GPS在码头水平位移监测中的应用研究
2011-06-05 04:39:22杨富春黄张裕郭腾龙
水利与建筑工程学报 2011年6期
杨富春,黄张裕,洪 毅,郭腾龙
(河海大学 地球科学与工程学院,江苏 南京 210098)
传统的码头水平位移监测方法有很多,主要有视准线法、支距法、引张线法、前方交会法、极坐标法以及小角法等[1],这些方法有其各自的优点,如投资小,作业方便灵活等,但也会受场地通视条件、大气折光及码头附近地形条件的限制,实际施测不是很方便。而GPS具有观测精度高、不受通视条件限制及全天候作业等优点[2],可以很好的应用于码头的位移监测中。随着GPS系统的不断完善,数据处理软件性能不断得到改进,测量的精度得到了很大的提高,平面精度可以达到毫米级甚至亚毫米级,高程精度也可以达到厘米级甚至毫米级,完全可以满足常规监测要求,高精度的GPS正越来越多的被应用到精密工程测量中[3-5]。依据《水运工程测量规范》(JTJ203-2001),码头属于对变形比较敏感的水工建筑物,变形监测点应满足二等精度要求,即平面点位误差不大于±3mm,高程中误差不大于±1mm[6]。采用GPS进行平面位移监测,施测方便,测验精度完全可以满足实际监测要求。本文针对某一码头的监测实例,分析了GPS用于码头水平位移监测的方法和施测流程,并进行精度分析和监测资料分析,表明GPS完全可以满足码头水平位移监测的要求。
1 码头监测网布设
1.1 监测概况
长江沿岸某码头为高桩梁板结构,码头长745 m,宽 35 m,建设 2个50000 t级杂货泊位,1个40000 t级多用途泊位,引桥4座。码头上部为现浇下横梁、上横梁,预制安装纵梁和码头面板,现浇码头面层,施工已经完成。该码头大部分建筑物位于水中,按照设计监测要求,整个监测网共布设34个点,其中远离码头变形区域外布设2个基准点,码头4个引桥上各布设2个监测点,整个码头上布设24个监测点,如图1所示。

图1 码头基准点及监测点布置图
