
光刻机主从滑模同步控制系统设计
2011-06-07 01:34:52武志鹏陈兴林王英红
电光与控制 2011年11期
武志鹏,陈兴林,王英红
(哈尔滨工业大学航天学院,哈尔滨 150001)
0 引言
步进扫描光刻机是当今世界主流的半导体芯片生产设备。在曝光扫描过程中,要求光刻机的掩模台和工件台在对应方向的运动保持同步。同步性能主要从两个方面考察,分别是同步偏差的移动平均差和移动标准差。当同步偏差增加时,焦深(DOF)和能量裕度(EL)会显著下降,将会严重影响硅片的曝光效果[1-2]。
同步控制在机械传动、机床加工和机器人等很多领域已经有了深入的研究,目前比较流行的同步控制方法是交叉耦合和主从控制方法。由于掩模台的扫描速度是工件台的4倍,而质量却是工件台的几分之一,故采用以掩模台为从动系统、工件台为主动系统的主从控制结构更为合理。目前ASML公司许多光刻机设备都采用这种控制结构[3]。其他控制方法和主从控制相结合也可以应用到光刻机同步控制的问题中,如迭代学习法[4]。
精动部分的执行机构为音圈电机,可以实现高速小行程的运动,精度为纳米级别,但音圈电机的行程非常小,不能独立完成一个曝光光场的扫描,所以需要直线电机配合来完成大行程运动。精动和粗动控制器的设计可以用传统频域校正法[5]和 PID 控制[6],优点是设计简单,工程中容易实现。
滑模变结构控制可以克服传统方法过于依赖被控对象精确数学模型的缺点,具有对参数摄动的自适应性[7-8]。精动部分的非线性和外界干扰往往不能忽略,采用滑模变结构控制方法可以有效地提高系统的鲁棒性并取得良好的控制效果[9-10]。本文将滑模变结构与主从同步控制方法相结合,根据硅片扫描特点设计了时变滑模面,使得掩模台和工件台的同步性能有了进一步的提高,保证了硅片的曝光效果。
1 问题的描述
同步偏差针对工件台和掩模台对应运动方向的位置输出定义,表达式为

其中:yw(t)和yr(t)为工件台和掩模台位置输出;es(t)为同步偏差。控制系统同步性主要从曝光扫描时间段内同步偏差的两个统计特性考虑,一个是移动平均差(MA),另一个是移动标准差(MSD),表达式如下:

其中:x为曝光点;tsc为扫描时间;tx为扫描至曝光光场中点的时刻。
同步偏差必须和跟踪精度在同一数量级,均为纳米级别,而粗动系统只能实现微米级精度,这样工件台和掩模台的两个粗动系统的同步性没有意义,实际中只要保证两个精动系统的同步性即可。同步控制系统结构图如图1所示。
图1中,Plw和Plr为工件台和掩模台的粗动被控对象,Pvw和 Pvr为精动被控对象,Clw,Clr,Cvw和 Cvr为对应控制器,ylw(t),ylr(t),yvw(t)和 yvr(t)为对应位置输出,es(t)为同步偏差。工件台和掩模台的粗动系统各自独立控制,只在两个精动系统之间考虑同步性,而且均采用粗动跟踪精动的控制策略。实际中粗动和精动之间存在耦合,但由于粗动台质量远大于精动台,故本文中将忽略它们之间的耦合关系。

图1 同步控制系统框图Fig.1 Block diagram of synchronization control system
对于掩模台精动音圈电机,其状态空间形式为

