
不同类型GPS接收机天线观测结果分析①
2011-07-18 03:49王小瑞程传录
全球定位系统 2011年6期
王小瑞,程传录
(国家测绘局大地测量数据处理中心,陕西 西安710054)
0 引 言
随着GPS定位精度的提高和技术的完善,GPS技术已成为大地坐标系统建立与维护;及基础地理信息获取与更新的主要技术手段。国内外GPS测量仪器种类不断增加,目前有TRIMBLE、LEICA、TOPCON、ASHTECH、NOVATEL、THALES、SOKKIA、南方、中海达、华测及合众思壮等GPS测量仪器,GPS测量仪器种类的增加推动了GPS技术的广泛应用。由于GPS天线相位中心不一致性,造成不同仪器定位结果的差异,针对不同类型GPS仪器和天线进行实验、计算、分析和比较。
1 天线相位中心及改正模型
无线电天线发射或接收信号的那一点被称为天线相位中心,GPS接收机所采集到的观测值就是相对于这一点的。天线相位中心并非固定不变,而是随所接收信号的高度角、方位角和信号强度等变化而变化,这被称为天线相位中心变化(PCV)[1-2]。天线相位中心变化通常为数个毫米,对于某些类型的天线,可能达到数厘米。天线相位中心变化对基线解算结果所产生的影响,可以采用模型改正的方法来加以消除[1]。
虽然天线相位中心与信号的高度角、方位角和信号强度都有关,但由于测试成本比较高,因此,现有的改正模型仅考虑了高度角因素。测定相位中心变化的方法是:采用多项式对L1和L2的单残差进行拟合,得出由于相位中心随高度角变化而引起的观测值的变化[1]。利用此方法所确定出的天线相位中心变化被称为相对的相位中心变化。常用的天线相位中心改正模型由两部分改正构成:天线平均相位中心位置(也常被称为天线相位中心偏移[3],该参数由天线生产厂商提供);与信号高度角有关的相位中心变化而引起的载波相位观测值的改正。
常用的天线相位中心改正模型是由国际全球导航卫星服务(IGS)组织所发布。对于不同的GPS天线,其相位中心改正模型不同。IGS给出了国外主要GPS厂商生产的天线相位中心改正模型,而国产天线的相位中心改正没有经过专门部门的检测和公布,所以,缺少改正模型。这导致了使用国产天线观测结果与国外天线观测结果在垂直方向上存在一定差异。
IGS公 布 的 GPS天 线 TRM39105.00(TRMZEP)的天线相位中心改正模型,该数据来自GAMIT软件的天线相位中心改正模型文件antmod.dat[2],如图1所示。前两行为注释行,第一行表明:天线高度角改正在0°~90°之间,步长为5°;第二行表明:天线名称、载波名称、U方向、N方向、E方向等信息;下面四行为改正模型参数,第三行表明:L1载波的U、N、E方向的改正量;第四行为高度角0~90°的以5°为步长的相位中心改正。

图1 天线相位中心改正模型文件
2 不同仪器结果与分析
