船舶电力推进SSP电机应用IGA-ANFIS优化控制
2011-06-06 10:02张桂臣马捷
电机与控制学报 2011年11期
张桂臣, 马捷
(上海交通大学海洋工程国家实验室,上海 200240)
0 引言
船舶电力推进系统(marine electric propulsion system,MEPS)能充分利用柴-电发电、风能、太阳能及蓄电池的储能,可节约燃油、降低营运成本[1],是很有发展前景的船舶能源综合优化利用系统[2-3],也是船舶节能减排领域的研究热点。ABB、SIEMENS等各推出了MEPS及其控制系统,先进的MEPS采用吊舱推进型式[4]。其中,西门子-肖特尔-推进器(Siemens-Schottel-propulsor,SSP)型吊舱推进的电机两端直接驱动螺旋桨,其转子为螺旋桨的共同轴,故SSP推进电机是MEPS管理和优化控制的核心。
目前,SSP电机控制主要有SIEMENS矢量控制(vector control,VC)[5]、ABB 直接转矩控制(direct torque control,DTC)[6]及 PI算法。由于 SSP 几何形状和运动复杂,其工作环境恶劣、工况变动频繁、参数摄动和随机扰动严重[4],提高SSP的鲁棒性需要自适应控制。模型参考、滑模、变结构、自适应PID等控制算法,需要精确的系统数学模型[7]。SSP为非线性复杂系统,其某些参数未知、负荷及工况变动不确定,难以建立精确的SSP模型。
鲁棒控制、自适应控制、智能控制等应用于感应电机的VC和DTC系统,以提高电机控制的鲁棒性和抗干扰能力[8-10]。自适应神经模糊推理系统(adaptive neuro-fuzzy inference system,ANFIS)在多输入多输出 (multi-input and multi-output,MIMO)、非线性控制系统中应用广泛,ANFIS通过混合算法可逼近系统模型[11-15]。免疫遗传算法(immune genetic algorithm,IGA)是一种模拟自然选择和进化过程的寻优算法,能随对象的变化而发生变化,具有组合优化、自学习和多适应性[16-17],适宜于SSP电机控制性能优化。
SSP电机的转子轴与螺旋桨同轴且直接驱动,由于螺旋桨的水动力特性复杂,船-机-桨相互影响,SSP电机比普通电机的工作条件恶劣[4]。设计IGA-ANFIS复合控制策略进行SSP电机的优化控制,应用ANFIS跟踪SSP系统的输出,IGA优化SSP的控制参数。将SSP系统的性能指标(如超调量、稳定时间)作为IGA-ANFIS的适应度函数,忽略无法准确表达SSP系统物理含义的某些参数、数学模型[7],实现所需参数少、鲁棒性好的优点。
1 SSP电力推进实验系统设计
按照性能相似、几何相似和虚船实电的思想,以中远集团半潜船“泰安口”SSP吊舱推进系统为研究对象,选用了符合实船使用标准的驱动系统Siemens Sinamics S120,构建SSP推进半实物模拟系统,用于SSP推进电机的特性试验和控制算法的优化研究,方法简单可靠[5],系统设计如图1所示。
图1中,M1为模拟推进电机,拖动M2和两个螺旋桨;M2为负载电机,模拟实船不同工况下的螺旋桨转矩特性。M1和M2为直接对拖工作方式,通过控制电机处于不同的运行状态[18],实现对SSP吊舱推进的工况模拟。CU320为系统的控制核心,与上位机以太网通信;整流模块Active Line Supply具有能量回馈功能;逆变模块Power Unit驱动M2,带适配器的逆变模块Power Module&CUA310驱动M1;各模块经Drive-CLiQ通信互联。上位机运行船舶近似模型,实现整个系统的监控与操作。
SSP电机的主要参数为:额定电压400 V;额定电流6.8 A;额定功率3 kW;额定频率50 Hz;额定转速1420 r/min;额定转矩20 N·m;功率因数0.82;定子电阻1.4 Ω,定子漏感9.2 mH;转子电阻1.7 Ω;转子漏感9.7 mH;系统转动惯量0.0285 kg·m2。