式中:xvr(t)=[xvr1(t)xvr2(t)]T为状态变量;uvr(t)为控制量;yvr(t)为相对位置输出。avr=/mvrRvr,bvr=Kvr/mvrRvr;Kvr为推力系数;mvr为运动部分质量;Rvr为线圈电阻。
2 滑模控制律设计
图1中的控制系统需要设计4个控制器,其中两个粗动控制器(Clw,Clr)和工件台精动控制器(Cvw)采用传统PID控制方法进行设计。粗动PID控制器的设计目标是实现微米级精度,带宽为150 Hz左右。精动PID控制器保证精度为纳米级别,带宽为300 Hz左右。由于PID控制器设计方法比较成熟,这里不作累述。
掩模台精动控制器一方面要实现掩模台的跟踪精度,另一方面需要保证系统的同步性能。同步性能只在扫描时间段内考虑,加速时间段和调整时间段内控制系统的主要任务是实现系统的动态性能,为减小非扫描时间段内工件台对掩模台的不利影响,采用时变滑模面,定义为

其中:λ1,λ2为正常数;ρ(t)为正的连续可微函数,并且ρ(t)和(t)有界。
滑模面中加入时变系数ρ(t)的意义是,在加减速和调整时间段内ρ(t)很小,式(5)中es作用不明显,掩模台精动控制器Cvr的作用主要是保证掩模台的动态性能。当进入扫描时间段内,ρ(t)会逐渐增加,es作用逐渐增强,Cvr可以兼顾掩模台和工件台之间的同步性。
式(1)为同步偏差的定义,同步偏差也可以由控制偏差求出,由于掩模台系统和工件台系统的参考位置输入相差4倍,则:

其中:evw和evr分别为工件台和掩模台的位置偏差。
式(5)对于时间求导数并将式(6)代入:

式(7)整理可得:

式(8)为一阶微分方程标准形式。由于工件台已经通过PID控制器保证了系统的稳定性,而且ρ(t)和(t)有界,故Q(t)可以近似为零。P(t)>0时,e(t)以指数形式收敛为零,收敛条件为

根据掩模台在整个曝光过程中的运行特点,选择时变系数ρ(t)为

其中:c1、c2和c3为正常数。
由式(7)可以计算出等效控制为

选择切换控制为

其中:rvr为参考输入量;kvr和εvr为正常数;sat(s)为饱和函数。
则掩模台精动滑模控制律为

3 仿真分析
步进扫描光刻机的一个完整的扫描过程主要包括加速过程、调整过程、曝光扫描过程和减速过程,是一个典型的S-曲线。仿真总扫描时间为300 ms,加减速时间为50 ms,调整时间为15 ms,扫描时间为150 ms。控制器参数为 λ1=186,λ2=5.2,kvr=300,εvr=0.00001,时变函数 ρ(t)系数选择为 c1=1.107,c2=0.15,c3=0.0971,此时≤δ=9.78。
图2、图3和图4分别为工件台和掩模台的y轴平移方向掩模台和工件台的位置曲线、速度曲线和位置偏差曲线。图3可以看出,调整时间小于15 ms,而且系统没有超调,在曝光扫描时间段内速度可以保证平稳。图4中,同步偏差和位置偏差保持在纳米级,移动平均差为1.8 nm,移动标准差为2.0 nm。

图2 掩模台和工件台位置跟踪曲线Fig.2 Position tracking curves of the reticle stage and the wafer stage
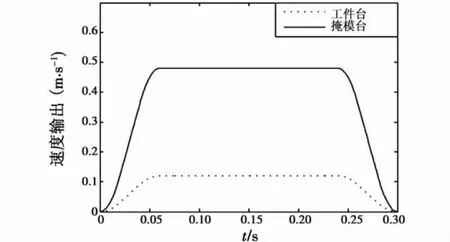
图3 掩模台和工件台速度跟踪曲线Fig.3 Speed tracking curves of the reticle stage and the wafer stage
为验证本文采用的滑模同步控制方法的有效性,分别和不采用同步策略的常规控制方法、PID主从控制方法做比较。3种控制方法的同步偏差对比如图5所示,同步偏差的移动平均差和移动标准差的对比见表1。

表1 同步偏差统计特性Table 1 Statistical property of synchronization deviation

图4 掩模台和工件台位置偏差曲线Fig.4 Position error curves of the reticle stage and the wafer stage