为了比较分析不同类型GPS接收机天线的性能,使用国外天线:天宝5700(EPHYR GEODETIC、EPHYR)、天宝 R8MODEL 2、天宝 R6、天宝R4、拓普康Hiper Ga和国产天线:南方灵锐S82、达恒LV2、华测X91仪器及对应天线在8个测站点上于2011年1月19、27、28、29日进行了GPS观测,每天观测两个时段,时段长度2.5~3.5小时左右。表1示出了不同天线在不同点位的观测时段数。

表1 测站点观测时段统计(#代表测站号)
1)数据处理方案
数据处理采用GAMIT/GLOBK软件。利用国际GPS服务跟踪(IGS)精密星历,估计卫星钟差、接收机钟差、电离层与对流层延迟、卫星和接收机天线相位中心等各种改正[2,3],以北京房山、西安、郑州、盐池4个IGS站为框架点,选择ITRF97参考框架、2 000.0参考历元进行数据处理。
主要参数设置:
卫星轨道:IGS精密星历,且固定;
卫星截至高度角:10°;
数据采样间隔:15s;
对流层改正模型:采用Saastamoinen模型进行标准气象改正[2];
观测值:采用消除电离层后的组合观测值[2];
坐标约束:GPS连续运行参考站水平方向给予5cm、垂直方向给予10cm的约束,其它GPS站给予10m的约束;
数据解算模式:周跳自动修复技术[2]。
2)不同类型GPS接收机天线观测结果精度统计
按照以上处理方案,对各种天线观测数据进行处理。对同一天线在同一点位的多时段解进行综合平差,得到平差之后的点位坐标及其点位精度。如表2所示。(平差过程和文件配置参照参考文献[4])。
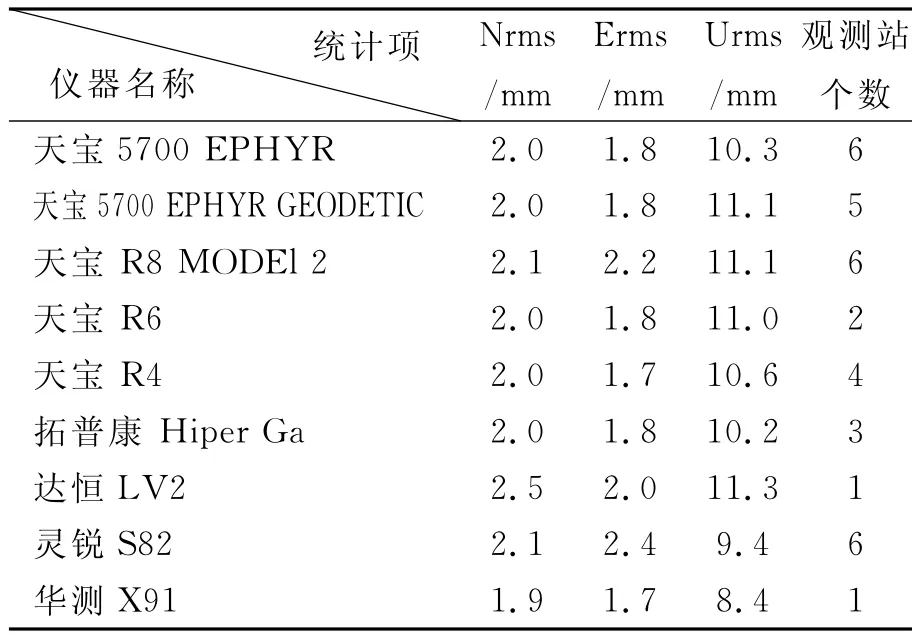
表2 不同天线观测结果精度统计
由表2可知,使用不同类型GPS接收机天线进行观测,对观测结果精度影响不明显,测站点平面精度较好,高程精度较弱。
3)同类型GPS接收机天线观测结果比较
为了便于分析,首先选择国外的天线的观测结果作为基准进行比较。由于天宝R8MODEl 2和天宝5700EPHYR两种仪器上站次数较多,其天线相位中心改正模型完善,以这两种仪器结果为基准,其它天线在同一点位的观测结果分别与这两种天线的观测结果在N、E、U三个分量上比较,其差异结果如表3、表4所示。
由表3和表4可知,不同类型GPS接收机天线观测结果平面差异较小,高程差异较大;国外天线在U方向差异较小,基本都在2cm之内;国内天线在U方向上与该两种天线差异较大,基本都在4cm以上。
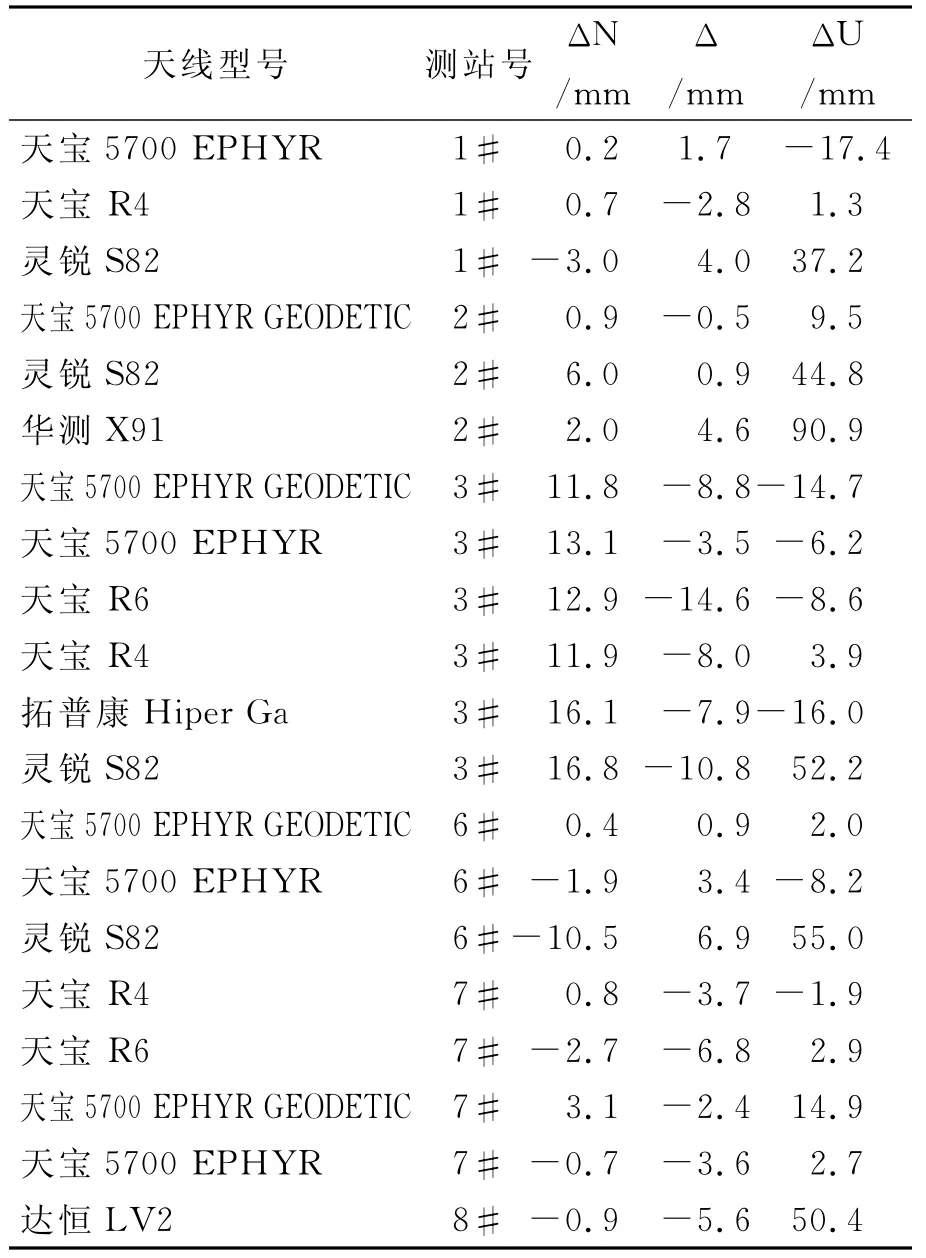
表3 不同天线观测结果与‘天宝R8MODEl 2’比较
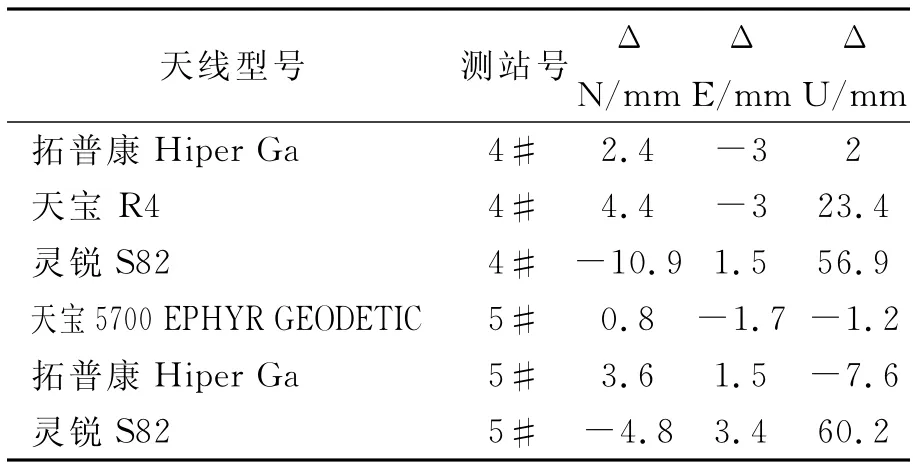
表4 不同天线观测结果与‘天宝5700EPHYR’比较