1.2 基准点布设
基准点是整个码头监测系统起算的基准,其精度直接决定后续每期解算的成果精度,所以基准点布设应满足稳定可靠、方便作业及观测条件好等基本条件[7]。基准点布设个数至少2个,最好是3个,以防止在其中一个基准点遭到破坏后可以用第三个点代替,保证基准的稳定性分析。基准点建造观测墩,并安装强制对中装置,且基准点布设应尽量与码头平行,如图1所示。
1.3 监测点布设
码头监测点的布设位置选择在能反映变形体形变特征又便于监测的位置。GPS测量虽然对通视条件没有要求,但对周围环境还是有要求的。由于码头上情况复杂,通常都有大型的机器作业,在码头两侧一般堆放有很多物品。所以在监测点布设时尽量避开这些大型机器,减少多路径效应的影响,有良好的天空视角,保证GPS接收机能跟踪到更多的卫星。对于该码头监测点布设在每一块伸缩缝附近,且码头两侧各布设一个,监测点大致在一条直线上,如图1所示。
2 GPS观测方法
水平位移外业观测采用4台Topcon HiperⅡG型双频GPS接收机,仪器标称精度为3mm+0.5 ppm,以静态模式进行同步观测。作业方式严格按照表1所示的GPS测量作业技术指标进行,作业前进行测区卫星预报,确保卫星状态满足测量要求。

表1 GPS测量作业规范要求
外业观测作业严格按照GPS操作规程进行操作,在每点设站精确对中整平,对中误差小于1mm,在间隔120°三个方向处各量取一次天线高,三个方向量取值之差不得超过2mm,取平均值作为天线高;若三个方向量取的天线高之差超过2mm,则需重新整平仪器。观测时A、B两台接收机分别架设在两个基准点上,C、D两台接收机分别架设在两个监测点上;一个观测时段结束后,A、B两台接收机不动,保持基准的一致性,C、D两台接收机移到另外两个监测点上,直至整个监测网所有监测点观测完毕。首期观测由于3号引桥上临时停放很多机器设备,两个监测点无法观测,所以第一期数据中缺失YQ3-1和YQ3-2这两个点的数据,这两个点将会在后续的各期观测中添加进来。
