仰角.
2 框架运动学关系
根据框架结构和复合运动原理可知,内框运动是内框自身转动与中框耦合运动的合成,中框运动是中框自身转动与外框耦合运动的合成,而外框运动则是由外框自身转动和基座运动共同引起的.因此,台体上的环境感知传感器视线运动由内框、中框、外框和基座运动合成得到.
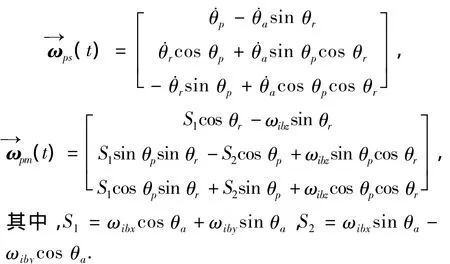
2.1 框架角速度
设基座与外框坐标系角速度矢量分别为
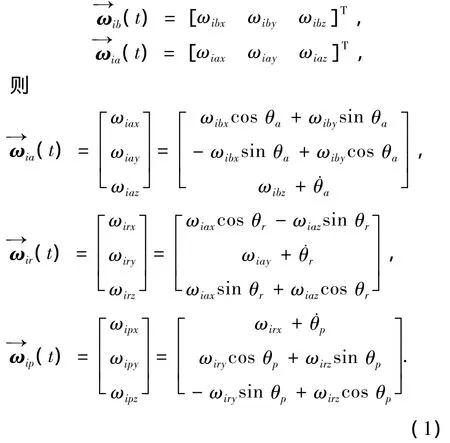
由式(1)可得,环境感知传感器视线在导航坐标系下的角速度矢量为

2.2 框架角加速度
对上节各框架的角速度表达式求导,就可获得车载捷联式三轴稳定平台系统的各框架角加速度表达式.对式(1)进行微分,得到各框的角加速度矢量为

由式(3)可以看出,除框架自身角加速度外,车体角速度和角加速度及框架角速度均会耦合到各框架,且中框和内框还存在框架间的角速度和角加速度的交叉耦合.
3 动力学模型与分析
为了简化分析,本文中不考虑稳定平台各部件间的弹性变形.将外框、中框和内框看作3个活动刚体,分别考虑每个框架的动力学模型,然后再对其进行综合分析.
3.1 内框动力学模型
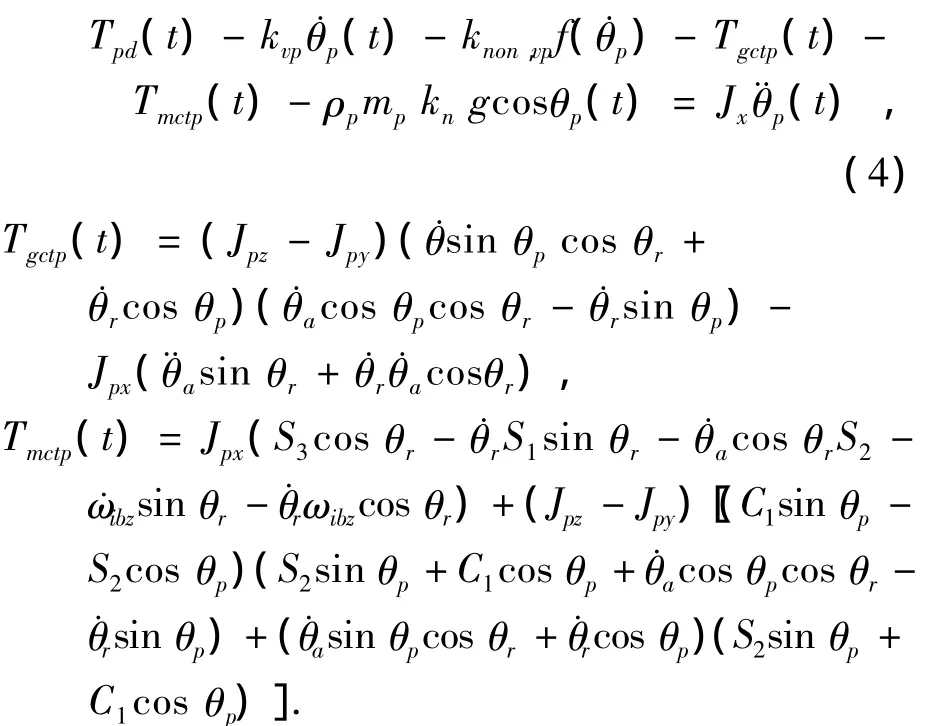
3.2 中框动力学模型
中框除受到中框驱动电机的轴向力矩外,还受到两个相互垂直方向上的耦合力矩,分别作用于内框(与内框作用在中框的力矩互为反作用力矩)和外框.
