济南市遥感影像的水体信息提取方法研究①
2011-07-18 03:49:46张勇,吉雅
全球定位系统 2011年6期
张 勇,吉 雅
(内蒙古测绘事业局,内蒙古 呼和浩特010020)
0 引 言
随着航空、航天技术、传感器技术、图像处理技术、计算机技术的飞速发展,遥感技术的发展也日新月异,遥感的应用领域越来越广,技术手段越来越先进[1]。随着空间遥感技术的发展及其应用的广泛深入,人们对遥感专题信息的提取方法也在不断地改进,经历了目视解译、自动分类、光谱特性的信息提取及光谱与空间特征的专题信息提取等多个阶段[2-3]。图像融合是以图像为主要研究内容的数据融合技术,是把多个不同模式的图像传感器获得的同一场景的多幅图像或同一传感器在不同时刻获得的同一场景的多幅图像合成为一幅图像的过程。由于不同模式的图像传感器的成像机理不同,工作电磁波的波长不同,不同图像传感器获得的同一场景的多幅图像之间具有信息的冗余性和互补性,经图像融合技术得到的合成图像则可以更全面、更精确地描述所研究的对象[4]。利用卫星遥感数据提取专题信息在近20年来得到广泛的研究,例如:刘建波和戴昌达利用密度分割法从TM图像中提取水体的分布范围[5];陆家驹和李士鸿分别用阈值法、色度判别法、比率测法TM图像中识别水体[6];昝梅和陈冬花利用Erdas软件对卫星影像数据进行精校正、融合、增强等处理,在建立解译标志的基础上采用人机对话的方式,对巩留林场森林资源进行了调查[7];丁娟,徐跃通,杨燕杰,刘玉华等利用Erdas和Arc/Info软件对矿区遥感影像信息提取进行了研究,结果表明由于航片分辨率高、控制点选取合理以及解译工序的合理安排,解译精度较高[8]。都金康,黄永胜,冯学智,王周龙等对spot卫星资料识别水体问题进行了研究,提出了基于spot影像的决策树水体识别技术,研究发现该方法可以很好地去除山体阴影[9]。从前人的研究中可知:由于遥感图像的类别不同以及研究地区的地面特征不同,同一方法不可能适用于所有情况。因此,对济南市地区的特点、影像特征以及水体的遥感信息机理等方面进行了综合分析研究,提出了济南市水体识别技术。
1 研究区概况
济南市位于山东省的中西部,北纬36°40′,东经117°00′,地势南高北低,依次为低山、丘陵、平原,南依泰山,北临华北平原。济南境内河流主要有黄河、小清河两大水系,湖泊有大明湖、白云湖等。济南市区分为历下区、市中区、槐荫区、天桥区、历城区,面积大约为1 897km2,是中国历史文明的泉城。济南市属于暖温带半湿润大陆性季风气候区,夏季炎热多雨,冬季寒冷干燥;区内农业类型是为城市服务的复合式农业,以种植粮菜、林果为主;工农业非常发达,但分布不平衡;济南市内建筑物逐渐增多,城区扩大,地面固化面积增大;矿山开采、开荒种地,使地表裸露,植被覆盖减少等等[10]。
2 遥感专题信息提取原理
充分利用卫星遥感能够动态地与周期性地获取地表信息的特点,从卫星数字图上逐步实现地学专题信息的自动获取,是GIS中数据采集自动化研究的一个方向,同时又是遥感信息定量化的一个方面,实现图像解译的自动化与高精度定量化,不仅是遥感应用领域发展的要求,而且是当前遥感自身发展的前沿。为此,将水体信息提取方法技术流程进行细化,为其他专题信息的获取提供理论基础。
3 水体信息提取流程
3.1 影像融合
图像融合就是将同一区域的多源遥感图像按统一的坐标系统,通过空间配准和内容复合,生成一幅比单一信息源更准确、更完全、更可靠的新图像的技术方法。其优点是提高了影像的空间分解力,提高影像的平面测图精度、分类精度、可靠性,增强了影像的解译和动态监测能力,有效地提高遥感影像数据的利用率[11]。
常用的融合方法有如下三种:主成分变换、乘积变换、比值变换和小波变换融合。通过比较不同融合方法的融合结果发现:主成分变换最大地保持了信息量;以4,1,2波段做比值法融合,结果为模拟自然色影像,目视效果逼真,在影像出图时不需要调整色彩,缺点是融合后影像缺少一个波段信息;乘积变换融合可以使色彩保持不变;小波变换融合结果图像灰度均值非常接近原多光谱图像[12]。可以对同一景影像进行多次试验,从中选择融合效果清晰、自然色彩逼真的影像,保证正射影像图的质量[13]。
具体操作流程是将SPOT和Landsat ETM+卫星影像数据导入到ERDAS IMAGINE系统中,形成IMG文件。由于SPOT和Landsat ETM+的分辨率不同,加之研究过程中需要进行融合工作,所以首先要对影像文件进行坐标精纠正。具体融合的过程如下:ERDAS图标面板菜单条:Main→Image Interpreter→Spatial Enhancement→ResolutionMege→Resolution Merge对话框[14]。图1示出融合后影像,图2示出原影像。