3 数据处理和精度分析
3.1 基线解算及外业数据检核
GPS观测数据处理采用拓普康公司的随机软件Topcon Tools进行基线解算和平差处理。基线解算采用双差固定解,进行单基线解算,对解算后基线向量进行残差分析,对残差较大的基线进行相应解算处理,剔除不合格基线向量,保证基线向量观测值偶然中误差不大于±1cm。
GPS观测解算总共得到79条基线,基线解算精度都达到毫米级,最大基线边长中误差为4.2mm,最小基线边长中误差为1.4mm。受篇幅限制,本文只给出典型的20条基线的解算精度进行统计。
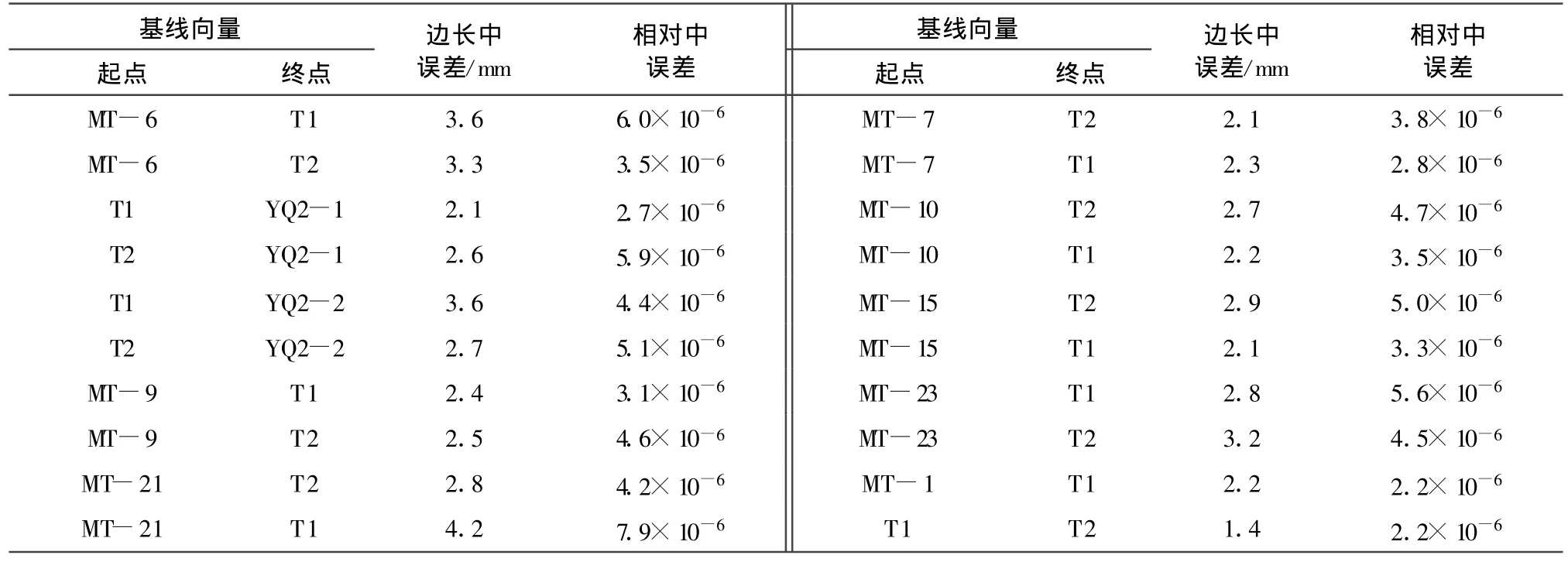
表2 GPS监测网基线边长中误差和相对中误差
3.2 GPS网平差处理
首先在WGS-84坐标系下,对GPS网进行整体无约束平差,此时所有观测基线向量都参与平差,以此来检测外业观测成果内符合精度。经检验,基线向量改正数 VΔ x、VΔ y、VΔ z均小于等于 3σ(对应等级的单位权中误差),未出现异常,因此观测成果具有较高的内符合精度,不存在明显粗差。
然后再选取独立基线的最优解进行构网约束平差,仅固定T1点(T1点为业主提供的已知坐标点),将WGS-84基线向量归化到北京54坐标系椭球面上,通过高斯正形投影,经平移旋转变换,得到中央子午线经度为120°的平面直角坐标成果。经过整体平差,得到各监测点和基准点坐标值。表3给出了两个基准点、所有监测点的精度统计。
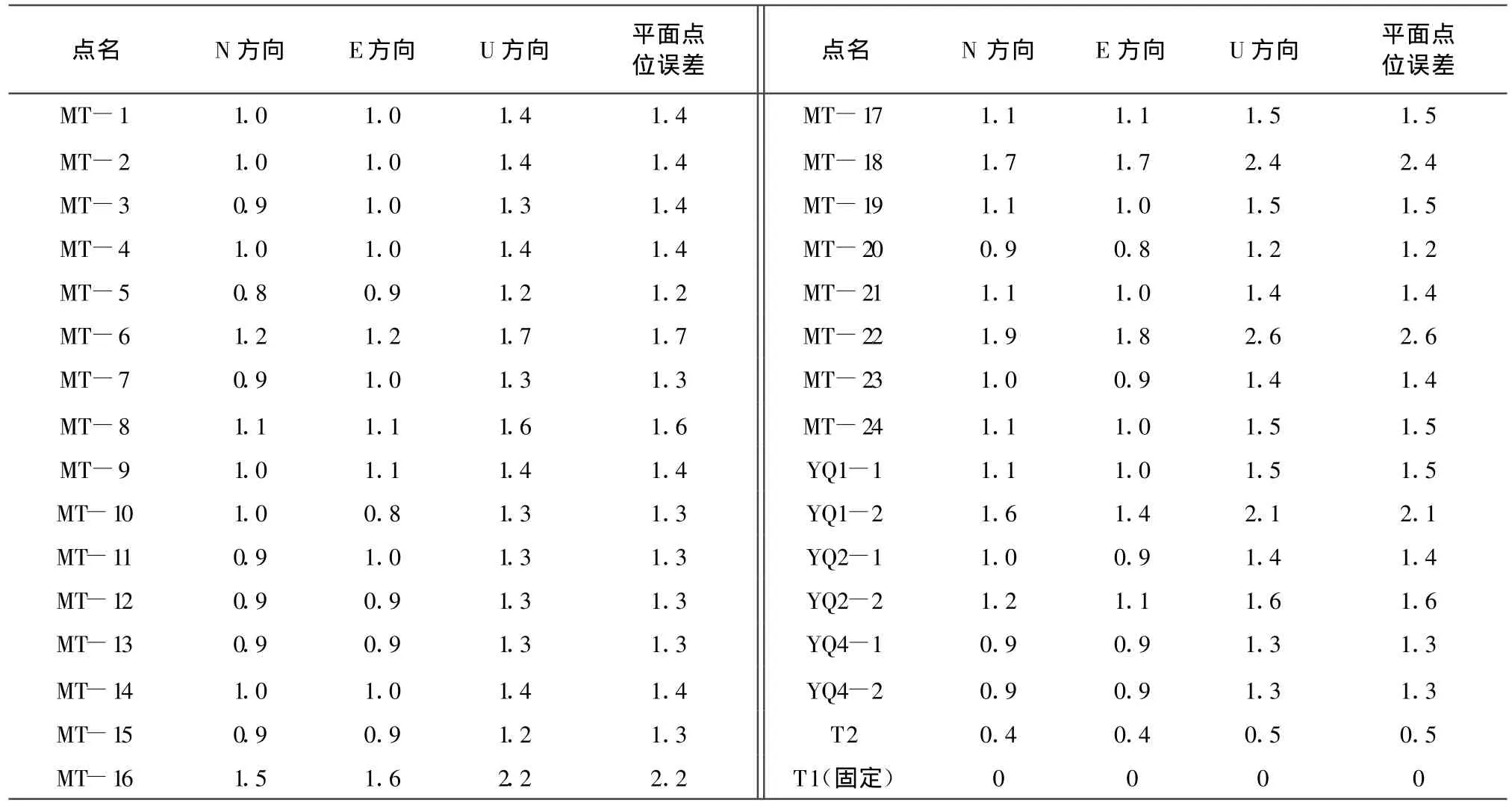
表3 基准点及监测点的精度统计 单位:mm
从表3基准点和监测点的中误差可以看出, GPS在高程(U)方向的精度要比南北(N)和东西(E)方向的低一些,但都没有超过3mm,水平位移监测满足码头监测精度要求,高程位移不能满足码头监测高程的精度要求,所以GPS测得的高程数据只能作为一种参考数据,监测点的高程测量还是要用传统的二等几何水准测量来完成。从表3中也可以看出监测点的平面点位中误差都在3mm以内,满足码头监测的精度要求,监测成果合格,数据有效。