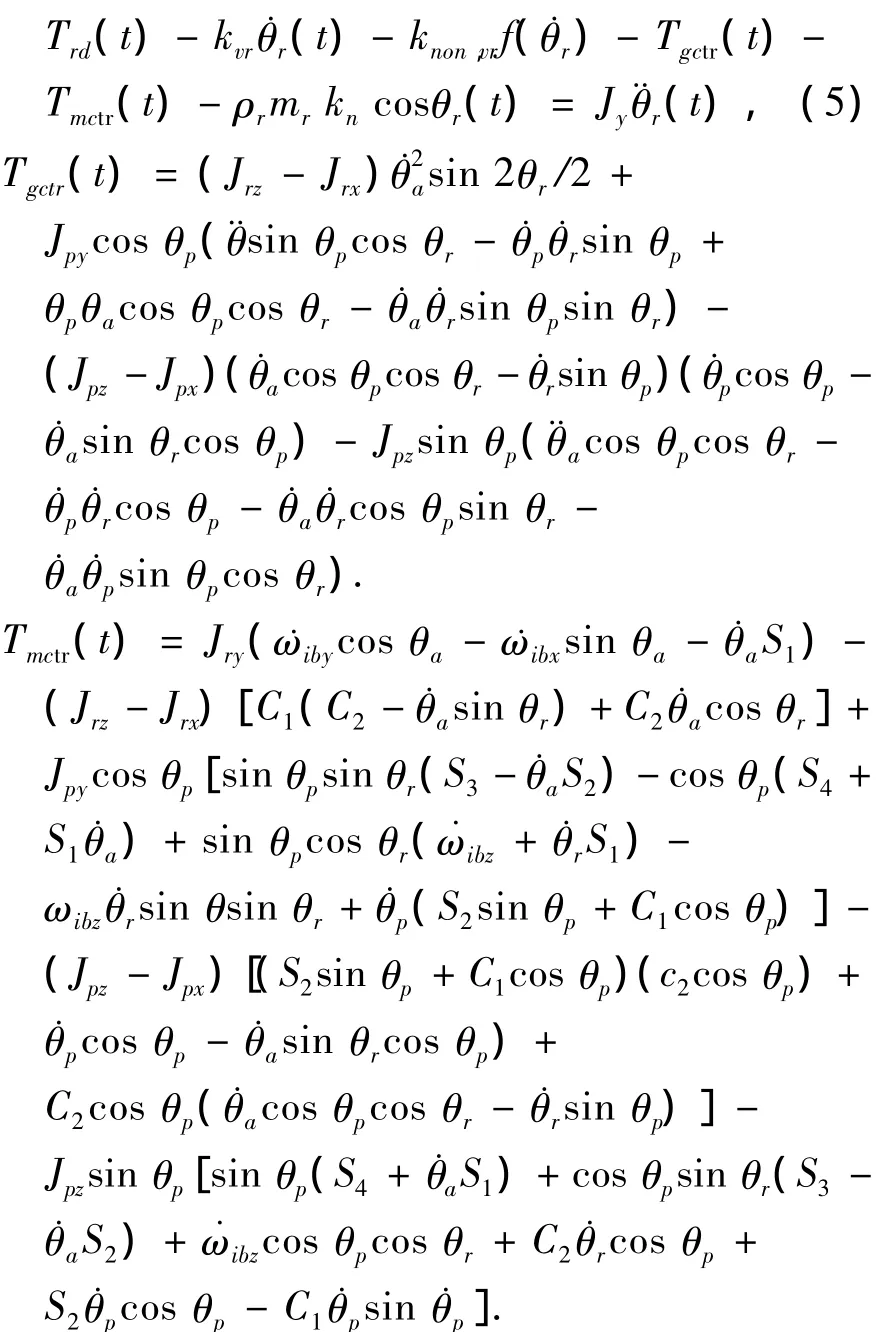
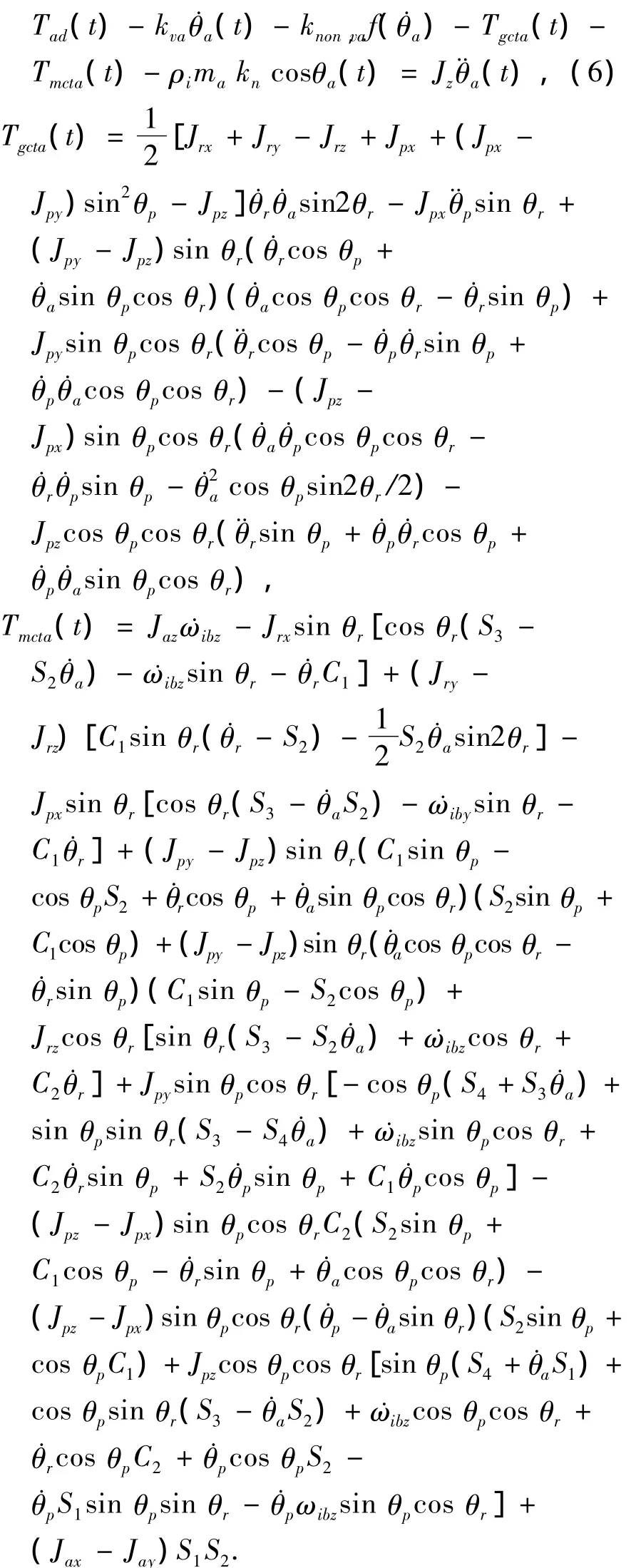
3.3 外框动力学模型

4 试验与分析
为了定量分析车体耦合与框架交叉耦合,本文设计了车载捷联式三轴稳定平台系统框架耦合性试验.试验时,对稳定平台不同框架输入不同的激励,通过稳定平台各框架实际输出与理论输入的对比对框架耦合性进行分析.
框架耦合性分析的输入激励为正弦波,其表达式为

其中,A为正弦波的幅值,f为正弦波的频率,n为采样数,ΔT为发送间隔时间,即采样周期.
由于车载环境感知传感器安装在稳定平台台体之上,且内框的耦合性最大,因此下面将只详细分析内框的耦合性,对于中框、外框的耦合性稍后将只给出结论.
