
YH-7000VG型惯导与弹载计算机的数据通信设计
2011-06-01 09:20赵红超
自动化仪表 2011年8期
王 亭 赵红超
(海军航空工程学院七系,山东 烟台 264001)
0 引言
惯导系统是测量空间参数和运动参数的惯性传感器系统,它是导弹控制系统的重要组成部分。弹载计算机采集惯导系统的空间、运动参数,并进行制导控制、姿态控制等控制算法的运算,得到控制量并输出给舵系统或伺服系统,完成对导弹的姿态、弹道的控制。因此,弹载计算机是导弹控制系统中的控制中枢[1-2]。
本文构建了一套超声速导弹的半实物仿真系统[3]。其中,弹载计算机是自行研制的设备,它以DSP TMS320F240PQ 为中央处理器[4-5];选用云海公司的YH-7000VG型惯导作为惯性测试设备,放置在三轴转台上;采用德国Dspace仿真机来实时模拟导弹的空间位置和运动状态,并控制转台转动,以带动惯导转动。YH-7000VG惯导敏感转台的转动角度、角速度、加速度等运动参数被送入弹载计算机。弹载计算机采集这些数据后进行处理,作为控制算法的输入参数。实时数据通信技术是导弹半实物仿真系统的一项关键技术,为此,本文研究了惯导和弹载计算机之间数据通信的工程化电路设计、设备之间的线路连接、设备通信内部配置、DSP通信软件编程方法、数据转换等技术内容。
1 YH-7000VG惯导性能设置
YH-7000惯导系统有惯性测量单元(inertial measurement unit,IMU)和垂直陀螺(vertical gyro,VG)这两种型号,属于高性能空间角度和运动参数测量装置。
本半实物仿真系统采用的是YH-7000VG。
YH-7000VG的工作电源采用单一的直流供电方式,供电电压范围为8~24 VDC。在设备21芯插座的第6针为VDC+输入,11、15针为Ground电源地输入。
1.1 数据输出方式选择
YH-7000VG惯导能够测量滚动角和俯仰角的角度参数、XYZ三个方向的转动角速度以及这三个方向的运动加速度等数据。
YH-7000VG惯导的串行口通信的数据格式为数据包形式,一个数据包为23 B的数据。数据的输出有两种方式:一种是模拟量输出,可供弹载计算机采用ADC进行数据采集;另一种是高速串行口通信方式[6-7],即惯导和弹载计算机通过 RS-232 串行口相联,进行数据交换。模拟量输出方式需要弹载计算机具备八通道同步的高速、高分辨率ADC数据采集通路,这就增加了弹载计算机的复杂性,且模拟信号易受到电磁干扰。因此,本系统采用第二种方式,即高速串行口通信方式。YH-7000VG的RS-232接口信号的定义如表1所示。

表1 接口信号定义Tab.1 Definition of the interfacing signals
1.2 惯导波特率的设置
1.2.1 通信波特率的选择
弹载计算机的控制运算周期定为T=10 ms,它主要包括:数据采集时间T1、控制算法运算时间T2和控制输出时间T3。因此,必须满足:T1+T2+T3<T。通过实际运行测试发现,T2+T3的最长时间为5.1 ms。因此,要求 T1不大于4.9 ms。
YH-7000VG的串行口通信协议为:一个停止位,八个有效数据位和一个停止位。默认波特率为38400 bit/s,但传输一个数据包需要8.6 ms,数据刷新率为115 Hz,这显然不能满足系统的需要。为此,选择其最快的数据传输速率,即115200 bit/s的波特率,传输一个数据包需要 4.6 ms,数据刷新率为 210 Hz,此时,T1+T2+T3=9.7 ms,满足系统需要。
1.2.2 惯导的波特率设置
YH-7000VG惯导的波特率设置可以通过弹载计算机给其发送相应的控制命令进行设置。由于YH-7000VG的默认波特率为38400 bit/s,因此弹载计算机也需要首先设置自己的波特率为38400 bit/s,然后在此状态下向惯导发控制命令。弹载计算机向惯导发控制命令的步骤如下。
①复位YH-7000VG:弹载计算机发送“R”命令,复位YH-7000VG;
②暂停YH-7000VG:弹载计算机发送“P”命令,暂停YH-7000VG的数据发送;
③设置YH-7000VG新的波特率:弹载计算机发送“B2”命令,设置 YH-7000VG的通信波特率为115200 bit/s;
④弹载计算机设置本身的波特率为115200 bit/s,这和YH-7000VG的波特率一致,就可以控制惯导设备,与其进行数据通信;
⑤启动YH-7000VG发送测试数据,弹载计算机发送“C”命令,启动YH-7000VG按115200 bit/s的波特率、210 Hz的数据刷新频率连续发送运动参数数据包。
2 基于DSP的弹载计算机设计
2.1 弹载计算机结构
我们研制的超声速导弹半实物仿真系统的结构框图如图1所示。

