基于人工矢量场的AUV自主回收路径规划
2011-05-27 08:48严卫生施淑伟
水下无人系统学报 2011年2期
薛 源, 严卫生, 高 剑, 施淑伟
基于人工矢量场的AUV自主回收路径规划
薛 源, 严卫生, 高 剑, 施淑伟
(西北工业大学 航海学院, 陕西 西安, 710072)
针对自主水下航行器(AUV)水下自主回收过程中的路径规划问题, 采用人工矢量场法规划回收路径。将回收过程划分为回坞导引阶段和入坞阶段, 其中回坞导引阶段以入坞预备点为目标点, 使用传统的人工矢量场法为AUV规划出一条无障碍路径; 而入坞阶段则采用模糊变系数矢量场法, 定义回收入口处的3个虚拟目标点, 将AUV到回收中轴线的距离作为输入, 通过模糊规则调整虚拟目标点的引力系数, 使人工引力场的梯度方向指向回收入口, AUV沿光滑的入坞路径以期望的姿态驶进回收入口。仿真结果证明了该路径规划方法的有效性。
自主水下航行器;自主回收;路径规划;人工矢量场;引力系数
0 引言
自主水下航行器(autonomous underwater vehicle, AUV)在国土防卫、海洋考察等各个领域都发挥着重要的作用。受到自身体积的限制, AUV所能携带的能源有限, 这使得AUV无法执行长时间或远航程的任务。若能充分利用AUV的自主控制能力, 通过特定的回收机构对AUV进行自主回收, 实现AUV的自主能源补给、任务再规划等, 从而有效提高续航能力、增加任务的多样性, 且可大大降低任务成本。
路径规划是AUV自主回收的关键技术之一, 自上世纪90年代以来, 得到了研究人员的广泛重视。其中, Park等人[1]利用安装在AUV上的电荷耦合器件来捕捉分布在回收入口边缘的若干光源, 估计回收平台入口的准确位置, 采用视觉导引方法进行AUV回收的路径规划。Feezor等人[2]则采用电磁导引方法, 回收平台上安装有电磁场发生器, AUV通过感应线圈感应回收平台磁场, 从而进行AUV的回收路径规划。Batista 等人[3]利用超短基线水声定位系统直接测量的到达时间差计算期望的AUV回坞过程的航向和姿态。
上述研究中, 存在着作用距离短、环境要求苛刻、数据计算量大、控制精度差等缺点, 而在水声定位的基础上, 采用人工矢量场法进行回收路径规划可有效克服这些缺点。
本文将AUV自主回收过程分成回坞导引阶段和入坞阶段[5-6], 在回坞导引阶段采用传统的人工矢量场法, 引导AUV到达入坞预备点, 在入坞阶段则采用模糊变引力系数的人工矢量场法, 使AUV以光滑轨迹进入回收口, 最后采用仿真方法对回收路径规划算法的有效性进行了验证。
1 问题描述
将AUV自主回收过程的路径规划分成回坞导引阶段和入坞阶段, 以回收平台前方的某一位置为入坞预备点, 从AUV开始自主回收时的位置到入坞预备点为回坞导引阶段, 从入坞预备点开始到进入回收口为入坞阶段,回收平台的中心线定义为中轴线, 如图1所示。
图1 AUV自主回收示意图
Fig 1 Schematic of autonomous recovery of AUV
回坞导引阶段的路径规划目标是, 保证AUV能够安全的避开障碍物, 到达入坞预备点, 这与传统的路径规划目标是一致的。入坞阶段的路径规划目标是, 使AUV能够以期望的航向姿态沿中轴线进入回收平台。
为保证入坞路径的平滑性, 入坞预备点位置的选择应遵循以下原则:
1) 与回收平台之间无障碍物;
2) 与回收平台之间的连线和中轴线的夹角不宜过大;
3) 与回收平台之间的距离不宜过近, 应该有足够的空间调整航向。
2 回坞导引阶段的路径规划
采用人工矢量场法为AUV规划一条从回坞起始点到入坞预备点的无碰路径, 保证AUV的航行安全。人工矢量场方法假设障碍物产生斥力场, 目标产生引力场, AUV在运动空间中的运动沿其受到引力和斥力的合力方向, 从而向入坞预备点位置运动。这里采用文献[4]中定义的势场函数。