由单个框架的角位置误差曲线可以获得稳定平台该框架因车体的耦合力矩、不平衡力矩和摩擦力矩等所引起的误差特性.当输入激励的振幅和频率保持与单个框架运动时的输入激励一样时,通过增加同时转动框架的数量,即可获得不同框架间耦合性的大小.图2~5为正弦输入激励振幅为3°和5°,输入频率为1 Hz和2 Hz的4种不同组合下的耦合试验结果.
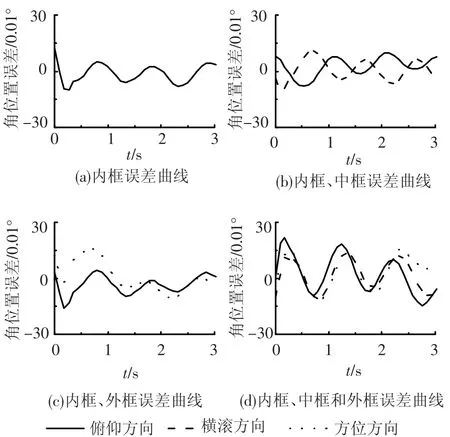
图2 输入幅值A=3°,频率f=1 Hz正弦波时的框架耦合性误差曲线
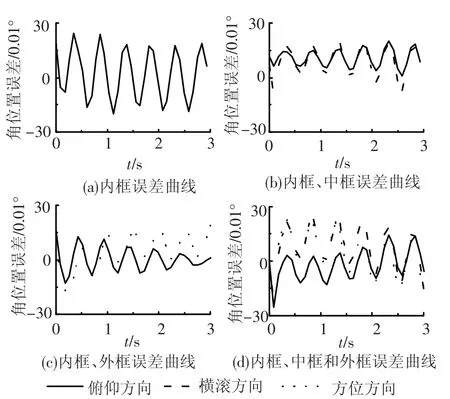
图3 输入幅值A=3°,频率f=2 Hz正弦波时的框架耦合性误差曲线
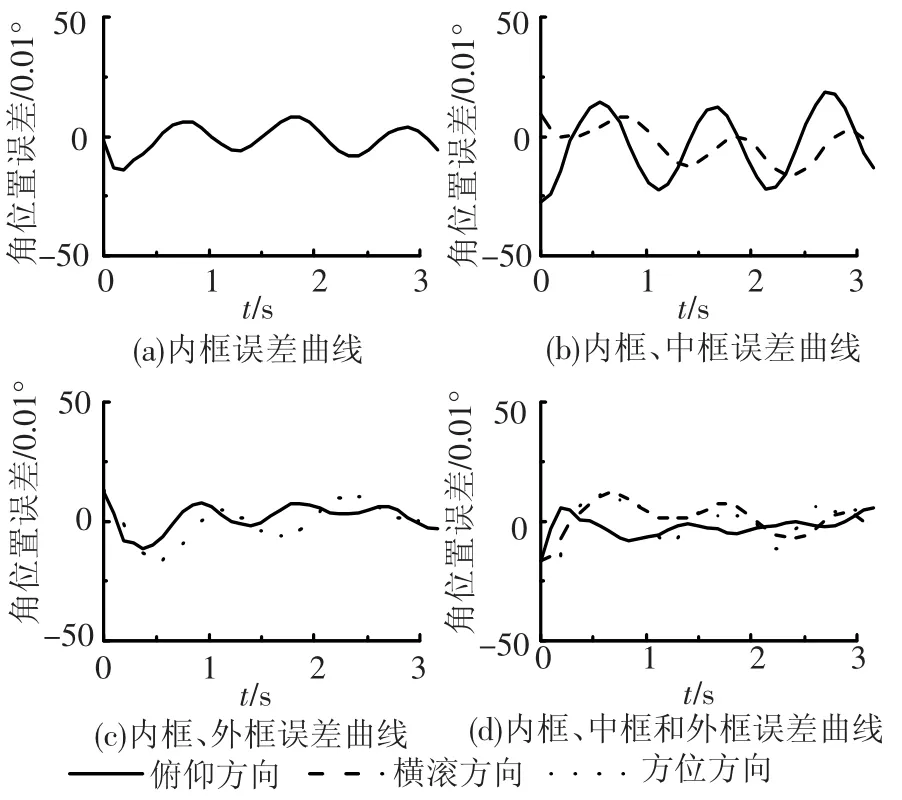
图4 输入幅值A=5°,频率f=1 Hz正弦波时的框架耦合性误差曲线
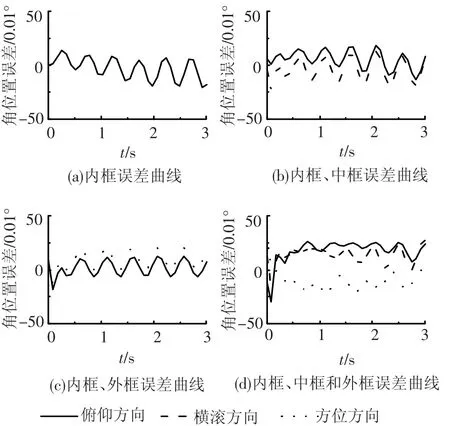
图5 输入幅值A=5°,频率f=2 Hz正弦波时的框架耦合性误差曲线
图2为输入不同方向的正弦激励时,稳定平台内框、内框分别与中框、外框及中框和外框一起转动时的耦合性误差曲线.从图中可以看出,内框与车体俯仰方向的最大耦合约为5%,中框与内框的耦合、外框与内框耦合最大约为3%,三框同时运动时,中框和外框作用域内框的耦合最大约为4%;从图中还可以得出,中框对内框的耦合作用要大于外框的耦合,这与文献[13]的结论一致.
分别对比图2与图3和图4与图5可知,车体的激励频率对框架间的耦合作用比较小,车体对内框的最大耦合作用约为8%,中框和外框对内框的耦合作用增大了约为2%.
分别对比图2与图4和图3与图5可得,除去因不平衡力矩、摩擦和传动间隙等引起的误差增大外,输入激励的幅值对框架间的耦合影响较小.
综上,内框所受到的框架间的最大耦合约为4%,与车体的最大耦合约为8%.经过对中框和外框的分析,框架间的最大耦合小于5%,与车体的耦合约为10%.耦合性大小的确定,直接证明了所得模型——式(4)~(6)的正确性.
由于框架间的耦合作用较小,在设计稳定平台时,可将其忽略,通过机械结构的设计来保证[14],而本课题所利用的稳定平台是已有研究设备,框架间的耦合无法通过机械结构来消除.因此,车载捷联式三轴视线稳定平台系统的控制系统设计不仅需要考虑车体对框架的耦合,而且还需考虑框架间的耦合.
