基于图像处理的高速公路汽车防追尾系统研究
2011-06-26 06:10吴翠娟章磊费树岷
电气自动化 2011年6期
吴翠娟 章磊 费树岷
(1.苏州经贸职业技术学院 机电系,江苏 苏州 215009;2.东南大学 自动化学院,江苏 南京 210096)
0 引言
汽车追尾是高速公路恶性交通事故主要形式之一,往往造成巨大的财产损失和人身伤亡。本系统的关键技术是前方车辆图像与主车之间距离的测量,即利用视觉图像方法实时获取车辆周围相关物体位置及与主车的相对距离。通过安装在车辆前部的摄像机,对出现在车辆安全距离内的前方各车辆的图像进行跟踪处理和持续测距,当车距在危险范围时,给出警示信号,提醒驾驶员注意保持车距,有效预防追尾事件的发生。
图像测距的一般步骤有目标识别、目标跟踪和目标测距三部分。目标检测和目标跟踪是限制图像测距方法实时性的主要因素;而目标测距的算法对测量精度有直接影响。
系统的结构框图如图1所示。

图1 系统的结构框图
1 汽车前方图像采集与预处理
1.1 前方图像采集
汽车前方图像是通过安装在汽车前方的CCD(Charge-coupled Device)摄像机采集到的。
CCD摄像机具有灵敏度高、抗强光、畸变小、体积小、寿命长、抗震动等优点,适合安装在行驶的汽车上。由于汽车在行驶过程中的光线随白昼、早晚时间、天气等影响的变化较大,因此需选用自动光圈镜头的CCD摄像机,以便能实现画面亮度的自动调节,获得良好的较为恒定亮度的图像画面。
1.2 图像的预处理
为了提高系统对图像的分析和识别能力,减小图像受光线、天气等环境因素的影响,需要对图像进行必要的预处理。即有选择地突出图像中的某些感兴趣特征,衰减图像中不需要的某些特征。对汽车前方图像的预处理过程中包括:图像灰度化、图像平滑、图像边缘检测和二值化处理等。
CCD摄像机采集到的图像是彩色图像,若直接对彩色图像进行处理的话,耗时较多。因此,需对原始图像进行图像灰度化处理,将彩色图像转换成灰度图,以加快系统的处理速度,满足系统实时性的要求。
图像平滑目的对图像进行滤波处理,以减小原始图像噪声对后续的路面区域确认和汽车目标识别造成的影响。本系统采用高斯平滑滤波,可以较为有效地进行道路图像平滑滤波的处理。
图像边缘检测就是检测出物体的轮廓或物体不同表面之间的交界。图像的边缘是图像的最基本特征,是图像分割所依赖的重要特征。图像边缘表现为图像上的不连续性,大范围内的不连续性即成为边界。这种不连续性可以利用求导数方便地进行检测。本系统采用局部差分算子找边缘的Roberts算子,使边缘检测连续性较好。其算法[1]表达式如公式(1)所示

式中f(x,y)是原始图像,g(x,y)为图像边缘。
二值化处理就是将灰度化后的灰度图像,转化为黑白二值图像,以便进一步减少影响图像处理效果的噪声[2]。选取最优阈值k,按照公式(2)可将边缘灰度图像转化为黑白二值图像。

式中k是选取的黑白图像最优阈值,255是最大灰度等级。
2 前方车辆识别
2.1 感兴趣路面区域的确定
由于道路平面一般有明显的边缘或车道线标志,且这些标志性边缘一般来说都是平行直线,而两条平行线在图像无限远处会相交,也就是会产生消隐点,即使有弯道存在,也可以分段进行直线拟合。因此在采集的图像中,就可以认为边缘形成的两条线和消隐点交汇区域为我们所感兴趣的路面区域,我们要进行的前方车辆检测就在此区域内进行的。
2.2 前方车辆识别
本系统中前方车辆的识别是基于灰度梯度的原则。高速公路的路面一般来说是较平滑的标准路面,因此在图像中本车与前方车辆之间的区域的灰度变化比较平缓,但在路面和车辆的相交处,由于车辆底部水平阴影线和保险杠等的存在,灰度图像会形成灰度由亮到暗灰度梯度变化明显的水平边缘,检测到此灰度变化较大的边缘,就可以认为检测到了车辆的下边缘,从而识别出前方车辆。
前方车辆识别的具体算法是:在高速公路的路面左右车道线确定的感兴趣区域内,沿着水平方向自下而上逐行进行灰度扫描,并根据扫描结果计算出每行灰度的平均值。灰度平均值发生灰度梯度急剧变化的行,就认定为前方车辆的下边缘。在整个感兴趣路面区域内没有灰度均值突变时,则认为当前车道内没有车辆。灰度平均值G(r)按照公式(3)计算[2]。