图1 半实物仿真系统结构框图Fig.1 Structure diagram of half-practicality simulation
图1中,弹载计算机的功能是用来实时接收YH-7000VG惯导输出的运动参数,并以此进行相关控制算法的计算,计算的结果通过DAC输出送给Dspace仿真机。弹载计算机的结构框图如图2所示。

图2 弹载计算机结构框图Fig.2 Structure diagram of missile-borne computer
图2中,JTAG接口是 DSP的仿真接口;DSP TMS320F240PQ由高效率的CMOS技术所研制,具有运算速度快的特点。
为实现更快的计算速度,采用定点式的运算方式。TMS320F240PQ内部具有程序存储器Flash 32 kB,作为用户程序代码固化;544 b的内部RAM,作为数据存储器[8]。
设计过程中,系统另扩展两片高速RAM CY7C1021-15ZC,作为数据存储器和调试期间用户程序运行区域。DAC转换器件采用BB公司的12位转换器DAC7545。为了使模拟输出具有双极性,还设计了信号调制电路。
2.2 RS-232串行口驱动电路设计
由于DSP的串行口信号是TTL电平,而本文采用的YH-7000VG的串行口信号是标准的RS-232电平。为了使这两种信号兼容,设计了RS-232串行口电平驱动电路。串行口的电平驱动采用MAXIM的MAX232CPE,其最大信号传输速率为120 kB/s,因此能满足波特率为115200 bit/s的信号传输要求。RS-232串行口电平驱动电路如图3所示。
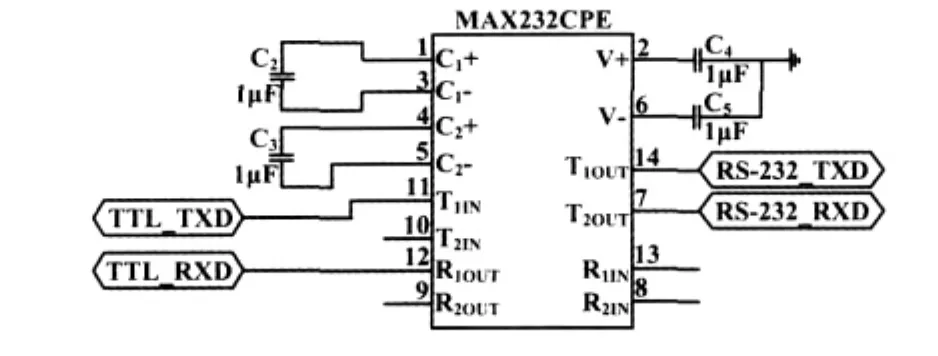
图3 串行口电平驱动电路Fig.3 Electronic driving circuit of serial port
3 弹载计算机软件设计
弹载计算机的软件功能是结合系统的硬件完成对YH-7000VG惯导的工作方式设置,并与其进行高速数据通信,接收其运动参数,进行数据转换,然后进行控制算法的计算和结果输出。软件设计流程图如图4所示。