与之对应的吸引力为

人工斥力势函数为

相应的斥力可表示为
其中



3 基于模糊变系数矢量场的入坞路径规划
采用人工矢量场法进行路径规划时, 只有目标相对于AUV的方位信息, 因此只能判断回收平台的位置, 而无法判断入口方向, 因而无法完成AUV入坞阶段的路径规划。

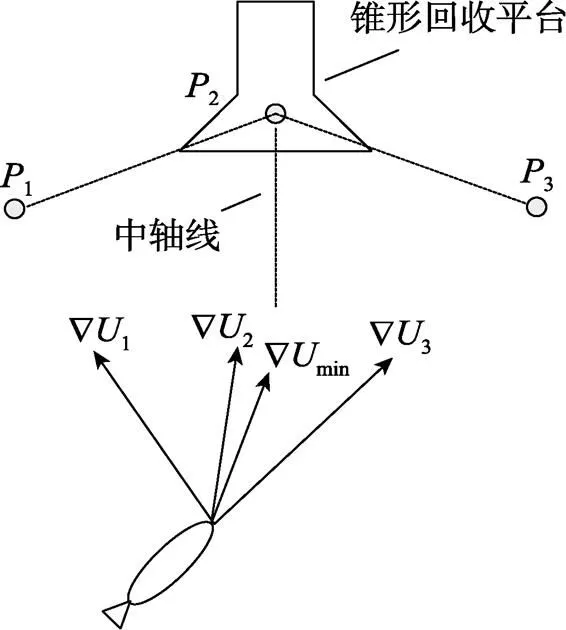
图2 AUV在3个虚拟引力势场下的受力示意图

由图2可以看出, 3个虚拟吸引点分别对AUV产生引力, AUV在合力的作用下向回收入口运动。通过改变3个虚拟吸引点产生作用力的大小调整合力的方向, 从而控制AUV的航向, 使其最终能够沿着中轴线进入回收平台。