式中:rb(r)为感兴趣路面区域中第r行的左坐标;lb(r)为感兴趣路面区域中第r行的右坐标;f(r,c)为像素(r,c)的灰度值。
3 前方车辆跟踪
对于目标图像的跟踪提取技术,常用的方法有以下几种:基于运动区域检测的目标提取方法、基于纹理分割的提取方法合基于模板匹配的目标提取方法等。但是,这些方法都不适用于道路和周围场景不断变化的车载图像的目标跟踪。
3.1 前方车辆跟踪提取流程图
本系统将前方车辆图像提取出来,是通过综合运用分形和模板特征匹配等技术实现的。前方车辆跟踪提取流程图如图2所示。
3.2 初始目标模板的建立
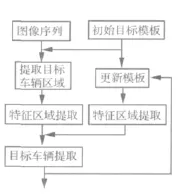
图2 前方车辆跟踪提取流程图
建立前方车辆的初始匹配模板,首先需要根据目标车辆上的某一点(x0,y0)的位置信息,以(x0,y0)为中心,在 δ邻域R0(x,y)内,确 定 目 标 图 像Tt0(x,y)存在的最大概率区域。以指定位置点(x0,y0)为中心,在区域R0(x,y)内提取目标轮廓,目标图像 Tt0(x,y)和区域R0(x,y)满足公式(4)。提取包含目标轮廓的最小矩形区域,就是初始目标模板[4]。

该初始目标车辆的模板将作为人造目标图像,用分形模型,对复杂的自然景物图像与人造目标进行分形检测,提取出可能的目标区域。
3.3 目标车辆区域提取
提取目标车辆区域就是从车载图像中找到目标车辆的可能区域,即与作为人造目标图像的车辆初始目标模板相匹配的区域。
由于在图像中自然景物的表面所映射出的灰度图像满足分形布朗随机场模型,一般的自然景物有粗糙的表面,因此映射出的图像纹理对应着较大的分形维数,而人造目标的平滑表面,映射出的图像纹理对应着较小的分形维数。因此分形维数可以作为一个常用的目标检测参数。分形检测算法就是从分形布朗模型出发直接提取分形特征的。
前方车辆的目标可能区域的检测,可以从复杂的自然背景图像和初始人造目标图像不同的灰度分形布朗模型出发,利用两者不同的分形特征分布关系,将自然景物图像和目标图形区分分开。
前方车辆的可能区域跟踪提取的具体方法是:首先用小波变换将实时图像变换为低频近似图像;其次将变换后的图像划分为大小超过背景纹理基元的互不重叠的小区域,对每个划分区域进行局部灰度计算,获得所选各区域的灰度分形维数;再提取出分形维数低于预定阈值的小区域,进行拟和误差运算,其中拟和误差超过一定阈值的所有小区域所在的位置,就确定为可能存在前方车辆的目标区域。
由于提取出来的可能目标区域有可能存在错检和漏检的失误情况,本系统采取形态学中腐蚀和膨胀的方法,得到最后的目标可能区域。如用腐蚀法将应该属于背景的区域错误的检测为目标可能区域的部分去掉;用膨胀法将没有被检测出来的属于目标的区域添加进来。
3.4 目标车辆提取
前方目标车辆的提取就是将目标车辆的最终模板从目标可能区域中提取出来。本系统采用模板匹配方法提取前方目标车辆。
在目标车辆模板中,以模板中心点为基准位置,在其邻域内搜索目标特征区域,采用各向同性Sobel算子做出判决。对目标车辆模板中心附近的点(i,j)进行 x,y方向的梯度检测[5],得到综合梯度值如公式(5)所示