本次GPS网平差得到的数据作为第一期监测数据,其中基准点T1、T2点坐标将作为后面各期观测数据平差时的约束点,后面各期观测都进约束平差,测得的数据分别与第一期数据求差,得到各监测点的水平位移值,从而分析码头的平面变形情况。
4 监测数据分析
该码头的监测工作从2011年1月15日开始,至2011年10月底已进行了10期变形观测。由于码头监测点比较多,现只选取典型的6个点为例进行形变分析。图2、图3分别给出了码头上这6个监测点在南北向(N)、东西向(E)的点位水平位移变化。表4为6个监测点的累计变化量。
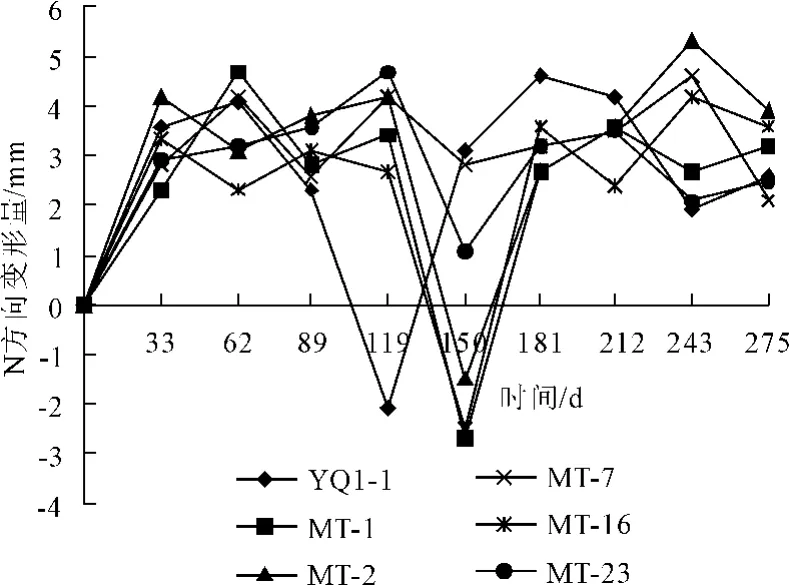
图2 6个监测点在南北向(N)的位移值
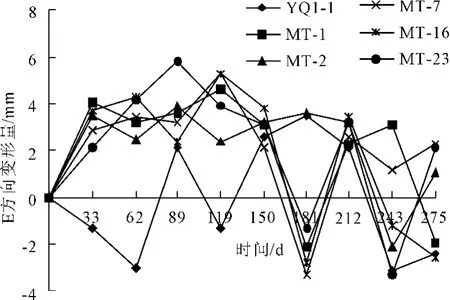
图3 6个监测点在东西向(E)的位移值
从图2、图3、表4可以看出6个监测点在南北向(N)和东西向(E)有小范围的位移变化,到2011年10月底(施工完成近1年)为止,累计的位移量也只在4mm以内,平面位移累计不超过5mm。考虑到码头受到荷载、风力、江水涨潮落潮的影响,可以认为整个码头没有发生整体大趋势性偏移,码头的稳定性良好,结构安全。
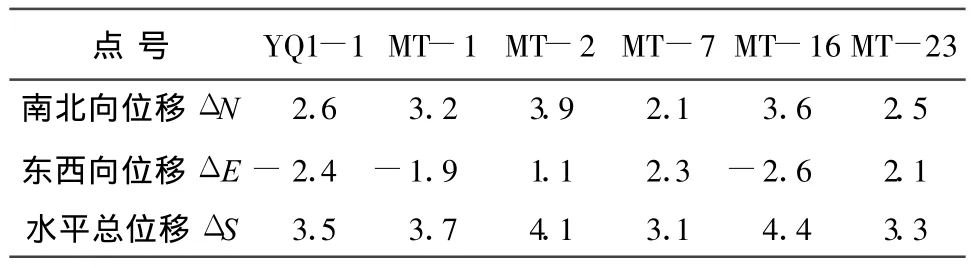
表4 监测点累计位移量 单位:mm
5 结 论
传统的码头水平位移监测方法很多,各有适用条件,高精度GPS应用到码头监测中有很多优势,不但精度高,而且施测方便,可以满足实际监测要求,从而大大改善了变形监测的作业方式及数据处理过程。
(1)通过某码头监测实例分析,表明利用GPS进行测量,监测点的平面精度完全可以满足码头二等精度的要求。
(2)GPS高程方向的精度要比平面精度差一些,码头平面位移监测和沉降监测要分开进行,平面位移监测用GPS,沉降监测仍然用二等水准进行测量。
