
BPL时号定时校准原理和方法
2011-06-28 06:23车爱霞
时间频率学报 2011年1期
车爱霞
BPL时号定时校准原理和方法
车爱霞
(中国科学院国家授时中心,西安 710600)
为保证BPL长波授时时号(以国家授时中心(NTSC)保持的UTC(NTSC)为基准)的准确度,必须对该时号进行定时校准(确定发射时号与发播工作钟同步时定时校准信号的相位)。阐述了定时校准的原理和方法。与传统罗兰-C系统校准方法不同,该方法选择发射天线电流取样信号基准过零点而非定时控制单元基本定时信号为定时校准点,消除了因锁相控制精度不足引起的误差,提高了时号精度。该方法可以作为罗兰-C授时系统的通用校准方法。
BPL时号;定时校准;时号改正数
BPL长波授时由中国科学院国家授时中心(NTSC)承担,发射台位于陕西省蒲城县境内。该长波授时系统始建于20世纪80年代初期,采用罗兰-C脉冲发射体制,载频100kHz,时间基准为NTSC本部(位于临潼)保持的协调世界时UTC(NTSC)。2006年,BPL长波授时系统现代化技术改造工程启动。2009年元月,改造后的新系统开始试运行。
改造后的BPL长波授时系统采用固态发射机代替了电子管发射机;增加了数字调制发播功能,发播时码和时号偏差等信息,实现了BPL自主授时;发播台的工作钟与UTC(NTSC)的远程比对由微波单向法变为微波双向和GNSS共视法2种方式;发播工作钟的控制由软件自动完成,发播工作钟与UTC(NTSC)之间的同步精度实际达到±15ns。这种情况下需要做好发射时号定时校准工作,进一步提高时号精度,并向用户提供准确的时号改正数。
1 BPL授时控制过程简介
改造后新的BPL授时控制过程简图见图1。

图1 BPL授时过程简图
微波双向和GNSS CV系统建成后,通过车载搬运钟完成了各自链路的时间比对校准[1]。系统运行中,以微波双向链路为主、GNSS CV为备用链路,(PU)与(NTSC)的时间比对、(PU)相对于(NTSC)的钟差和频偏计算以及(PU)相位和频率控制,均由软件自动完成,从而保持(PU)与(NTSC)同步在规定范围内[2]。
定时控制设备以(PU)为参考,产生发射机的基本定时信号0和与0同步的触发脉冲序列,触发发射机主机产生载频为100kHz的BPL脉冲序列,馈送给发射天线,辐射出BPL时号。在发射天线底部地回路用电流环耦合产生天线电流取样信号,反馈给定时控制设备,由定时控制设备检测该取样信号基准过零点相位(正相位编码的发射天线电流脉冲中最接近30μs点的正向过零点或负相位编码脉冲中最接近30μs点的负向过零点)[3-4],通过锁相环路使基准过零点锁定到0,以补偿各种原因引起的发射通道延迟变化。0是与天线电流取样信号基准过零点同步的脉冲信号。
时差比对监测系统实时监测0与(PU)的时差Δ,超差时自动报警,保证发射机输出信号稳定准确。
根据时差比对监测结果和钟差计算结果,软件自动计算时号改正数,然后系统通过对罗兰-C脉冲进行数字调制将实时计算的时号改正数播发给用户[5]。
BPL授时系统各信号之间的时间关系如图2所示。图2中,a为发射天线馈电点电流信号脉冲起点,是BPL发射天线发射信号的时间参考点;=(NTSC)-a,即时号改正数;g为发射机输出端电流信号脉冲起点;Δ1是信号从发射机输出端传递到发射天线馈电点的时间延迟;a表示到达用户接收天线处的电磁信号脉冲起点;r表示用户接收机解调输出信号脉冲起点;t表示时号从发射天线到接收天线处的传播延迟;r表示包括接收天线、馈线和接收机在内的接收系统延迟。
由于a对应罗兰-C脉冲起点,0起点对应从发射机输出端取样后反馈到定时控制设备的罗兰-C脉冲30μs处相位。Δ2包括天线电流信号取样延迟、取样信号反馈时延、相位检测及0脉冲成形延迟,还有从脉冲起点到载频第3周末的30μs延迟。在BPL发射台,Δ2远大于Δ1,所以0滞后a。
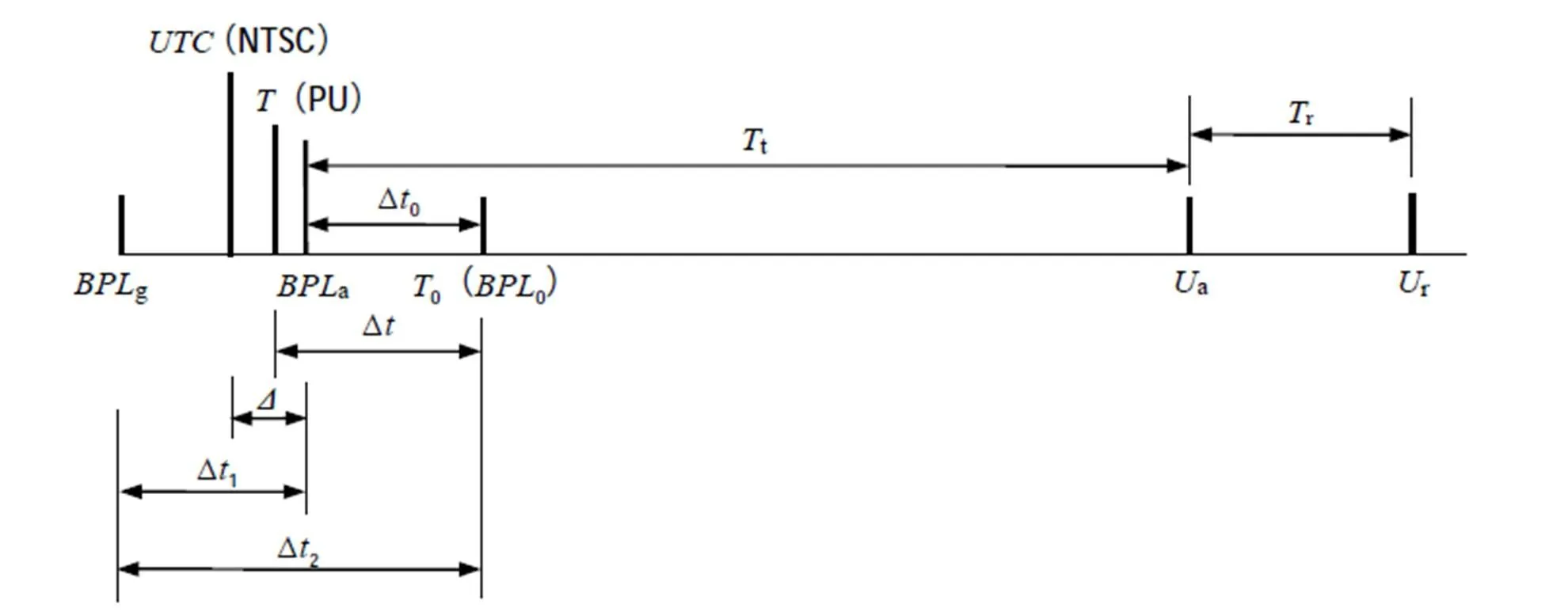
图2 BPL授时系统时间关系示意图
注:双箭头线长度与实际时差没有固定比例关系
由图2可得
(NTSC)-r=t+r+(1)
