
基于单片机和增量式光电编码器脉冲检测电路的设计
2011-05-29 07:32周祥才
常州工学院学报 2011年6期
周祥才
(常州工学院光电工程学院,江苏 常州 213002)
0 引言
光电编码器内部是一组码盘结构,一旦受到外部的振动或抖动干扰,A、B通道输出信号有可能出现干扰的窄脉冲信号,引起正反向错误计数[1],出现误码现象。减少或消除误码的方法很多,如通过辨向和电子细分电路设计[2],让干扰引起的正反计数相抵消,减少误码的影响,但干扰不具备对称性,计数不受控,实际上不能完全消除误码;利用A、B通道信号出现的有限状态机设计硬件电路[3],通过数据储存器(RAM)固定地址的有序状态输出和软件判别排除误码,该方法有较好的效果,但不具备四倍频功能,另外RAM数据地址固定不变,干扰脉冲的存在会引起RAM数据地址复位,出现漏计数。
针对四倍频电路的计数脉冲输出,设计了相应计数脉冲的状态电路,并通过软件对计数状态的识别,甄别每个正反计数脉冲,从根本上消除误码计数。
1 系统电路设计及其工作原理
图1为采用逻辑门电路获得的四细分辨向电路[4]。RC积分电路和与门组成单稳态窄脉冲信号产生电路,在A、B信号跳变处产生四路相位依次相差的窄脉冲,后经四与或门实现信号四倍频电子细分和辨向。正向旋转时,u01为脉冲信号,u02为高电平,电路各点的信号状态和输出波形如图2所示。当反向旋转时,u01为高电平,u02为脉冲信号。为实现统一计数和方向识别,将输出信号u01、u02接入与门U5,获得正反向的计数脉冲,并连接至单片机的端,实现边沿触发中断计数[4],同时将 u01、u02分别接入 P1.4、P1.5,用于正反向方向识别。

图1 电子四细分及辨向电路图
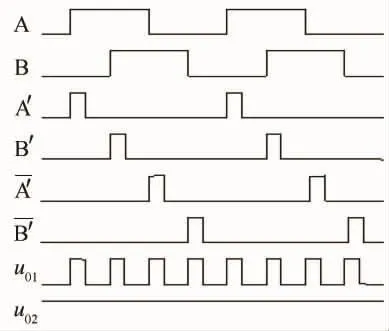
图2 四倍频脉冲输出状态波形图
在码盘正反转变化的一个周期内,正反转各有4个脉冲输出,为表征每一个计数脉冲,需要8种状态对应于正反转的8个计数脉冲,显然仅用A、B信号变化状态是不够的。本文采用4个D触发器组成计数脉冲到来时相对应的时序状态信号产生电路,如图3所示。

图3 计数脉冲输出状态电路图
D触发器两两串联,同相端信号输出的特性方程为:

D触发器同相端信号输出状态 Q4、Q3、Q2、Q1刚好对应正反转的计数脉冲,正向转动时的状态波形如图4所示。

图4 计数脉冲状态波形图
当供给D触发器的时钟信号足够高时,一般取A、B通道信号最高频率的8倍以上,则在正反转时,A、B 通道信号跳变处的状态由 Q4、Q3、Q2、Q1表示,状态固定且有序。例如,正转时,A信号超前于B信号,脉冲计数状态分别为0001、0111、1110、1000,由于 Q4、Q3、Q2、Q1输出信号接入单片机的 P1 口的 P1.3~ P1.0,若屏蔽 P1 口的高4位,则状态可分别记为01H、07H、0EH、08H。同理,当反转时,脉冲计数状态分别为0100、1101、1011、0010,状态分别为04H、0DH、0BH、02H。
当U5输出的计数脉冲到来时,引起端下降沿触发中断。在中断程序中,脉冲能否被计数需要判定以下条件:①读取 P1.4、P1.5值,判定是否是正反转方向;②读取 P1.3~ P1.0值,判定是否是正转或反转时允许出现的正常状态;③如果是计数状态,还需要判定是否与上一个脉冲计数状态不相同。因为在正常转动时,Q4、Q3、Q2、Q1的状态是按时序变化的,若干扰脉冲产生时,有可能出现连续多个允许计数状态,如果不加判断,则有可能产生误计数。如图5是在正向转动时,由于抖动在A通道出现干扰脉冲时的状态波形图。Q4、Q3、Q2、Q1依次出现了 01H、07H、0EH、0DH、0EH、08H多个状态,第一、第二、第三和第六个状态是正常计数状态,第四个状态0DH是非计数状态,第五个状态0EH虽是计数状态,但由于与前一个计数状态相同,不能被计数。
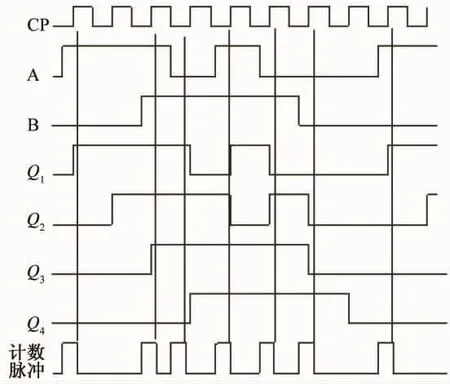
图5 干扰时脉冲计数状态波形图
2 计数中断程序的实现
检测角位移和角速度的计数方法略有不同,前者只需连续计数,而后者则需要获取单位时间内的计数,一般通过T0定时中断程序设置中断时间,获得单位时间的脉冲计数。角位移的脉冲计数中断程序主要包括:P1口的取值;判断 P1.4、P1.5的电平,确认是加数还是减数;判断P1的低4位是否是计数状态;判断加减状态是否是上次计数状态;完成加减数;保存本次计数状态,具体流程图如图6所示。

图6 中断程序流程图
3 结语
通过识别计数脉冲状态,提高了光电编码器系统的计数准确性,有效地防止了误码被计数。但由于每次计数需要单片机的中断响应和状态判断,限制了计数脉冲频率上限。因此,采用这种方法时,需要根据运动部件的转速和选用的光电编码器的每转脉冲数估算通道的输出脉冲的最高频率,恰当地选取单片机的工作频率,确保相邻两计数脉冲到来时,系统能够响应计数中断,以免漏计数。
[1]李红果.一种光电编码器位置检测系统研究与应用[J].微计算机信息,2008,24(2):88 -89.
[2]刘玉凤,刘学军.基于增量式光电编码盘的电机测速研究[J].机械与电子,2010(2):45-47.
[3]蒋晶,蒋东方,高航.高可靠性增量式光电编码接口电路设计[J].测控技术,2009,28(2):1-4.
[4]张国雄,金篆芷.测控电路[M].北京:机械工业出版社,2000.
猜你喜欢
中学生数理化·八年级物理人教版(2021年9期)2021-11-20
攀枝花学院学报(2021年5期)2021-10-19
铁道通信信号(2019年2期)2019-03-26
通信技术(2018年11期)2018-11-07
电子制作(2018年11期)2018-08-04
山东工业技术(2018年5期)2018-03-10
大陆桥视野·下(2017年9期)2017-09-17
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
电信科学(2016年9期)2016-06-15