图1 西门子-肖特尔-推进器(SSP)半实物模拟系统Fig.1 Hardware-in-the-loop simulation system of SSP
2 SSP电力推进系统的控制模型
图1上位机运行的船桨数学模型根据M1转速和船速推算出螺旋桨转矩,再经Power Unit模块改变M2的同步转速,选择M2合适的机械特性曲线,实现对M2的转矩控制,达到实船模拟的效果。SSP的动力模型为

式中:Tp为螺旋桨转矩;Fe为螺旋桨有效推力;Pp为螺旋桨功率;ρ为海水密度;ζ为反映桨对船影响的推力减额系数;J为螺旋桨进速比;KT(J)为无因次的转矩系数;KF(J)为无因次的推力系数。KT(J)和KF(J)均是J的函数,可由螺旋桨工作特性曲线获得[4]。
船舶稳定航行时,J为常数,螺旋桨必工作在某一 J 的特性曲线上[4]。
M1、M2 的电磁转矩[19]为

式中:Te为电磁转矩;p为磁极对数;Rr为转子电阻;ψr为转子磁通有效值;为给定转差角频率。实际控制中转子磁通基本为定值[19],Te与 ω*s成正比。
SSP系统的摩擦转矩Tf为

式中:Ω=2πn/60;Ts为静摩擦矩;kΩ为线性摩擦系数。
SSP系统的运动方程为

式中:Is为SSP转动惯量;Tm1为SSP系统的驱动转矩;Tm2为SSP系统的负载转矩;Tsp为转矩指令;Tm为电机转矩;τm为电机转子时间常数。
由式(5)~式(7)得M1的复合控制[20]为
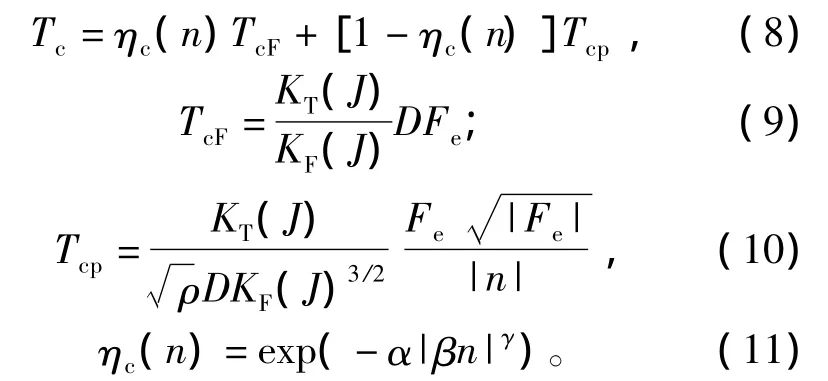
式中:Tc为M1复合控制指令;TcF由式(1)和式(2)得出;Tcp由式(1)~式(3)得出;Tc综合了转矩和功率控制模式。
3 基于IGA-ANFIS的SSP控制系统设计
基于IGA-ANFIS的SSP控制器由指令发生器、复合控制器、惯性补偿、摩擦补偿、限制环节、ANFIS和IGA组成,控制系统设计如图2所示。
由式(6)得SSP电机的参考转速为
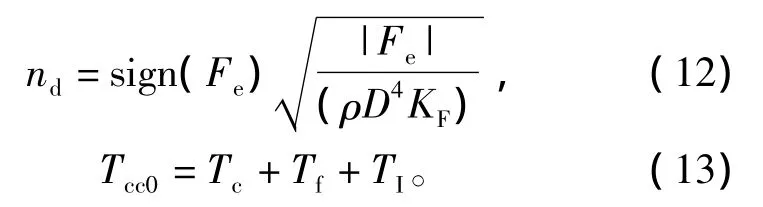
式中:Tc由式(8)得出复合控制部分;Tf由式(5)得出的摩擦补偿;惯性补偿TI=J2π˙nd;Tcc0为带补偿的复合控制指令。