2 BPL时号定时校准信号的选取
由于发射天线电流信号相位无法直接监测,BPL发播台必须选择适当的信号作为定时校准信号。确定(PU)-a=0时定时校准信号相位的过程就是时号定时校准。
原BPL系统由两部电子管发射机互为主备工作,定时控制设备也设一主一备,以基本定时信号0作为定时校准信号。0相位不可调,0与(PU)保持固定相位关系。受锁相控制精度影响,当定时控制设备发生变化,更换发射机或更换器件、模块等引起环路时延变化时时号相位会突跳,最大跳变近300 ns。只有调整(PU)相位才能予以修正,而这是系统不允许的。这使系统校准精度和时号精度只能做到几百纳秒。
新的BPL系统同样存在锁相控制回路不能准确补偿发射通道时延变化的问题,若以0作为定时校准信号,当系统局部硬件变化时除非重新进行时号定时校准,否则不能保证时号准确度。而系统局部硬件变化在运行中是频繁、随机出现的,这给系统运行带来不便。
实际上,对罗兰-C授时,系统建成后发射天线和馈管是相对稳定的部分,图2中的Δ1可以认为是常数,那么天线地电流取样信号的某个相位点作为定时校准点是最为恰当的。与原系统不同,改造后的BPL系统0相对于(PU)的相位可调,调整分辨率优于10 ns,所以选择脉冲信号0起点作为定时校准点。当系统硬件变化时,通过调整0保证0相对于(PU)相位不变,天线电流信号相位就保持不变,BPL时号精度得到提高。
由图2可知,(PU)-a=0时,(PU)-0=Δ0。时号定时校准就是确定0相对于(PU)的相位即确定Δ0。Δ0称为标准控制时差。
3 BPL时号定时校准原理
由图2可以看出
(NTSC)-0=Δ0+(2)
(1)、(2)式相减得:
0-r=t+r-Δ0
即 Δ0=t+r-(0-r) (3)
可见,若已知BPL时号到某一接收点的t、该点接收系统时延r及其r与发播台0的时差,可以确定发播台标准控制时差Δ0,完成BPL时号定时校准。对于这方面工作,国家授时中心临潼本部设立的BPL监测站是最为理想的选择。
BPL发播台自动监测((NTSC)-(PU))和((PU)-0),BPL监测站连续监测((NTSC)-r)值,因此易于得到(3)式中的(0-r)。由于季节、温度、湿度、空间电磁环境等因素的变化,不同时间得到的(0-r)值可能不完全一致。时号定时校准时应取一定时间段内的平均值,以提高时号校准精度。
新的BPL系统采用固态发射机,定时控制设备设置热备份,天线电流取样信号基准过零点的备份检测设备也输出基准过零点脉冲(与0相关),但不参与时号控制。这样,当天线电流取样信号反馈回路或主用基准过零点检测设备发生变化时,可以参考备份基准过零点脉冲相位确定时号相位变化量,修正相应的标准控制时差Δ0,大大简化重新校准过程。
电波传播延迟t的测定较为复杂,国家授时中心根据电波传播理论和实测取得了一个电波传播延迟的数据库,BPL定时校准时可直接采用。
BPL定时接收系统时间延迟r的测定较为复杂,一般的接收机厂家在接收机出厂前会给出接收系统延迟值,但准确度难以保证。在BPL定时校准中,需准确测定所用接收机的系统时延。
4 BPL时号改正数
实际运行中,(PU)不可能随时与(NTSC)严格同步,Δ也不可能总保持为Δ0,时号误差在所难免。改造后的BPL系统除了通过授时电文播发实时时号改正数外,NTSC《时间频率公报》表A事后刊发时号改正数。
由图2不难看出,改造后的新系统的BPL时号改正数可用下式计算:
=((NTSC)-(PU))+(((PU)-0))-Δ0(4)
5 结语
为保证BPL发射时号准确度,发播台必须选择适当信号作为定时校准信号并完成时号定时校准。改造后的BPL授时系统选择与天线电流取样信号基准过零点同步的脉冲信号0作为定时校准信号,提高了时号精度。利用国家授时中心本部设立的BPL监测站接收系统时间延迟测定结果和监测接收数据、发播台监测数据、电波传播延迟测定结果等可以完成BPL时号定时校准。BPL授时发播台连续监测定时校准信号相位,并实时计算时号改正数。时号改正数由授时电文播发给用户,同时事后刊发于《时间频率公报》表A。
[1] 车爱霞. 微波时间传递精度和时延分析[J]. 时间频率学报, 2009, 32(1): 12-17.