5 结 论
1)本文在全面考虑平台所受扰动力矩的前提下,建立了车载捷联式三轴稳定平台系统的运动学和动力学模型,为用于智能车辆视线稳定和动态视野的捷联式三轴稳定平台的设计提供了理论依据.
2)分析了平台框架运动学耦合关系,说明了捷联稳定方式与速率陀螺稳定方式的区别在于信息获取和控制方式.
3)动力学模型的分析表明,车体与三轴稳定平台系统各框架和各框架间均存在非线性耦合力矩.
4)结合已有稳定平台,设计了耦合性试验,通过对试验结果的定量分析,获得了各框架耦合性大小的边界范围:内框所受到的框架间的最大耦合约为4%,与车体的最大耦合约为8%.经过对中框和外框的分析,框架间的最大耦合小于5%,与车体的耦合约为10%.
5)耦合性试验结果的分析表明理论分析是正确性的.
[1]DICKMANNS E D.Vision:von assistenz zum autonomen fahren[C]//Fahrerassistenzsysteme mit maschineller Wahrnehmung. Berlin Heidelberg:Springer,2005:203 -238.
[2]GUNTHNER W,WAGNER P,ULBRICH H.An inertially stabilised vehicle camera system -hardware,algorithms,test drives[C]//Proceedings of the 32nd Annual Conference on IEEE Industrial Electronics.Piscataway,NJ,USA:IEEE,2006:3815 -3820.
[3]SCHWARTZ I.PRIMUS:autonomous driving robot for military applications[C]//Proceedings of the 2000 SPIE Conference on Unmanned ground vehicle technology II.Orlando,FL;USA:SPIE,2000:313-323.