式中:最大转矩Tmax=kTN;最大功率Pmax=kPN;过载系数k=1.1~1.2;TN、PN均为额定值。
ANFIS由自适应神经网络和模糊if-then规则构成,既有自学习功能,又可表达模糊变量,文献[3,7-11]已给出了ANFIS的层次结构和算法。图2中,Ⅰ层的模糊集A,B,C隶属函数为钟形,即

式中{φij,θij,ρij}为前提参数,影响隶属函数形状。
wj为Ⅱ层的每条规则激励强度为Ⅲ层的归一化激励强度,Ⅳ层为自适应函数节点,Ⅴ层为固定单结点,计算总的输出。ANFIS模糊推理规则为

式中{pl,gl,ql,λl}为结论参数。
运用递归最小二乘法、BP和最陡下降法组成的混合算法通过前向和后向通道分别进行ANFIS模型的前提参数和结论参数的辨识,调整隶属函数形状[7,11-15]。确定了前提参数,ANFIS 的输出为结论参数的线性组合,即

α-β-γ输入ANFIS,ANFIS输出为IGA的适应度值。利用Matlab的ANFIS编辑器,装载M文件中的训练样本(36个数据)作为ANFIS的训练数据源,初始化ANFIS的参数和结构(49规则)进行训练,采用混合算法,误差极限取为0.0453,训练步数为1000,训练结果保存在名为“*.fis”文件中。
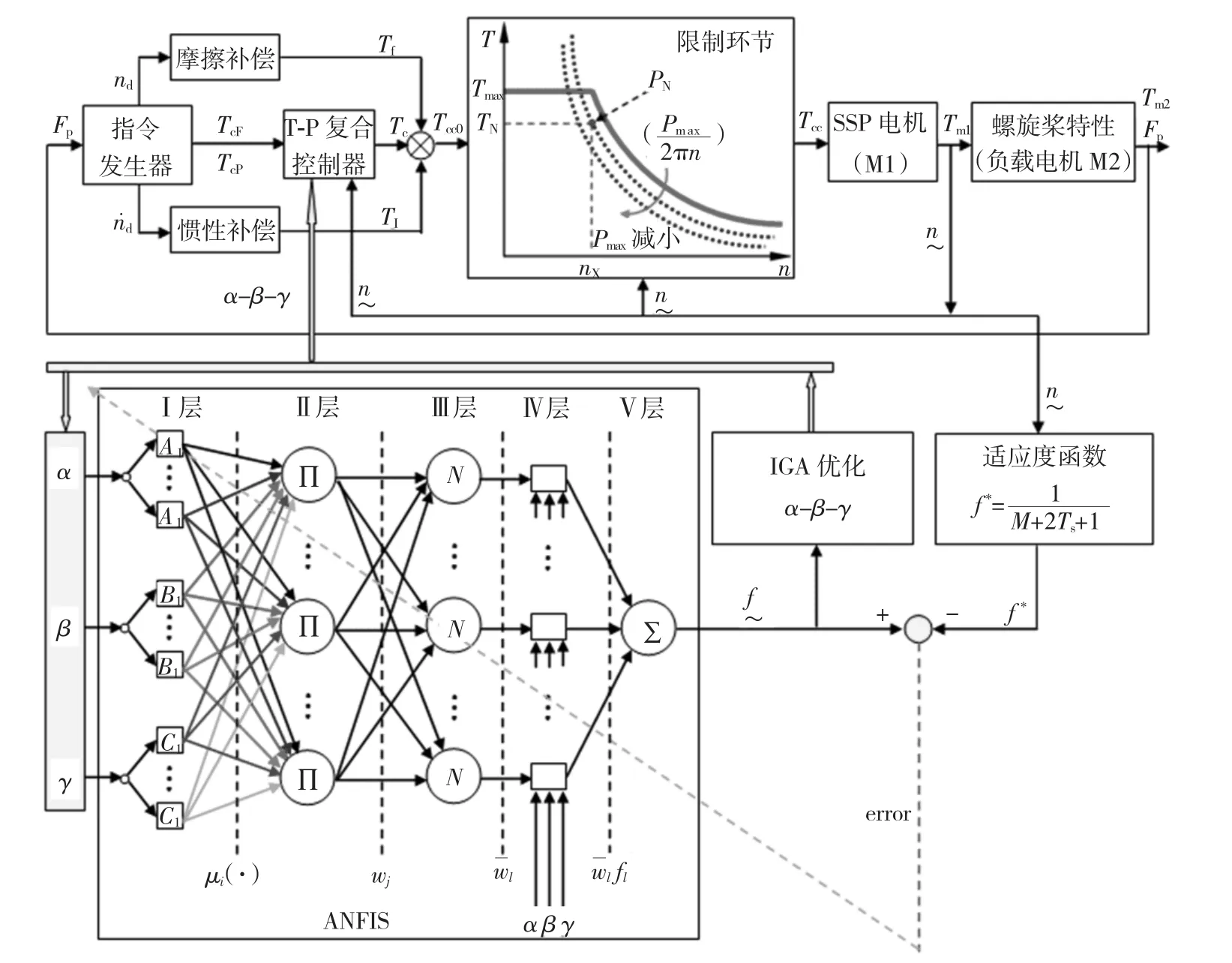
图2 基于IGA-ANFIS的SSP控制系统Fig.2 The SSP control system based on IGA-ANFIS
上位计算机应用Matlab语言编写IGA程序优化α-β-γ。首先将α-β-γ编码表示成个体,并由若干随机个体组成初始群体;然后模拟生物进化过程,通过扩展操作在群体中较优秀个体的小邻域内进行局部搜索,同时利用突变操作在较差个体的大邻域内搜索[16-17]。利用生物免疫系统的抗体多样性提高IGA全局搜索能力,细胞自我调节机理提高IGA的局部搜索能力,免疫记忆功能加快搜索速度,提高IGA的总体搜索能力[16]。综合生物免疫机制和生物进化的IGA算法,其流程如图3所示。
抗体浓度函数以某抗体的数目在全部抗体数目中所占的比例,控制特种抗体数目。为了防止基因缺失,抗体浓度一定的前提下,抗体选择函数以较大概率选择适应度大的抗体,或以较小概率选择浓度大的函数,使抗体种类呈现多样性[16]。
由SSP电机转速最大超调量M(r/min)和稳定时间Ts(ms)确定的适应度函数评价ANFIS输出的适度值[7],适应度函数为