[2] 车爱霞, 段建文, 魏孝峰, 等. 升级改造后的BPL时频监控系统[J]. 时间频率学报, 2010, 33(2): 134-139.
[3] DC 20593-0001 (202) 267-0990 COMDTINST M16562.4A. Specification of the transmitted LORAN-C signal(S).
[4] GB/T14379—93. 罗兰系统通用技术条件(S).
[5] 段建文, 王玉林. BPL时码发播和自主授时方法[J]. 时间频率学报, 2008, 31(2): 98-103.
Principle and method for timing calibration of BPL time signal
CHE Ai-xia
(National Time Service Center, Chinese Academy of Sciences, Xi’an 710600, China)
In order to guarantee the accuracy of BPL time signal, which is referred to UTC(NTSC) kept by the National Time Service Center(NTSC), it is necessary to calibrate the time signal, i.e., to determine the phase of timing calibration signal while the transmitted time signal is synchronized with the working clock for transmission. The principle and method for calibrating BPL time signal are demonstrated. Differing from the conventional calibration method, the standard zero crossing of the emission antenna current signal, instead of the basic timing signal of the timing control unit, is selected to calibrate the time signal in this method, so that the error caused by the deficiency of the accuracy of phase-locked control loop is eliminated and the precision of BPL time signal is improved. This method could be used as a general method for time signal calibration of Loran-C system.
BPL time signal; time calibration; correction to
P127.1
A
1674-0637(2011)01-0023-04
2010-09-07
中国科学院大科学装置维修改造项目
车爱霞,女,研究员,主要从事时间频率发播控制及相关技术研究。
猜你喜欢
数理化解题研究(2020年13期)2020-05-07
数学物理学报(2019年5期)2019-11-29
电子制作(2018年9期)2018-08-04
电子制作(2018年12期)2018-08-01
中国交通信息化(2017年10期)2017-06-06
电子制作(2016年1期)2016-11-07
学习月刊(2016年19期)2016-07-11
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年3期)2016-01-15
现代防御技术(2014年6期)2014-02-28
