基于霍尔传感器反馈的AVR单片机直流电机伺服系统设计
2011-06-06 12:22杜秋来
时代农机 2011年9期
杜秋来
(江西渝州科技职业学院,江西 渝州 338029)
1 系统设计原理
本系统采用AVR ATmega8单片机,是基于AVR增强性能、RISC结构、低功耗、高速度、电源抗干扰能力强等的新一代微控制器,执行速度快,具有良好的性价比。ATmega8具有32个通用工作寄存器,带有硬件乘法器,三通道的PWM输出和8路10位ADC,还带有 8K的FLASH和1K的SRAM,数据吞吐率达1MIPS/MHz。
本控制系统采用L298作为电机驱动芯片,采用霍尔传感器作为转速测量。主要由AVR单片机ATmega8、L298驱动电路、直流电机、霍尔传感器、光耦器件、LED显示接口和通讯接口组成。
这是一个闭环控制系统,启动电机后,系统进入采样周期,电机转速改变,霍尔传感器产生一定量的脉冲个数,由霍尔传感器电路输出。经光耦器件进行隔离整形后,成为转速计数器的计数脉冲,反馈到ATmega8单片机。单片机系统通过通讯接口(例如IIC、并口通讯、串口通讯等)从控制端获得电机给定速度,或是单片机系统自行给定电机速度。单片机系统根据给定的转动速度与速度的反馈信号相减,得出偏差信号,通过各种控制算法得到控制量。单片机再把控制量通过PWM的形式输出,经过L298功率放大,驱动直流电机,然后进入下一个采样周期。LED显示主要用于软件调试和一些需要显示特定参数的场合。
2 霍尔传感器测速系统设计
(1)转速测量的基本原理。霍尔传感器是与电机同轴连接的,其输出脉冲频率与转速成正比。因此,根据脉冲发生器输出的脉冲序列,可以测量电机的转速和判别其转动方向。根据脉冲计数来实现转速测量的方法主要有M法 (测频法)、T法(测周期法)和MPT法(频率周期法),本系统采用了M法(测频法)。由于转速是以单位时间内转数来衡量,在变换过程中多数是有规律的重复运动。根据霍尔效应原理,将一块永久磁钢固定在电机转轴上的转盘边沿,转盘随测轴旋转,磁钢也将跟着同步旋转,在转盘下方安装一个霍尔器件,转盘随轴旋转时,受磁钢所产生的磁场的影响,霍尔器件输出脉冲信号,其频率和转速成正比。
(2)转速控制原理。直流电动机转速的控制方法可分为两类,即励磁控制法与电枢电压控制法。励磁控制,控制磁通,其控制功率虽然小,但低速时受到磁饱和的限制,高速时受到换向火花和换向器结构强度的限制;而且由于励磁线圈电感较大,动态响应较差。所以常用的控制方法是改变电端电压调速的电枢电压控制法。在电枢电压控制法中,PWM(脉宽调制)具有调速精度高、响应速度快、调速范围宽和损耗低等特点。在闭环控制系统中,按偏差的比例(P)、积分(I)、微分(D)进行控制的PID控制器获得了广泛的应用。它结构简单,参数易于调整,适应性广。
(3)L298驱动接口设计。ATmega8单片机输出的脉宽调制(PWM)信号才能不能直接驱动电机,需要经过功率放大,本调速系统采用L298专用电机驱动芯片,驱动接口电路如图1所示。集成电路L298是一种功率放大芯片,它有2路完全相同的电路。工作原理如下:在使能端6脚为高的情况下,当5脚为高,7脚为低时,电机向右转;当5脚为低,7脚为高时,电机向左转;当5脚和7脚的状态相同时,电机快速停止。在6脚为低的情况下,当5脚和7脚的状态相同时,电机自由停止。在连接时,单片机的PWM(10)输出引脚接L298的EnA(6)和 EnB(11)引脚,单片机的(13)经过逻辑电路接到L298的IN1~IN4输入引脚上。为了增强L298的驱动能力,本系统对L298的两路驱动进行了并联使用,最大驱动能力达到了3A。