图3 入坞阶段示意图
AUV受到的虚拟引力可写为



图4 输入变量D的隶属度函数

图5 输出变量l1,l2和l3的隶属度函数
4 仿真结果与分析
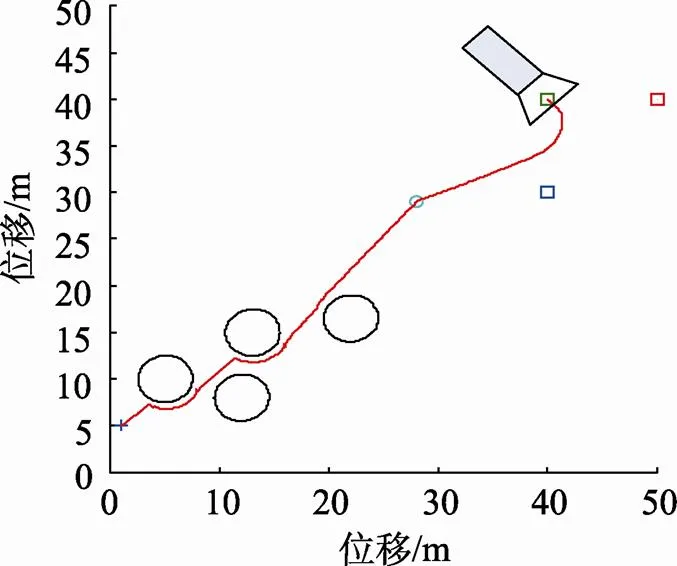
图6 基于人工矢量场法规划出的AUV自主回收路径
由图6可以看出, 传统人工矢量场法在回坞导引阶段能够为AUV规划一条合理的避障路径, 保证了AUV的航行安全; 而在入坞阶段, 变系数矢量场法则通过模糊控制规则调整3个虚拟点的引力系数, 能够规划出一条光滑的入坞路径, 使AUV以最佳航向角沿中轴线进入回收平台。
5 结束语
采用人工矢量场法对AUV自主回收路径规划问题进行了研究, 将整个回收过程分为回坞导引阶段和入坞阶段, 分别采用传统人工矢量场法和模糊变系数矢量场法进行路径规划。仿真结果证明了该方法的有效性。下一步将针对回收平台运动的情况进行回收路径规划问题的研究。
[1] Park S Y, Jun B H, Lee P M, et al. Experiment on Vision Guided Docking of an Autonomous Underwater Vehicle Using One Camera[J], Oceanic Engineering, 2009, 36(1): 48-61.
[2] Feezor M D, Sorrell Y, Blankinship P R, et al. Autonomous Underwater Vehicle Homing/Docking via Electromagnetic Guidance[J]. Oceanic Engineering, 2001, 26(4): 515-521.
[3] Batista P, Silvestre C, Oliveira P. A Sensor-Based Controller for Homing of Underactuated AUVs[J]. IEEE Transactions on Robotics, 2009, 25(3): 701-716.
[4] 王会丽, 傅卫平.基于改进的势场函数的移动机器人路径规划[J]. 机床与液压, 2002, (6): 67-71.
Wang Hui-li, Fu Wei-ping, Fang Zong-de, et al. A Path Plann Method for Mobile Robot Based on Improved Potential Field Function[J]. Machine Tool & Hydraulics, 2002, (6): 67-71.
[5] Jantapremjit P, Wilson P A. Guidance-Control Based Path Following for Homing and Docking using an Autonomous Underwater Vehicle[C]//IEEE, 2008.
[6] Jantapremjit P, Wilson P A. Control and Guidance for Homing and Docking Tasks using an Autonomous Underwater Vehicle[C]//The 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, 2007: 3672-3677.
A Path Planning Method Based on Artificial Vector Field for Autonomous Recovery of AUV
XUE Yuan, YAN Wei-sheng, GAO Jian, SHI Shu-wei
(College of Marine Engineering, Northwestern Polytechnical University, Xi’an 710072,China)
To solve the path planning problem of autonomous underwater vehicle (AUV) in the process of underwater autonomous recovery, an artificial vector field method is adopted. The whole autonomous recovery process is divided into the homing guidance stage and the docking stage. In the homing guidance stage, the preparatory point for docking is taken as the goal, and an obstacle-free path is planned for AUV by the artificial vector field method. In the docking stage, the three virtual goal points at the recovery entrance of the dock are defined with a fuzzy variable-coefficient vector field method. Taking the distance between dock axis and AUV as the input, the coefficients of vector field are adjusted by a fuzzy control method, and the gradient direction of artificial attraction force field is pointed to the entrance of dock by calculating the attraction force coefficients of the virtual target points by fuzzy rules. Hence, AUV can dock into the recovery entrance along the smooth path in the desired posture. Simulation results verify the effectiveness of the presented method.
autonomous underwater vehicle(AUV); autonomous recovery; path planning; artificial vector field; attraction force coefficient
TP242.3;TJ6
A
1673-1948(2011)02-0104-03
2010-10-27;
2010-11-29.
国家自然科学基金资助(50909082).
薛源(1986-), 男, 在读硕士, 主要研究方向为水下航行器控制与仿真.
(责任编辑: 杨力军)
猜你喜欢
军事文摘(2022年8期)2022-11-03
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
小学科学(学生版)(2021年3期)2021-04-13
哈哈画报(2021年11期)2021-02-28
中国交通信息化(2020年11期)2021-01-14
当代陕西(2020年15期)2021-01-07
儿童故事画报·发现号趣味百科(2016年6期)2016-08-19
现代防御技术(2016年1期)2016-06-01
新高考·高一物理(2016年1期)2016-03-05