α-β-γ输入ANFIS训练和由M-Ts得出的适应度函数调整后,ANFIS能学习SSP系统特性,IGA优化α-β-γ,ηc(n)具有自适应性。IGA参数选择:初始化种群规模为20,进化代数为60代,每代抗体数为50,交叉率为0.80,变异率为0.20,染色体长度为36(α、β、γ分别为12bit)。α-β-γ取值范围分别在3~6.5,0.3~2和0.1~1之间。
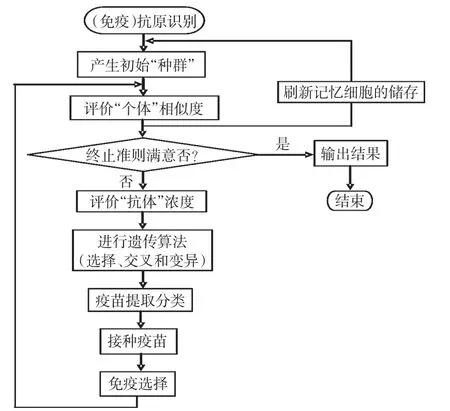
图3 IGA算法流程图Fig.3 The flow chart of the IGA
4 结果分析
船舶运动近似模型由线性环节、积分环节与带延迟的二阶惯性环节的卷积组成。船长L=187.0 m;型宽B=31.0 m;型深h=16.75 m;船舶常数R=230;营运航速v=14.5 km;直径D=6 m;总平均螺距P=4.731 m;推力系数 KF=[0.1,0.57];转矩系数 KT=[0.065,0.25];摩擦系数 kΩ=[0.8,1]。IGA-ANFIS基于Matlab方法实现,建立Matlab与Excel的读写通道,应用Siemens Scout软件ST语言编程直接读写Excel中的数据,然后经Sinamics系统驱动M1和M2电机。
Siemens Scout本身具备的自整定PI控制SSP运行结果如图4所示;基于IGA-ANFIS的SSP运行结果如图5所示。M1转速变化范围为0~1510 r/min,M2转矩变动范围为0~22 N·m。