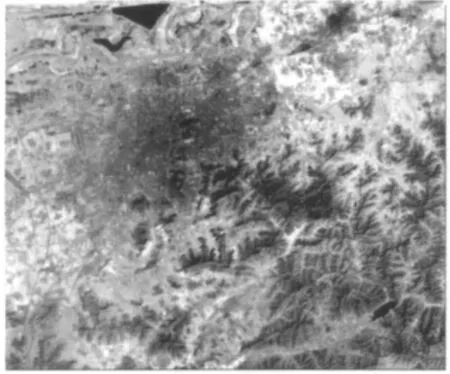
图1 融合后图像

图2 原影像
3.2 非监督分类
3.2.1 原理
非监督分类按照特征矢量在已选择的特征空间中以类别集群的特点进行分类。非监督分类中常用的方法是聚类法。距离的计算通常采用欧几里德距离即几何直角空间里两点的直线距离。在实际作聚类时,有时经过多次迭代还不能停止,有时由于数据本身的聚类特性不太好,类别重叠,或一些零散点远离各个聚类中心,或过少的点自成中心等,这些都会影响聚类结果。因此常规定一些附加的约束,以提高分类质量。这些约束主要有:
1)设置一个拒绝类:如果这些点距离各类中心都很远,则属于拒绝类而不被分到某一类中。设拒绝参数为T距,dij为最小距离,且dij>T距,则xj属于拒绝类。
2)类合并:当两个聚集中心过近时,将其并为一类。设距离合并参数为T合1,如果两类均值距离小于或等于T合1,两类合并成一类;若两类均值距离大于T合1,则保留这两类。另一种情况,当分到某一类的像元数过少时,去掉此类合并到最近的类别中去。设数目合并参数为T合2,计算分类后每类像元数占总像元数的百分比,若百分比小于或等于T合2,寻找距这一类均值距离最近的类别合并;若百分比大于T合2,这一类保留。类别合并后,需要重复计算各类均值矢量。
3)类分裂:有时数据在特征空间某些方向上分布过宽或分布过密,在这一类别中可能不止一个集群中心,这时可以作进一步的分裂。办法仍是检查每一类的像元总数占各类像元总数的百分比。设定一个百分比阈值作为分裂与否的参数T分,如果所求百分比中,某值大于或等于这一参数,则对应分的类别将被分裂,否则被保留。如果这一类被分裂,要选定两个新的聚类中心。首先计算类别均值矢量 M=(m1,m2...mn)T,以及标准差矢量S=(σ1,σ2...σn)T,则规定新的聚类中心为

上述方法也称为迭代自组织数据分析或动态聚类(ISODATA)方法。
3.2.2 具体实现过程
1)在ERDAS面板工具条中点击Classifier图标,选择Classification菜单下的Unsupervised Classification菜单项,打开Unsupervised Classification对话框;
2)确定输入文件(Input Raster File):即经过几何校正处理后所得的图像,确定输出文件(Output File):即分类后产生的图像,选择生成分类模板文件:Output Signature Set(将产生一个模板文件),确定分类模板文件(Filename),对Clustering Options选择Initialize from Statistics,单选框Initialize from Statistics指由图像文件整体的统计值产生自由聚类,分出类别的多少由用户自己决定,在这里我们确定初始类数(Number of classes)为6,即分出6个类别点击Initializing Options按钮可以调出File Statistics Options对话框以设置ISODATA的一些统计参数。点击Color scheme Option按钮可以调出Output Color scheme Option对话框以决定分类的图像是彩色的还是黑白的,这里选择Approximate true color,即生成彩色图像。定义最大循环次数 Maximum Iterations:24.最大循环次数是指ISODATA重新聚类的最多次数,这是为了避免程序运行时间太长或由于没有达到聚类标准而导致死循环。设置循环收敛阈值(Convergence threshold):0.95.收敛阈值是指两次分类结果相比保持不变的像元所占最大百分比,此值的设立可以避免ISODATA无限的循环下去;
3)点击OK,进行非监督分类,得到一个分类结果,如图3所示。

图3 分类后的图像
3.3 水体提取
卫星遥感影像记载了地物对电磁波的反射信息及地物本身的热辐射信息。各种地物由于其结构、组成及理化性质的差异,导致其对电磁波的反射及本身的热辐射存在着差异。天然水体对0.4~2.5μm电磁波的吸收明显高于绝大多数其它地物。因而水体的总辐射水平低于其它地物,在彩色遥感影像上表现为暗色调。在红外波段,水体吸收的能量高于可见光波段,即使水很浅,水体也几乎全部吸收了近红外及中红外波段内的全部入射能量,所以水体在近红外及中红外波段的反射能量很少,而植被土壤在这两个波段内的吸收能量较小,且有较高的反射特性,这使得水体在这两个波段上与植被和土壤有明显的区别。反映在影像上,水体呈现出暗色调,而土壤植被则相对较亮。因此,选用一个合适的近红外波段,定出水体的阈值,将低于该值的像元定为水体,高于该值的像元则为非水体,这样就可很容易地把水体与其它地物区分开来:但在山区,由于山体阴影的影响。使得阴坡在红外波段的反射能量特别低,在图像上同样呈现暗色调。水体的提取可按以下步骤来完成,具体提取的过程是将融合后的图像做非监督分类,用Viewer菜单栏将处理后的图像打开处理。具体操作过程如下:ERDAS图标面板菜单条:Classifier→Unsupervised Classification;Viewer→Raster→Attributes对话框。图4示出提取水体和阴影后的图像。