其中A为检测点的3×3邻域。
统计特征区域内所有像素点的综合梯度值,并将其综合梯度值作为该区域的表征量,在目标车辆模板的区域内,将综合梯度值最大的区域作为目标模板的特征区域。
将上述提取出的目标模板的特征区域作为新的目标模板取代初始目标模板,并提取新模板的特征区域,与从下一帧图像中提取的模板特征区域进行相似性度量[6]。本系统采用最多邻近点距离(MCD)度量方法。
首先匹配提取出的目标模板的特征区域与下一帧图像中提取的模板特征区域对应点的灰度绝对差,如果这个灰度绝对差小于某个预设阈值,就可以认为这两点是近似的;再统计整幅图像区域中对应点像素灰度绝对差小于这个阈值的数目,就可以确定出这两幅图像的相似程度。门限值可经过实验方法得到,一般按照经验可取20~30。
统计前一目标模板图像特征区域与下一目标模板图像特征区域的最多邻近点距离,可以得到整幅图像的相关曲面,寻找这个相关曲面的谷点,就可确定为最佳匹配位置,从而提取出目标车辆。
本次提取的目标车辆模板,又将作为更新的模板,与下次提取的目标车辆模板进行模板匹配,提取出新的目标车辆,使模板的实时性好,保证了整个匹配和目标提取的精度。
4 车辆图像测距
图像是客观世界三维场景在二维像平面上的投影。距离远近的不同,前车在图中的成像大小也不一样,距离越远,成像越小;距离越近,成像越大[1]。任意两次测量的距离与成像大小成反比,距离与成像的宽度的关系[7]如式(6)所示

式中d1、d2分别为两次测量的距离,w1、w2分别为两次测量图像中的车宽。
车辆在图像中行驶到不同位置的距离与图像宽度的关系如图3所示。可以证明不同位置车辆的距离与图像宽度的关系满足:d1×w1=d2×w2=d3×w3=……=di×wi=C。
C为常数,为了减小测量误差,可以通过测量同一车道车辆多次记录的di和wi求算术平均值得到。
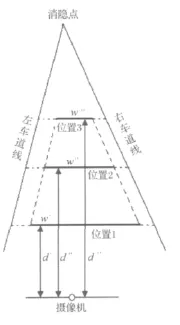
图3 车辆在图像中不同位置的距离与图像宽度关系示意图
若某位置图像中车辆宽度为w,则该位置距摄像头的距离d可按公式(7)计算得到。

式中d是车辆的距离,单位为m,w是图像中车辆宽度,单位为Pixel。
5 报警系统
理论上,高速公路上行车的安全距离大约是100 m。可设定车间距在50m~100 m之间时,系统发出预警信号,如预警灯闪亮,发出柔和提示音,提醒司机注意保持车距;车距在50m以内时,系统发出急促的声光危险报警信号,及时提醒司机采取制动措施,避免恶性追尾事件的发生。
6 结束语
本系统的关键技术是图像测距,即利用视觉图像方法实时获取车辆周围相关物体位置及与主车的相对距离。图像测距一般分为目标识别、目标跟踪和目标测距几个步骤。目标识别和目标跟踪是限制图像测距方法实时性的主要因素;而目标测距的算法对测量精度有直接影响。本文研究的目标为前方车辆,具体探讨了目标识别、目标跟踪和目标测距的实用算法及危险车距报警系统的模式。能达到有效避免汽车追尾恶性交替事故发生的目的。
[1]孙即祥.模式识别中的特征提取与计算机视觉不变量[M].北京:国防工业出版社,2001.
[2]刘波,钟幼强,等.基于红外图像处理的高速公路汽车追尾预警系统研究[J].中国仪器仪表,2008:195-198.
[3]刘志强,温华.基于单目视觉的车辆碰撞预警系统[J].计算机应用,2007,27(8):2056-2058.
[4]罗诗途,王艳玲.车载图像跟踪系统中复杂场景下目标提取算法的研究[J].应用光学,2008,29(6):837-843.
[5]PARRY H S,MARSHAI I A D,MARKHAM KC.Tracking targets in FLIR images by regiontemplate correlation[J].SPIE,1997(3086):221-232.
[6]任仙怡,廖云涛,张桂林.一种新的相关跟踪方法的研究[J].中国图像图形学报,2002,7(5):553-557.
[7]龙丹,许勇.基于数字图像处理的汽车测距算法研究[J].中国西部科技,2008(6):36-39.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
天津医科大学学报(2021年1期)2021-01-26
动漫星空(兴趣百科)(2020年11期)2020-11-09
科学(2020年3期)2020-01-06
趣味(数学)(2019年12期)2019-04-13
现代装饰(2018年11期)2018-11-22
电子制作(2017年7期)2017-06-05
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07