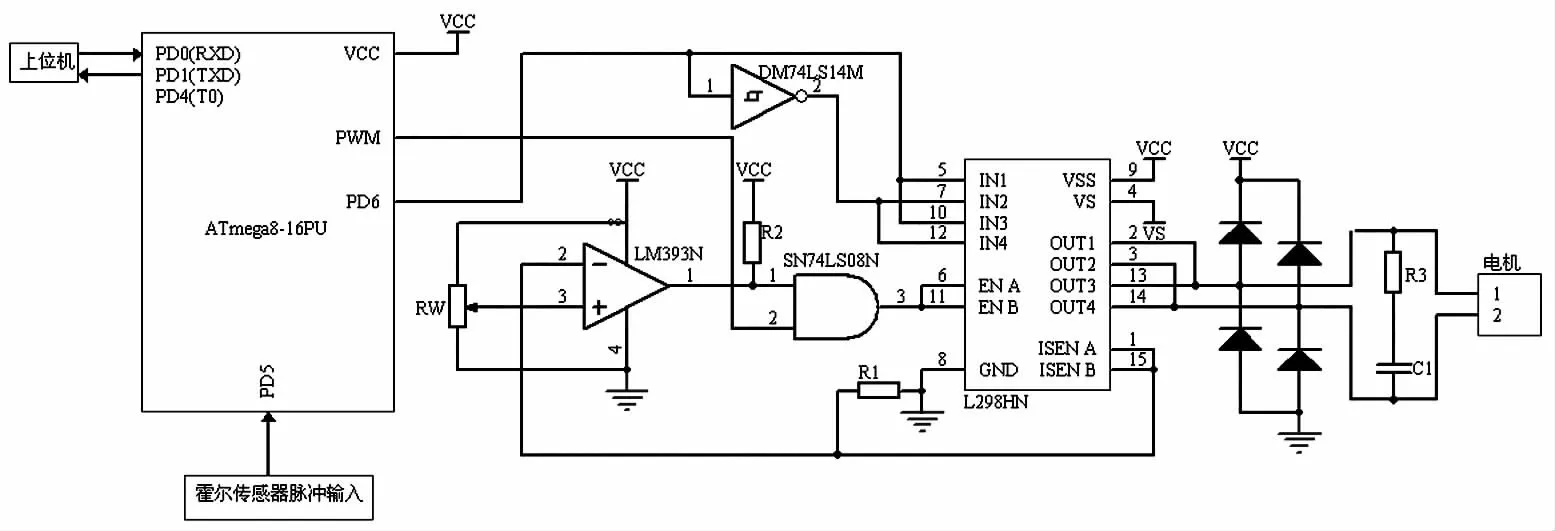
图1 系统接口电路
比较器LM393主要起到限制过流和保护L298的作用。LM393的同相端直接连到了一个可变点位计上,电位计的参考电压时可调的,调节电位计的参考电压能调节L298的限流电压。LM393的反相端接到L298的SENSEA和SENSEB两检测端。当检测电阻两端的电压大于限流电压时,比较器的反相端的电压大于同相端的电压,输出端输出低电平,从而把L298的EnA和EnB使能端拉低,L298停止工作。这就起到了限制过流和保护L298的作用。
3 软件设计
本系统采用外部晶振,系统时钟SYSCLK等于18432000,T0 定时 1 ms, 初始化时 TH0=(-SYSCLK/1 000)》8;TL0=-SYSCLK/1 000。等待1 s到,输出转速脉冲个数N,计算电机转速值。将1 s内的转速值换算成1 min内的电机转速值,并在LED上输出测量结果。
这里采用ATmega8中的INT0中断对转速脉冲计数。定时器T1工作于外部事件计数方式对转速脉冲计数;定时器方式均工作于方式1。主程序首先从上位机(或是单片机系统自行给定)获得控制电机转速的命令字,命令字包括控制电机的速度、转向等信息,然后检查收到的数据是否有效,如果无效,则向上位机发出“命令错”信息,继续等待上位机发出命令字;否则,调用速度控制子程序,然后等待外部中断0的产生。在速度控制子程序中,只要定时中断有效,就调用PID算法程序,系统根据预设值与当前电机的转速等参数,改变输出PWM波形的占空比,使电机达到预定的转速值,这就是本系统的控制过程。
4 实验测试
在这里选用欧鹏公司的教学机器人其中的关节控制电机作为实验对象。电机为DunkungMotor14W直流伺服电机,额定电枢电压12V,额定电流2.8A;选用美国史普拉格公司(SPRAGUE)生产的3000系列霍尔开关传感器3144。实验结果表明,速度控制平稳,电机正常工作。
5 结论
本测速系统采用集成霍尔传感器检测速率信号,具有频率响应快、抗干扰能力强等特点。霍尔传感器的输出信号经信号调理后,通过单片机对连续脉冲记数来实现转速测控,并且充分利用了单片机的内部资源。ATmega8 AVR单片机是一种高性价比的单片机,结合电机驱动芯片L298,保证了该系统非常高的经济性与可靠性。经过测试并对误差进行分析发现,该系统的测量误差在3%以内,并且在测量范围内转速越高测量精度越高。所以该系统具有很大的实用价值。
猜你喜欢
基层中医药(2022年5期)2022-10-24
数学物理学报(2022年3期)2022-05-25
数学物理学报(2019年5期)2019-11-29
电子制作(2018年2期)2018-04-18
中成药(2017年12期)2018-01-19
上海公路(2017年1期)2017-07-21
童话王国·文学大师班(2017年6期)2017-07-10
现代工业经济和信息化(2016年12期)2016-05-17
太空探索(2015年6期)2015-07-12
世界科学(2013年6期)2013-03-11