图4 基于自整定PI的SSP电机转速控制Fig.4 Speed control of SSP motor based on self-tuning PI

图5 基于IGA-ANFIS的SSP电机控制结果Fig.5 The control results of SSP motor based on IGA-ANFIS
图4为基于SIEMENS自整定PI的SSP转速控制结果,4.2~20.3 s加载过程,M2转矩由0→16 N·m,M1转速超调-14.17 r/min,过渡过程时间为16.1 s;M1被控制在1500 r/min时,恒负载情况下转速波动-2.52~1.86 r/min;减载过程中,转速波动约 ±1.76 r/min。
图5(a)为基于IGA-ANFIS的SSP转速控制结果,Ⅰ和Ⅴ:负载转矩为22 N·m,恒负载情况下转速波动约±1 r/min;Ⅱ:负载转矩由22 N·m→0时,M1转速超调约7.85 r/min,过渡过程时间约15 s;Ⅲ:负载转矩为0,空载情况下转速波动约±0.49 r/min;Ⅳ:负载转矩由0→22 N·m加载过程中,转速超调约-12.28 r/min,过渡过程时间约16.7 s。
图4和图5(a)结果比较表明:自整定 PI和IGA-ANFIS用于SSP电机的转速控制,都能满足SSP电机的控制要求。IGA-ANFIS控制的电机转速波动小、超调量小和过渡过程时间短,负荷越小稳定性越好。自整定PI对SSP电机的整个控制过程转速波动较严重。
图5(b)为SSP电机优化控制的自适应系数变化曲线,稳定工况,满负荷时(Ⅰ和Ⅴ),ηc(n)变化范围为0.204~0.209;空载时(Ⅲ),ηc(n)≈0.151。减载过程(Ⅱ),ηc(n)也减小;加载过程(Ⅳ),ηc(n)随之增大。图5(b)表明,优化控制策略中的功率控制占主导地位,负荷越大,功率控制作用变弱;ηc(n)随转速变化方向相反,随负载变动方向一致,稳定状态下,转速波动对ηc(n)影响很小。
5 结论
基于Siemens Sinamics的SSP吊舱推进半实物模拟系统,将IGA-ANFIS复合控制算法应用于SSP电机的优化控制。
1)SSP电机比普通电机复杂,其控制策略中增加了螺旋桨与推进电机的特性、摩擦及惯性,具有系统特性补偿及扰动前馈的控制功能。
2)IGA-ANFIS不需SSP系统复杂的数学模型,ANFIS直接从输入(α-β-γ)-输出(f(M,Ts))数据模拟SSP系统过程响应的动态模型,IGA由SSP系统性能指标(f(M,Ts))优化控制参数。
3)IGA-ANFIS与SIEMENS自整定PI进行比较的实验结果表明:两者都满足控制要求,IGA-ANFIS比自整定PI所需参数少、稳定性好。
[1]DIMOPOULOS G G,KOUGIOUFAS A V,FRANGOPOULOS C A.Synthesis,design and operation optimization of a marine energy system[J].Energy,2008,33(2):180-188.
[2]ERICSEN T,HINGORANI N,KHERSONSKY Y.Power electronics and future marine electrical system[J].IEEE Transactions on Industry Applications,2006,42(1):155-163.
[3]APSLEY J M,GONZALEZ-VILLASENOR A,BARNES M,et al.Propulsion drive models for full electric marine propulsion systems[J].IEEE Transactions on Industry Applications,2009,45(2):676-684.
[4]李巍,汪蕾,杨晨俊,等.吊舱推进器定常水动力性能[J].上海交通大学学报,2009,43(2):204-207.LI Wei,WANG Lei,YANG Chenjun,et al.The steady hydrodynamics performance of pod-propeller[J].Journal of Shanghai Jiao Tong University,2009,43(2):204-207.
[5]高海波.船舶电力推进系统的建模与仿真[D].武汉:武汉理工大学能源与动力工程学院,2008:13-73.
[6]刘述喜.三电平逆变器供电的感应电机直接转矩控制系统的研究[D].重庆:重庆大学电气工程学院,2010:67-117.
[7]USTUN S V,DEMIRTAS M.Modeling and control V/f controlled induction motor using genetic-ANFIS algorithm[J].Energy Conversion and Management,2009,50(3):786-791.
[8]GADOUE S M,GIAOURIS D,FINCH J W.Artificial intelligence-based speed control of DTC induction motor drives-a comparative study[J].Electric Power Systems Research,2009,79(1):210-219.