图5 同步偏差比较曲线Fig.5 Contrastive curves of synchronization deviation
从表1可以看出,滑模同步控制方法相对于常规控制方法,移动平均差减小30.8%,移动标准差减小66.7%;相对于PID主从控制方法,移动平均差减小18.2%,移动标准差减小61.5%。图5中,开始阶段滑模同步控制方法的同步偏差比较大,主要由于时变滑模面中的耦合项系数在此时间段内很小,但此时间段内的同步性没有实际意义;当快进入扫描时阶段内,耦合项系数会逐渐增加,使得扫描时间段内的同步性迅速提高。3种方法中,滑模同步控制系统的同步性能最好,完全可以保证光刻机设备的硅晶片的曝光效果,达到了控制系统的预期设计目的。
4 结论
为解决光刻机高精度位置跟踪以及掩模台和工件台的运动同步性问题,以主从同步控制结构为框架,根据掩模台和工件台在一个完整扫描周期内的运动特点设计了时变滑模面,同时利用控制偏差和同步偏差设计了同步滑模控制律,保证了掩模台和工件台的运动同步性。仿真结果表明,控制系统不但实现了高响应速度和高位置跟踪精度,而且在扫描曝光阶段内扫描速度平稳,同步偏差的移动平均差和移动标准差符合光刻机同步性的要求。
[1]CLAASSEN M,REUHMAN M,LOOCK A,et al.Dynamic performance of DUV step&scan systems and process latitude[C]//Proceedings of SPIE,2000,4000:776-784.
[2]LUCE E,MOUGEL S,GOIRAND P J,et al.Impact of synchronization errors on overlay and CD control[C]//Proceedings of SPIE,2002,4691:840-852.
[3]ASML.Lithographic apparatus having feedthrough control system:United States Patent,US2008/0239264A1[P].2008-10-02.
[4]MISHRA S,YEH W,TOMIZUKA M.Iterative learning control design for synchronization of wafer and reticle stages[C]//2008 American Control Conference,Washington,USA,2008:3908-3913.
[5]SCHROECK S J,MESSNER W C.On compensator design for linear time-invariant dual-input single-output system[J].IEEE/ASME Transactions on Mechatronics,2001,6(1):50-57.
[6]HEERTJES M F,SCHUURBLERS X G P,NIJMEIJER H.Performance-improved design of N-PID controlled motion systems with application to wafer stages[J].IEEE Transactions on Industrial Electronics,2009,56(5):1347-1355.
[7]姜静,伍清河.模糊滑模变结构控制技术的应用研究[J].电光与控制,2006,13(2):41-44.
[8]SHAHNAZI R,SHANECHI H M,PARIZ N.Position control of Induction and DC servomotors:A novel adaptive fuzzy PI sliding mode control[J].IEEE Transactions on Energy Conversion,2008,23(1):138-146.
[9]HUNG S K,HWU E T,CHEN M Y,et al.Dual-stage piezoelectric nano-positioner utilizing a range-extended optical fiber fabry-perot interferometer[J].IEEE/ASME Transactions on Mechatronics,2007,12(3):291-298.
[10]LEE S H,CHUNG C C.Optimal sliding mode dual-stage actuator control for magnetic disk driver[C]//43rd IEEE Conference on Decision and Control,Atlantis,Paradise Island,Bahamas,2004:4075-4080.
猜你喜欢
中国经济周刊(2023年23期)2024-01-08 05:43:43
中国经济周刊(2023年23期)2023-12-31 08:01:10
睿士(2023年10期)2023-11-06 07:05:44
健康体检与管理(2022年1期)2022-03-18 22:56:20
中国电子报(2020年56期)2020-09-13 22:47:25
微创医学(2019年2期)2019-12-22 13:31:16
传感器与微系统(2019年7期)2019-06-25 03:48:08
自然资源遥感(2017年2期)2017-04-27 09:32:01
光学精密工程(2016年3期)2016-11-07 09:04:21
电子工业专用设备(2015年4期)2015-05-26 09:10:35