图4 软件设计流程图Fig.4 Flowchart of software design
弹载计算机软件程序分为DSP工作初始化程序、YH-7000VG的工作方式设置程序、惯性运动参数接收程序、三个通道控制算法解算程序和解算结果输出程序。DSP控制算法程序的功能是结合硬件电路实现从仿真机接收控制算法需要的参数,然后进行导弹控制算法的解算,并将解算的结果输出,完成一个控制周期的运算,直到飞行仿真结束。此部分程序采用DSP-C语言编写,结构、语句和数据结构符合标准C语言。通过DSP仿真器对软件进行调试。DSP仿真器利用计算机的USB接口和仿真器连接,仿真器通过JTAG接口与弹载计算机的DSP仿真口连接。
3.1 串行口初始化
DSP的工作电路采用11.0592 MHz的外频晶振,设置DSP的时钟寄存器 CLKCR0=0XC3,CLKCR1=0XCA,则弹载计算机 DSP的系统工作时钟 clksys=DSP的SCI波特率设置寄存器,其中,BAUD为拟设置的波特率。由于系统要用到两个波特率:38400 bit/s和115200 bit/s,因此对应的BRR分别为26和8。系统程序调用子程序INIT_RSINT来设置波特率,程序语句如下:

3.2 YH-7000VG惯导的设置
在上电复位的状态下,弹载计算机按以下顺序向YH-7000VG惯导发送设置命令,编程如下:① DSP设置本身的波特率38400 bit/s:INIT_RSINT(38400);② 向YH-7000VG发复位命令:SCITXBUF=‘R’;longwait(1);③ 发暂停数据输出命令:SCITXBUF=‘P’;longwait(1);④设置YH-7000VG新的波特率:SCITXBUF=‘B’;while((SCICTL2 & 0x80)!=0x80){};SCITXBUF=‘2’;longwait(1);⑤ 设置 DSP新的通信波特率:INIT_RSINT(115200);⑥ 发连续数据输出命令:SCITXBUF=‘C’;longwait(1)。此时,YH-7000VG惯导就连续以115200 bit/s的波特率、210 Hz的数据刷新率向弹载计算机发送导弹运动数据。
3.3 数据接收与变换
弹载计算机进行数据接收与变换的程序如下:


4 结束语
本文简单介绍了YH-7000VG惯导的应用性能设置,设计并实现了基于DSP TMS320F240PQ的弹载计算机和YH-7000VG惯导系统之间的高速数据通信。试验运行表明,弹载计算机采集YH-7000VG惯导的运动参数准确完整、可靠性高,数据通信的传输无误码,完全满足某超声速导弹半实物仿真系统的需要。
[1]周小刚,佘嫱,钱培贤.地面计算机串并行通讯[J].国外电子测量技术,2005(5):47-49.
[2]白云,黄孝文,赵俊峰.捷联惯导半实物仿真测试系统研究[J].航天控制,2010,28(3):56 -58.
[3]耿东平,王正平,郝磊.导弹制导控制系统半实物仿真系统的设计与实现[J].飞行力学,2008,26(5):75 -78.
[4]黄英哲,黄胜源.TMS320F240原理与C语言控制应用实习[M].北京:中国水利水电出版社,2003.
[5]吴爱华,茅靖峰.TMS320F240DSP与点阵字符型液晶显示模块的接口设计[J].南通工学院学报:自然科学版,2004,3(1):73 -75.
[6]郭京蕾,吴勇.DSP和PC机的串行通信[J].计算机工程与设计,2004,25(3):475 -477.
[7]陆超芬.DSP与计算机串行通信设计及编程研究[J].中国科技信息,2010(1):114-115.
[8]相里坤.TMS320F24x系列芯片串行接口的设计与扩展[J].无线电工程,2008,38(8):52-54.
猜你喜欢
现代电子技术(2022年20期)2022-10-15
舰船科学技术(2022年10期)2022-06-17
智能制造(2020年5期)2020-07-03
商品与质量(2018年47期)2018-12-07
科教导刊·电子版(2018年27期)2018-10-31
铁道通信信号(2018年5期)2018-06-28
北京航空航天大学学报(2018年1期)2018-04-20
计算机系统应用(2018年1期)2018-02-07
电子制作(2017年17期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