[4]URMSON C,RAGUSA C,RAY D,et al.A robust approach to high-speed navigation for unrehearsed desert terrain[J].Journal of Field Robotics,2006,23(8):467-508.
[5]GOEBL M,ALTHOFF M,BUSS M,et al.Design and capabilities of the Munich cognitive automobile[C]//Proceedings of the 2008 IEEE Intelligent Vehicles Symposium.Piscataway,NJ,USA:IEEE,2008:1101-1107.
[6]邹志峰,闫峰.机载光电侦察稳定平台系统分析[J].机械工程师,2007(4):39-40.
[7]WALDMANN J.Line-of-sight rate estimation and linearizing control of an imaging seeker in a tactical missile guided by proportional navigation[J].IEEE Transactions on Control Systems Technology,2002,10(4):556-567.
[8]SETOODEH P,KHAYATIAN A,FARJAH E.Backstepping-based control of a strapdown boatboard camera stabilizer[J].International Journal of Control,Automation and Systems,2007,5(1):15 -23.
[9]王文清.瞄准线捷联稳定原理及其应用[J].电脑开发与应用,1998,11(1):14-16.
[10]ALGRAIN M C,POWERS R M.Line-of-sight pointing accuracy/stability analysis and computer simulation for small spacecraft[C]//Proceedings of the 1996 SPIE Conference on Acquisition,Tracking,and Pointing X.Orlando,FL,USA:SPIE,1996:62-76.
[11]CHALONER C P,FARMAN M E,HARDIE A L.A balloon-borne 3-axis stabilised platform for large astronomy experiments[C]//Proceedings of the 8th IFAC Symposium on Automatic Control in Space.Oxford,England:[s.n.],1979:9 -17.
[12]KENNEDY R L.Direct versus indirect line of sight(LOS)stabilization[J].IEEE Transactions on Control Systems Technology,2003,11(1):3-15.
[13]张巍.三轴光学跟踪试验转台的动力学仿真研究[D].哈尔滨:哈尔滨工业大学,2006.
[14]周瑞青,吕善伟,刘新华.捷联式天线稳定平台动力学建模与仿真分析[J].北京航空航天大学学报,2005,31(9):953-957.
Dynamic model and analysis for vehicle mounted strapdown 3-axis stable platform
MAN Yi-ming1,2,JIANG Yan-hua1,HU Yu-wen1,CHEN Hui-yan1,GONG Jian-wei1,DING Zhu-shun2
(1.Intelligent Vehicle Research Center,Beijing Institute of Technology,100081 Beijing,China manyiming@163.com;2.Beijing Aerospace Control Instrument Institute,100854 Beijing,China)
To attain the coupling characters of vehicle-borne strapdown 3-axis stable platform,a complete kinematics and dynamics model of 3-axis stabilization platform system was achieved.Kinematics model analysis indicates that the main difference between strapdown stabilization platform and rate gyroscope stable platform lies in information acquisition and control mode.The rate gyroscope platform gets stability using hardware directly,while strapdown platform gets stability based on the software compensation.Dynamics model shows that the nonlinear cross coupling exists not only between vehicle body and gimbals of stable platform system,but also among gimbals each other.The coupling test not only validated the model,but also obtained the cross coupling boundary ranges of each gimbal,which affords a theoretical foundation for the further study of vehicle mounted strapdown 3-axis stable platform system.
strapdown stabilization platform;vehicle mounted platform;kinematics,dynamics
U666.1 U463.9
A
0367-6234(2011)09-0122-06
2010-04-02.
北京理工大学“985工程”资助项目(200540150).
满益明(1982—),男,博士研究生;
陈慧岩(1961—),男,教授,博士生导师.
(编辑 杨 波)
猜你喜欢
橡塑技术与装备(2021年12期)2021-06-24
汽车电器(2018年6期)2018-07-04
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
中学生数理化·中考版(2017年1期)2017-03-29
电力系统及其自动化学报(2016年5期)2016-12-01
火控雷达技术(2016年1期)2016-02-06
幼儿智力世界(2015年6期)2015-08-17
焊接(2015年1期)2015-07-18
焊接(2015年1期)2015-07-18