(3)每个码头自身环境的复杂情况不同,在埋点时要根据不同的情况选出最有利于GPS观测的位置,受遮挡的点位可以通过适当延长观测时间来提高点位精度。
(4)对码头进行的10期监测数据分析得出该码头整体稳定性良好。
[1]谷川,李明峰,潘国荣.某码头施工水平位移监测方法与精度探讨[J].测绘信息与工程,2006,31(4):16-17.
[2]徐绍铨,张华海,杨志强,等.GPS测量原理及应用[M].武汉:武汉大学出版社,2008.
[3]何丞杰,邓克寰,杨宜清.GPS在工业厂区变形监测中的应用[J].测绘工程,2002,11(1):42-44.
[4]裴世建,王祖军.GPS在滑坡监测中的应用[J].工程勘察,2007,(10):55-57.
[5]苏新洲,苏欣,杨晓明.GPS在大型桥梁形变监测中的应用[J].铁道工程学报,2004,(1):77-79.
[6]天津航道局.JTJ203-2001.水运工程测量规范[S].北京:人民交通出版社,2002
[7]张正禄.工程测量学[M].武汉:武汉大学出版社,2005.
猜你喜欢
环球时报(2022-07-29)2022-07-29 20:11:23
华中建筑(2022年4期)2022-04-14 07:50:52
高技术通讯(2021年3期)2021-06-09 06:57:46
现代测绘(2021年1期)2021-04-28 10:19:56
科学(2020年5期)2020-11-26 08:19:14
小星星·阅读100分(高年级)(2017年2期)2017-02-24 09:27:00
小星星·阅读100分(高年级)(2017年2期)2017-02-24 07:45:28
舰船电子对抗(2016年5期)2016-12-13 08:41:14
作文与考试·小学高年级版(2016年7期)2016-05-14 05:39:03
航天器工程(2014年5期)2014-03-11 16:35:50