图4 提取水体和阴影后的图像
仔细观察上一步的提取结果,发现多提的阴影可以分成两大类,一类是在建筑物密集的城市及城镇地区,由于大量的高建筑物造成的建筑物阴影,一类是由于丘陵等地形高差引起的地形阴影。为了将所提的水体中的建筑阴影去掉,将水体及阴影重采样。将分离阴影后的水体与从阴影中提取的水体叠加,再叠置在由B2,B3,SWIR组合的彩色合成图像上,发现水体被准确提出,几乎没有山体阴影,也没有水体被漏提。基于上述理论和分析,将提取的水体转成ArcView的shape格式,利用其字段的计算功能计算每个水体图斑的面积、周长和形状指数k,通过和遥感影像对比分析,就很容易的将各种水体区分出来。
4 结 论
1)在对遥感影像进行融合时,应注意配准精度或精纠的精度对影响融合结果的影像;根据研究目标选择融合模型的原则;多光谱影像的波段之间有着一定的关联性,根据需要,选择最佳波段来融合的原则。
2)在山区由于阴影的影响,单一方法往往无法将水体有效地提取出来。依据利用光谱信息法对不同类型的水体其面积、周长、形状等几何特征特点水体与地貌类型之间的关系的特点,采用重采样的方法就可以有效地提取水体。
3)水体信息的提取可以作为其他遥感影像信息提取的理论基础。
[1]肖 潇.论ERDAS等软件在专题地图中的应用[J].江西测绘,2007(增刊):56-58.
[2]杜云艳,周成虎.水体的遥感信息自动提取方法[J].遥感学报,1998,2(4):264-269.
[3]吴兆福,高 飞,宫 鹏.边缘叠加遥感影像数据融合[J].工程勘察,2005(2):46-49.
[4]林 卉,杜培军.基于小波变换的遥感影像徽合与评价[J].计算机应用,2005(4):6-9.
[5]刘建波,戴昌达.TM图像在大型水库库情监测管理中的应用[J].环境遥感,1996,11(1):53-58.
[6]陆家驹,李士鸿.TM资料水体识别技术的改进[J].环境遥感,1992,7(1):17-23.
[7]昝 梅,陈冬花.ERDAS IMAGIN软件在森林资源调查中的应用——以巩留林场为例[J].新疆师范大学学报·自然科学版,2006,25(3):178-182.
[8]丁 娟,徐跃通,杨燕杰,等.基于Erdas和Arc/Info的矿区遥感影像信息提取技术[J].矿业研究与开发,2008,285(3):43-45.
[9]都金康,黄永胜,冯学智,等.SPOT卫星影像的水体提取方法及分类研究[J].遥感学报,2001,5(3):214-219.
[10]冯海霞,高守英.济南市土地利用动态监测分析[J].国土资源科技管理,2004:72-74.
[11]马友平,冯仲科,何友均,等.基于ERDAS IMAGINE软件的快鸟影像融合研究[J].北京林业大学学报,2007,29(增刊2):181-184.
[12]张黎宁,周 宇.SPOT5全色与多光谱图像融合方法研究[J].南京林业大学学报·自然科学版,2007,37(4):89-92.
[13]刘善伟,万剑华,张 杰,等.任广波.基于ERDAS的SPOT5卫星影像正射校正方法研究[J].海洋测绘,2008,28(4):30-33.
[14]胡如忠.中巴地球资源卫星及其应用[M].全国地方遥感应用协会,2003:286-288.
猜你喜欢
建材发展导向(2022年2期)2022-03-08 01:43:38
建材发展导向(2021年14期)2021-08-23 00:57:44
文苑(2020年11期)2020-11-19 11:45:11
中国诗歌(2019年6期)2019-11-15 00:26:47
电子测试(2017年15期)2017-12-18 07:19:27
中国环境监察(2017年3期)2017-05-14 06:19:02
中学生数理化·八年级物理人教版(2017年11期)2017-04-18 11:22:54
数学大王·中高年级(2016年4期)2016-05-14 12:56:02
智能系统学报(2015年4期)2015-12-27 09:38:39
电子设计工程(2015年6期)2015-02-27 12:04:53