国内外仪器在U方向差异的主要原因是由于国产GPS天线没有相位中心改正模型,在数据处理过程中,我国仪器没有附加天线相位中心改正,这种相位中心的改正的缺失就在U方向上体现出差异。所以,影响高程差异的主要原因是不同GPS的接收机天线相位中心改正模型不同。
为了进一步比较各种天线之间的观测差异情况,对各个不同天线在同一点位的结果进行了比较,由于数据量太多,在此不再赘述。其差异情况与以上比较的结果趋势相同,国外天线在高程方向的差异较小,国产天线与国外天线的差异较大。
3 结 论
通过以上比较分析,可得知:
1)使用不同的GPS接收机天线进行观测,对观测结果精度影响不明显,平面精度比高程精度稍好;
2)不同GPS接收机天线观测结果,平面差异较小,高程差异较大,影响高程差异的主要原因是不同的GPS接收机天线相位中心改正模型不同;
3)国产GPS接收机天线相位中心改正模型目前还没有,在数据处理时无法进行改正。
4)为了避免不同GPS接收机天线对观测结果高程方向的影响,在同一个网中最好使用相同的GPS接收机天线进行观测,这样可以消除天线相位中心改正的影响。
[1]李征航 黄劲松.GPS测量与数据处理[M].武汉;武汉大学出版社,2005.
[2]HERRING T A,KING R W,MCCLUSKY S C.Documentation for the GAMIT GPS analysis software[M].Department of Earth,Atmospheric,and Planetary Sciences Massachussetts Institute of Technology,2006.
[3]ROLF D,URS H,PIERRE F,et al.Bernese GPS software version 5.0[M].Berne:Astronomical Institutes of University of Berne,2007.
[4]MIT.Global Kalman filter VLBI and GPS analysis program(GLOBK),ver 10.0[R].2000.
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代仪器与医疗(2022年3期)2022-08-12
现代仪器与医疗(2022年2期)2022-08-11
成都信息工程大学学报(2022年2期)2022-06-14
导航定位学报(2022年1期)2022-02-17
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
百科探秘·航空航天(2017年12期)2018-01-31
中国交通信息化(2017年10期)2017-06-06
电子制作(2016年1期)2016-11-07