[9]朱晓琳.基于神经网络的感应电机矢量控制系统研究[D].武汉:华中科技大学控制科学与工程系,2007:21-34.
[10]张志锋,唐任远,朱建光,等.感应电机磁链和转矩的非奇异终端滑模控制[J].电机与控制学报,2010,14(12):47-51.ZHANG Zhifeng,TANG Renyuan,ZHU Jianguang,et al.Nonsingular terminal sliding mode control of flux and torque for induction motor[J].Electric Machines and Control,2010,14(12):47-51.
[11]HSU C F,LIN P Z,LEE T T,et al.Adaptive asymmetric fuzzy neural network controller design via network structuring adaptation[J].Fuzzy Sets and Systems,2008,159(20):2627-2649.
[12]武星星.模糊系统和ANFIS的改进及其在加工参数智能选择中的应用研究[D].长春:吉林大学机械科学与工程学院,2007:97-115.
[13]张志军.PSA-ANFIS方法及其在矿山岩土工程灾害预测中的应用[D].长沙:中南大学资源与安全工程学院,2008:17-42.
[14]GEETHANJALI M,SLOCHANAL R M S.A combined adaptive network and fuzzy inference system(ANFIS)approach for overcurrent relay system[J].Neurocomputing,2008,71(4):895-903.
[15]SOYGUDER S,ALLI H.An expert system for the humidity and temperature control in HVAC systems using ANFIS and optimization with fuzzy modeling approach [J].Energy and Buildings,2009,41(8):814-822.
[16]冯利军.基于免疫遗传算法的土坡稳定可靠性分析研究[D].西安:煤炭科学研究总院西安分院,2007:34-63.
[17]沈煜,陈柏超,袁佳歆,等.基于免疫遗传算法的逆变器控制策略及其 DSP实现[J].电力自动化设备,2006,26(6):40-43.SHEN Yu,CHEN Baichao,YUAN Jiaxin,et al.IGA-based control strategy for inverter and its realization on DSP platform[J].Electric Power Automation Equipment,2006,26(6):40-43.
[18]胡文斌,刘少培,张胜洲,等.电压解耦矢量控制型交流牵引平台[J].电机与控制学报,2009,13(6):903-907.HU Wenbin,LIU Shaopei,ZHANG Shengzhou,et al.AC traction test platform controlled by voltage-decoupled vector control[J].Electric Machines and Control,2009,13(6):903-907.
[19]刁利军,沈茂盛,林文立,等.电力推进负载模拟系统原理分析和实现[J].电工技术学报,2009,24(7):70-75.DIAO Lijun,SHEN Maosheng,LIN Wenli,et al.Principle analysis and realization of electric propulsion load simulation system[J].Transactions of China Electrotechnical Society,2009,24(7):70-75.
[20]SØRENSEN Asgeir J,SMOGELI Øyvind N.Torque and power control of electrically driven marine propellers[J].Control Engineering Practice,2009,17(9):1053-1064.
猜你喜欢
航空发动机(2020年3期)2020-07-24
四川冶金(2018年1期)2018-09-25
兰台世界(2017年10期)2017-06-01
现代检验医学杂志(2016年3期)2016-11-15
通信电源技术(2016年1期)2016-04-16
电机与控制应用(2015年3期)2015-03-01
肝博士(2015年2期)2015-02-27
现代检验医学杂志(2015年4期)2015-02-06
中国舰船研究(2014年1期)2014-05-14
现代检验医学杂志(2014年1期)2014-02-06